 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Duke Humanoid: Design and Control For Energy Efficient Bipedal Locomotion Using Passive Dynamics
Sep 29, 2024



We present the Duke Humanoid, an open-source 10-degrees-of-freedom humanoid, as an extensible platform for locomotion research. The design mimics human physiology, with minimized leg distances and symmetrical body alignment in the frontal plane to maintain static balance with straight knees. We develop a reinforcement learning policy that can be deployed zero-shot on the hardware for velocity-tracking walking tasks. Additionally, to enhance energy efficiency in locomotion, we propose an end-to-end reinforcement learning algorithm that encourages the robot to leverage passive dynamics. Our experiment results show that our passive policy reduces the cost of transport by up to $50\%$ in simulation and $31\%$ in real-world testing. Our website is http://generalroboticslab.com/DukeHumanoidv1/ .
Text2Robot: Evolutionary Robot Design from Text Descriptions
Jun 28, 2024
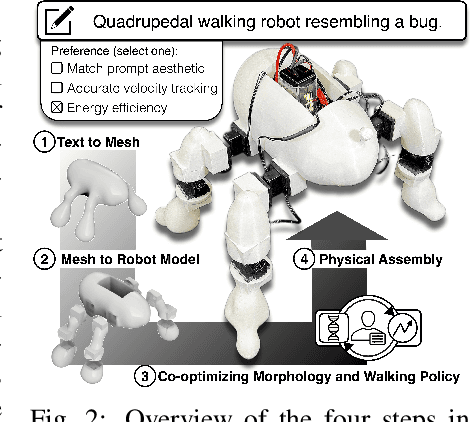
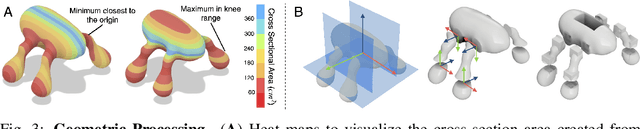
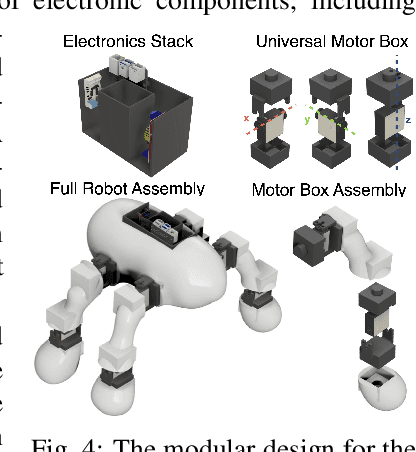
Robot design has traditionally been costly and labor-intensive. Despite advancements in automated processes, it remains challenging to navigate a vast design space while producing physically manufacturable robots. We introduce Text2Robot, a framework that converts user text specifications and performance preferences into physical quadrupedal robots. Within minutes, Text2Robot can use text-to-3D models to provide strong initializations of diverse morphologies. Within a day, our geometric processing algorithms and body-control co-optimization produce a walking robot by explicitly considering real-world electronics and manufacturability. Text2Robot enables rapid prototyping and opens new opportunities for robot design with generative models.
A Massively-Parallel 3D Simulator for Soft and Hybrid Robots
Jul 19, 2022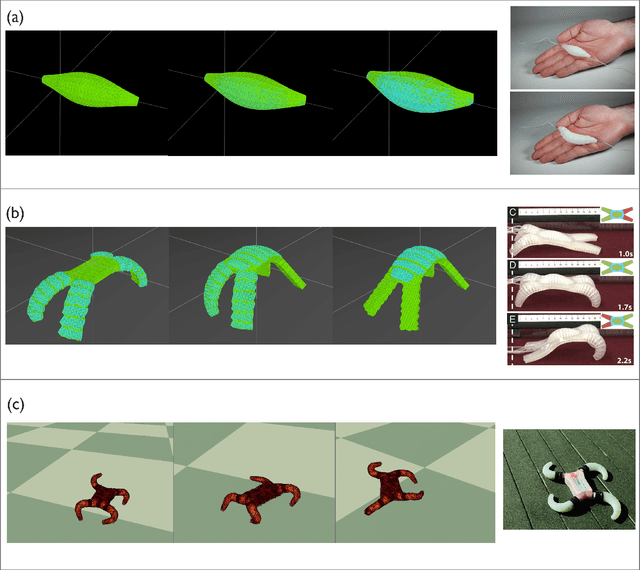
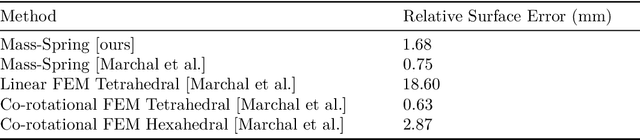
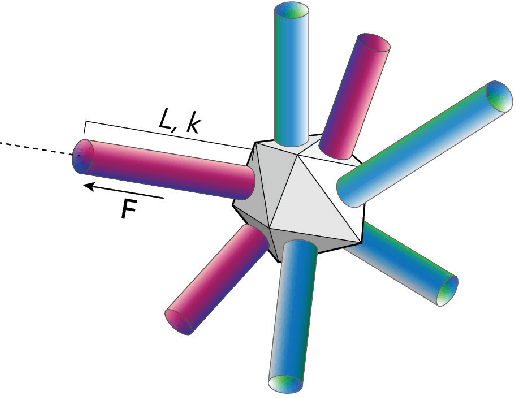
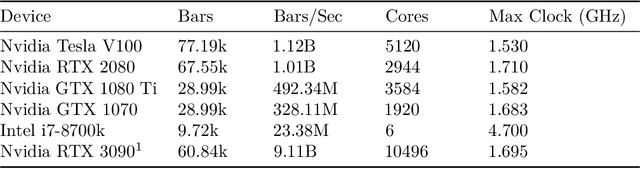
Simulation is an important step in robotics for creating control policies and testing various physical parameters. Soft robotics is a field that presents unique physical challenges for simulating its subjects due to the nonlinearity of deformable material components along with other innovative, and often complex, physical properties. Because of the computational cost of simulating soft and heterogeneous objects with traditional techniques, rigid robotics simulators are not well suited to simulating soft robots. Thus, many engineers must build their own one-off simulators tailored to their system, or use existing simulators with reduced performance. In order to facilitate the development of this exciting technology, this work presents an interactive-speed, accurate, and versatile simulator for a variety of types of soft robots. Cronos, our open-source 3D simulation engine, parallelizes a mass-spring model for ultra-fast performance on both deformable and rigid objects. Our approach is applicable to a wide array of nonlinear material configurations, including high deformability, volumetric actuation, or heterogenous stiffness. This versatility provides the ability to mix materials and geometric components freely within a single robot simulation. By exploiting the flexibility and scalability of nonlinear Hookean mass-spring systems, this framework simulates soft and rigid objects via a highly parallel model for near real-time speed. We describe an efficient GPU CUDA implementation, which we demonstrate to achieve computation of over 1 billion elements per second on consumer-grade GPU cards. Dynamic physical accuracy of the system is validated by comparing results to Euler-Bernoulli beam theory, natural frequency predictions, and empirical data of a soft structure under large deformation.
