 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA YOLO-Based Semi-Automated Labeling Approach to Improve Fault Detection Efficiency in Railroad Videos
Apr 01, 2025



Manual labeling for large-scale image and video datasets is often time-intensive, error-prone, and costly, posing a significant barrier to efficient machine learning workflows in fault detection from railroad videos. This study introduces a semi-automated labeling method that utilizes a pre-trained You Only Look Once (YOLO) model to streamline the labeling process and enhance fault detection accuracy in railroad videos. By initiating the process with a small set of manually labeled data, our approach iteratively trains the YOLO model, using each cycle's output to improve model accuracy and progressively reduce the need for human intervention. To facilitate easy correction of model predictions, we developed a system to export YOLO's detection data as an editable text file, enabling rapid adjustments when detections require refinement. This approach decreases labeling time from an average of 2 to 4 minutes per image to 30 seconds to 2 minutes, effectively minimizing labor costs and labeling errors. Unlike costly AI based labeling solutions on paid platforms, our method provides a cost-effective alternative for researchers and practitioners handling large datasets in fault detection and other detection based machine learning applications.
SwarmCVT: Centroidal Voronoi Tessellation-Based Path Planning for Very-Large-Scale Robotics
Oct 03, 2024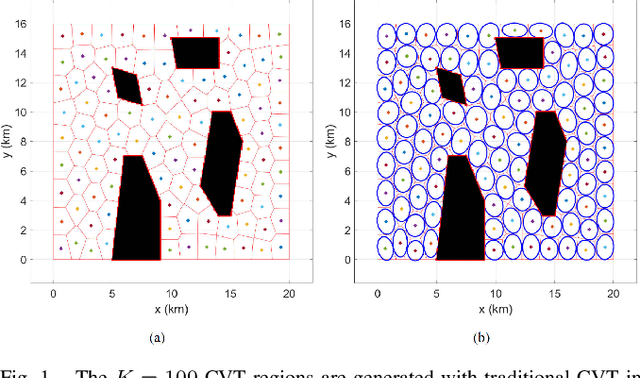

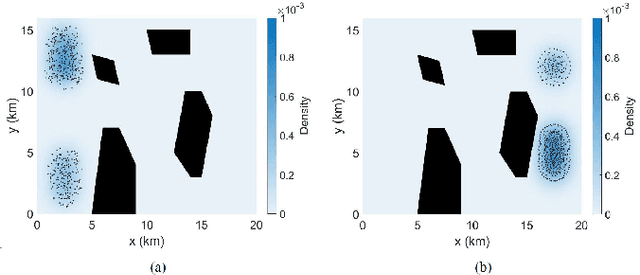
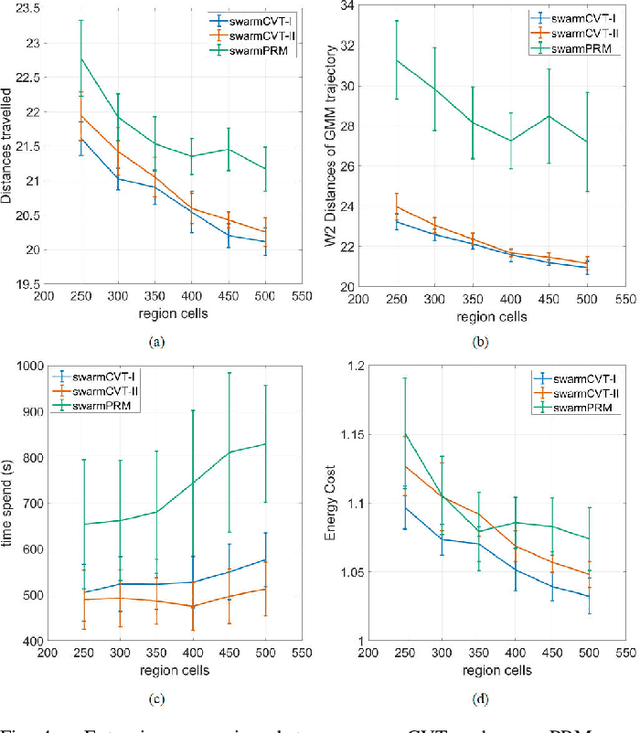
Swarm robotics, or very large-scale robotics (VLSR), has many meaningful applications for complicated tasks. However, the complexity of motion control and energy costs stack up quickly as the number of robots increases. In addressing this problem, our previous studies have formulated various methods employing macroscopic and microscopic approaches. These methods enable microscopic robots to adhere to a reference Gaussian mixture model (GMM) distribution observed at the macroscopic scale. As a result, optimizing the macroscopic level will result in an optimal overall result. However, all these methods require systematic and global generation of Gaussian components (GCs) within obstacle-free areas to construct the GMM trajectories. This work utilizes centroidal Voronoi tessellation to generate GCs methodically. Consequently, it demonstrates performance improvement while also ensuring consistency and reliability.
