 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlipNet: Slip Cost Map for Autonomous Navigation on Heterogeneous Deformable Terrains
Paper and Code
Sep 03, 2024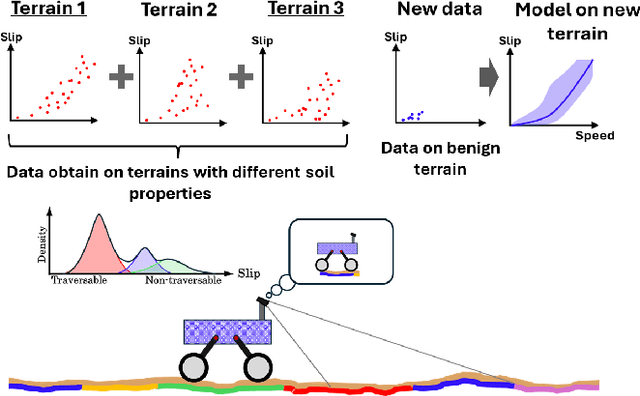
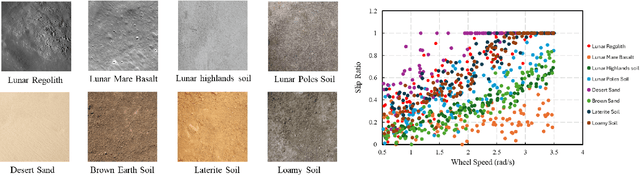
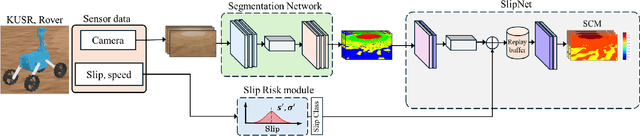
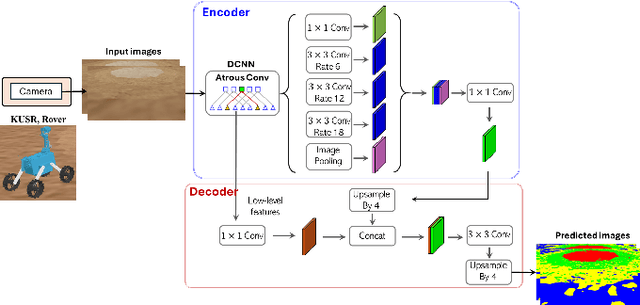
Autonomous space rovers face significant challenges when navigating deformable and heterogeneous terrains during space exploration. The variability in terrain types, influenced by different soil properties, often results in severe wheel slip, compromising navigation efficiency and potentially leading to entrapment. This paper proposes SlipNet, an approach for predicting slip in segmented regions of heterogeneous deformable terrain surfaces to enhance navigation algorithms. Unlike previous methods, SlipNet does not depend on prior terrain classification, reducing prediction errors and misclassifications through dynamic terrain segmentation and slip assignment during deployment while maintaining a history of terrain classes. This adaptive reclassification mechanism has improved prediction performance. Extensive simulation results demonstrate that our model (DeepLab v3+ + SlipNet) achieves better slip prediction performance than the TerrainNet, with a lower mean absolute error (MAE) in five terrain sample tests.