A Legged Soft Robot Platform for Dynamic Locomotion
Nov 13, 2020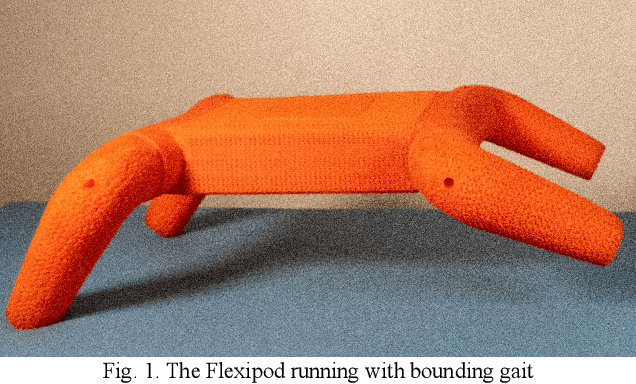
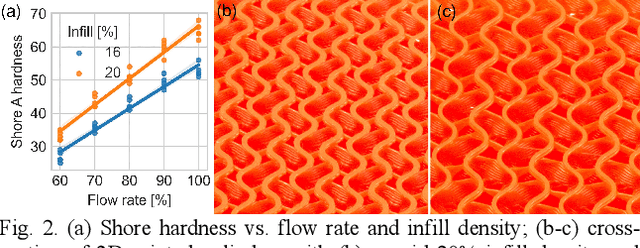
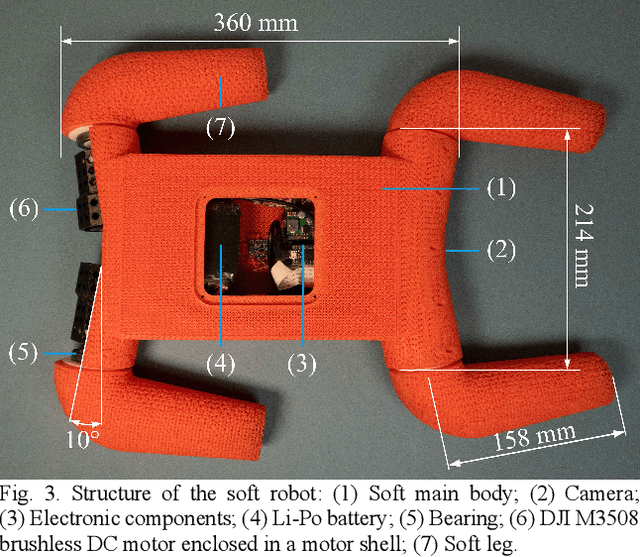
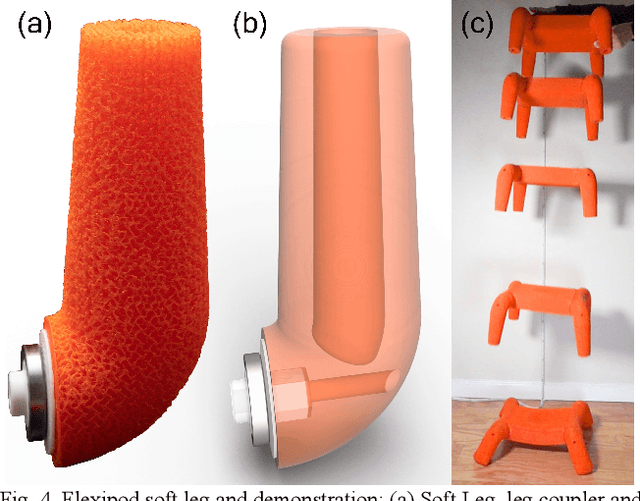
We present an open-source untethered quadrupedal soft robot platform for dynamic locomotion (e.g., high-speed running and backflipping). The robot is mostly soft (80 vol.%) while driven by four geared servo motors. The robot's soft body and soft legs were 3D printed with gyroid infill using a flexible material, enabling it to conform to the environment and passively stabilize during locomotion on multi-terrain environments. In addition, we simulated the robot in a real-time soft body simulation. With tuned gaits in simulation, the real robot can locomote at a speed of 0.9 m/s (2.5 body length/second), substantially faster than most untethered legged soft robots published to date. We hope this platform, along with its verified simulator, can catalyze the development of soft robotics.