ROVER: Risk-Aware Swarm Robotics MOtion Planner Using Conditional ValuE at Risk
Feb 26, 2024



The field of swarm robotics has attracted considerable interest for its capacity to complete intricate and synchronized tasks. Existing methodologies for motion planning within swarm robotic systems mainly encounter difficulties in scalability and safety guarantee. To address these two limitations, we propose a Risk-aware swarm mOtion planner using conditional ValuE at Risk (ROVER) that systematically modulates the safety and conservativeness and navigates the swarm to the target area through cluttered environments. Our approach formulates a finite-time model predictive control (FTMPC) problem predicated upon the macroscopic state of the robot swarm represented by Gaussian Mixture Model (GMM) and integrates conditional value-at-risk (CVaR) to avoid collision. We leverage the linearized Signed Distance Function for the efficient computation of CVaR concerning the proximity between the robot swarm to obstacles. The key component of this method is implementing CVaR constraint under GMM uncertainty in the FTMPC to measure the collision risk that a robot swarm faces. However, the non-convex constrained FTMPC is nontrival to solve. To navigate this complexity, we develop a computationally tractable strategy through 1) an explicit linear approximation of the CVaR constraint; and 2) a sequential quadratic programming formulation. Simulations and comparisons with other approaches demonstrate the effectiveness of the proposed method in flexibility, scalability, and risk mitigation.
SwarmPRM: Probabilistic Roadmap Motion Planning for Swarm Robotic Systems
Feb 26, 2024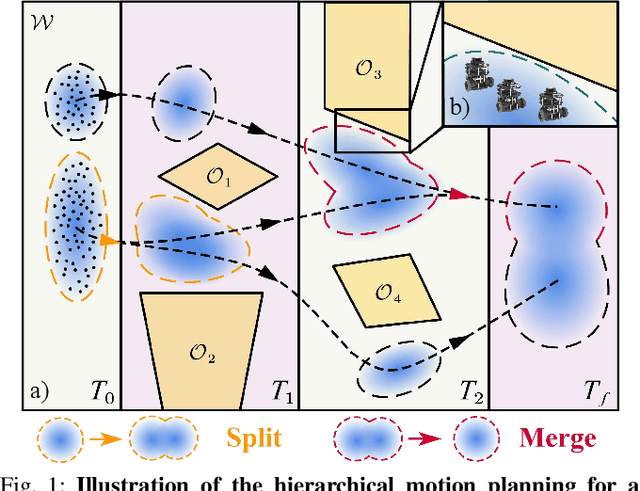
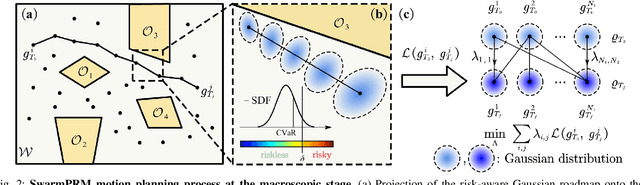
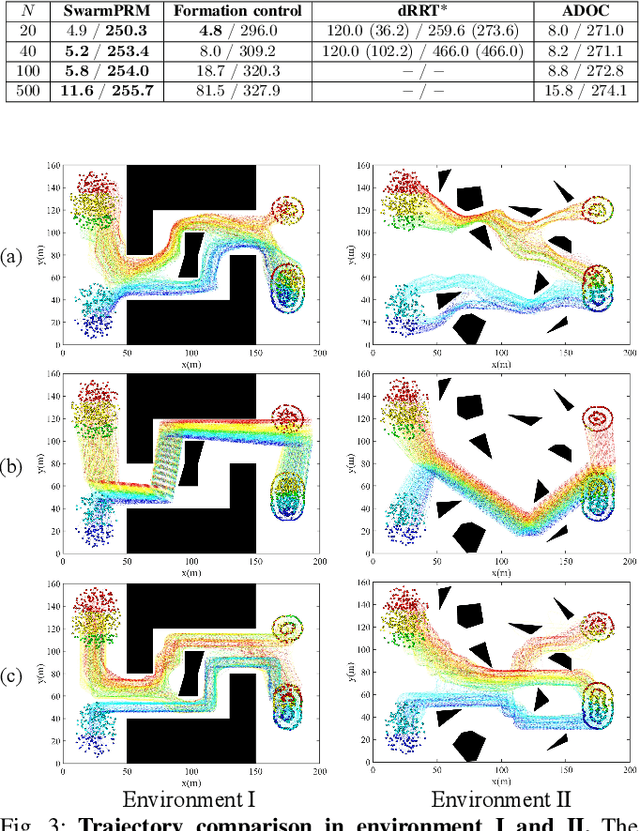
