 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmCVT: Centroidal Voronoi Tessellation-Based Path Planning for Very-Large-Scale Robotics
Oct 03, 2024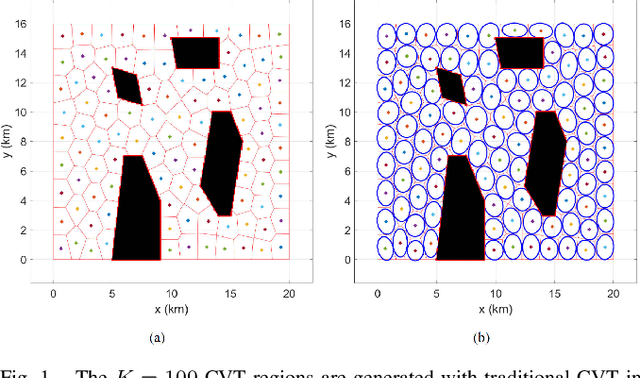

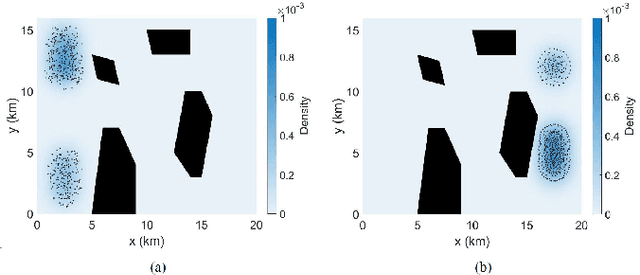
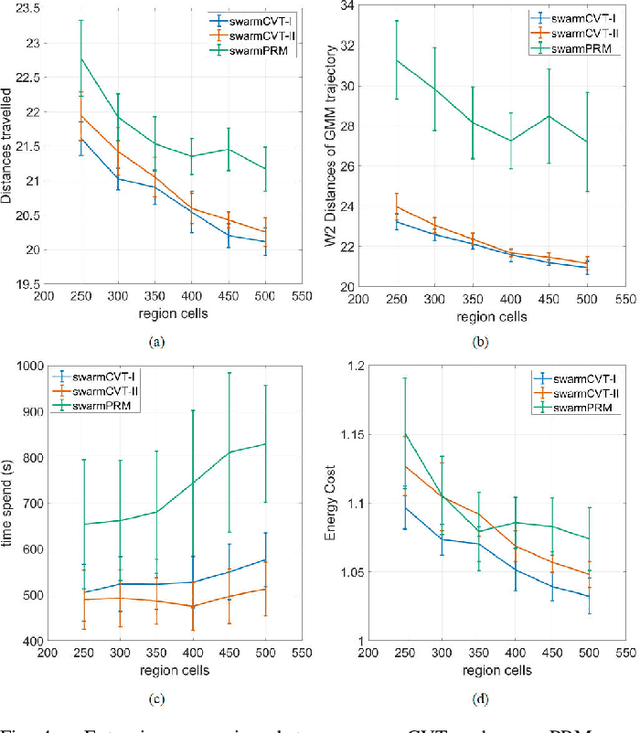
Swarm robotics, or very large-scale robotics (VLSR), has many meaningful applications for complicated tasks. However, the complexity of motion control and energy costs stack up quickly as the number of robots increases. In addressing this problem, our previous studies have formulated various methods employing macroscopic and microscopic approaches. These methods enable microscopic robots to adhere to a reference Gaussian mixture model (GMM) distribution observed at the macroscopic scale. As a result, optimizing the macroscopic level will result in an optimal overall result. However, all these methods require systematic and global generation of Gaussian components (GCs) within obstacle-free areas to construct the GMM trajectories. This work utilizes centroidal Voronoi tessellation to generate GCs methodically. Consequently, it demonstrates performance improvement while also ensuring consistency and reliability.
The Duke Humanoid: Design and Control For Energy Efficient Bipedal Locomotion Using Passive Dynamics
Sep 29, 2024



We present the Duke Humanoid, an open-source 10-degrees-of-freedom humanoid, as an extensible platform for locomotion research. The design mimics human physiology, with minimized leg distances and symmetrical body alignment in the frontal plane to maintain static balance with straight knees. We develop a reinforcement learning policy that can be deployed zero-shot on the hardware for velocity-tracking walking tasks. Additionally, to enhance energy efficiency in locomotion, we propose an end-to-end reinforcement learning algorithm that encourages the robot to leverage passive dynamics. Our experiment results show that our passive policy reduces the cost of transport by up to $50\%$ in simulation and $31\%$ in real-world testing. Our website is http://generalroboticslab.com/DukeHumanoidv1/ .