Swarm robotic systems consisting of large-scale cooperative agents hold promise for performing autonomous tasks in diverse fields. However, existing planning strategies for swarm robotic systems often encounter a trade-off between scalability and solution quality. We introduce here SwarmPRM, a hierarchical, highly scalable, computationally efficient, and risk-aware sampling-based motion planning approach for swarm robotic systems, which is asymptotically optimal under mild assumptions. We employ probability density functions (PDFs) to represent the swarm's macroscopic state and utilize optimal mass transport (OMT) theory to measure the swarm's cost to go. A risk-aware Gaussian roadmap is constructed wherein each node encapsulates a distinct PDF and conditional-value-at-risk (CVaR) is employed to assess the collision risk, facilitating the generation of macroscopic PDFs in Wasserstein-GMM space. Extensive simulations demonstrate that the proposed approach outperforms state-of-the-art methods in terms of computational efficiency and the average travelling distance.
A Novel Multivariate Skew-Normal Mixture Model and Its Application in Path-Planning for Very-Large-Scale Robotic Systems
Feb 16, 2024



This paper addresses the path-planning challenge for very large-scale robotic systems (VLSR) operating in complex and cluttered environments. VLSR systems consist of numerous cooperative agents or robots working together autonomously. Traditionally, many approaches for VLSR systems are developed based on Gaussian mixture models (GMMs), where the GMMs represent agents' evolving spatial distribution, serving as a macroscopic view of the system's state. However, our recent research into VLSR systems has unveiled limitations in using GMMs to represent agent distributions, especially in cluttered environments. To overcome these limitations, we propose a novel model called the skew-normal mixture model (SNMM) for representing agent distributions. Additionally, we present a parameter learning algorithm designed to estimate the SNMM's parameters using sample data. Furthermore, we develop two SNMM-based path-planning algorithms to guide VLSR systems through complex and cluttered environments. Our simulation results demonstrate the effectiveness and superiority of these algorithms compared to GMM-based path-planning methods.
Heuristic Satisficing Inferential Decision Making in Human and Robot Active Perception
Sep 14, 2023



Inferential decision-making algorithms typically assume that an underlying probabilistic model of decision alternatives and outcomes may be learned a priori or online. Furthermore, when applied to robots in real-world settings they often perform unsatisfactorily or fail to accomplish the necessary tasks because this assumption is violated and/or they experience unanticipated external pressures and constraints. Cognitive studies presented in this and other papers show that humans cope with complex and unknown settings by modulating between near-optimal and satisficing solutions, including heuristics, by leveraging information value of available environmental cues that are possibly redundant. Using the benchmark inferential decision problem known as ``treasure hunt", this paper develops a general approach for investigating and modeling active perception solutions under pressure. By simulating treasure hunt problems in virtual worlds, our approach learns generalizable strategies from high performers that, when applied to robots, allow them to modulate between optimal and heuristic solutions on the basis of external pressures and probabilistic models, if and when available. The result is a suite of active perception algorithms for camera-equipped robots that outperform treasure-hunt solutions obtained via cell decomposition, information roadmap, and information potential algorithms, in both high-fidelity numerical simulations and physical experiments. The effectiveness of the new active perception strategies is demonstrated under a broad range of unanticipated conditions that cause existing algorithms to fail to complete the search for treasures, such as unmodelled time constraints, resource constraints, and adverse weather (fog).
Cell Multi-Bernoulli Sensor Control for Multi-object Search-While-Tracking
Aug 25, 2021

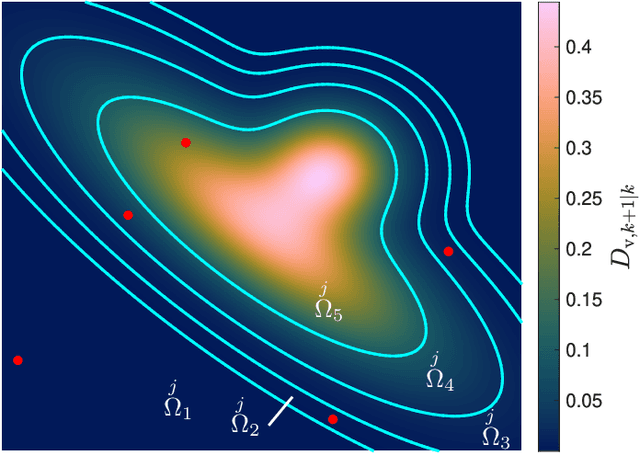
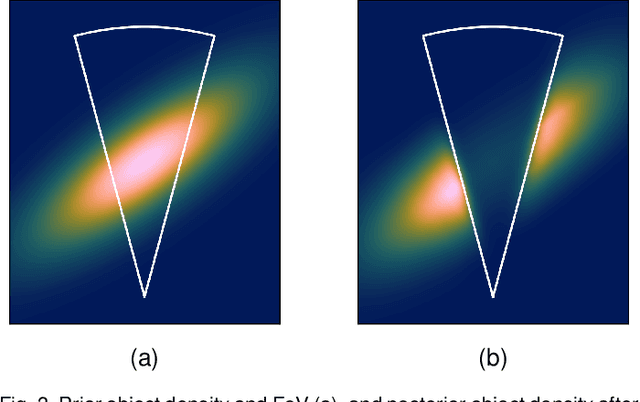
Information driven control can be used to develop intelligent sensors that can optimize their measurement value based on environmental feedback. In object tracking applications, sensor actions are chosen based on the expected reduction in uncertainty also known as information gain. Random finite set (RFS) theory provides a formalism for quantifying and estimating information gain in multi-object tracking problems. However, estimating information gain in these applications remains computationally challenging. This paper presents a new tractable approximation of the RFS expected information gain applicable to sensor control for multi-object search and tracking. Unlike existing RFS approaches, the approximation presented in this paper accounts for noisy measurements, missed detections, false alarms, and object appearance/disappearance. The effectiveness of the information driven sensor control is demonstrated through a multi-vehicle search-while-tracking experiment using real video data from a remote optical sensor.