 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnscented and Higher-Order Linear Covariance Fidelity Checks and Measures of Non-Gaussianity
Dec 29, 2025Linear covariance (LinCov) techniques have gained widespread traction in the modeling of uncertainty, including in the preliminary study of spacecraft navigation performance. While LinCov methods offer improved computational efficiency compared to Monte Carlo based uncertainty analysis, they inherently rely on linearization approximations. Understanding the fidelity of these approximations and identifying when they are deficient is critically important for spacecraft navigation and mission planning, especially when dealing with highly nonlinear systems and large state uncertainties. This work presents a number of computational techniques for assessing linear covariance performance. These new LinCov fidelity measures are formulated using higher-order statistics, constrained optimization, and the unscented transform.
Higher-Order Tensor-Based Deferral of Gaussian Splitting for Orbit Uncertainty Propagation
Jul 02, 2025Accurate propagation of orbital uncertainty is essential for a range of applications within space domain awareness. Adaptive Gaussian mixture-based approaches offer tractable nonlinear uncertainty propagation through splitting mixands to increase resolution in areas of stronger nonlinearities, as well as by reducing mixands to prevent unnecessary computational effort. Recent work introduced principled heuristics that incorporate information from the system dynamics and initial uncertainty to determine optimal directions for splitting. This paper develops adaptive uncertainty propagation methods based on these robust splitting techniques. A deferred splitting algorithm tightly integrated with higher-order splitting techniques is proposed and shown to offer substantial gains in computational efficiency without sacrificing accuracy. Second-order propagation of mixand moments is also seen to improve accuracy while retaining significant computational savings from deferred splitting. Different immediate and deferred splitting methods are compared in three representative test cases, including a geostationary orbit, a Molniya orbit, and a periodic three-body orbit.
Nonlinearity and Uncertainty Informed Moment-Matching Gaussian Mixture Splitting
Nov 30, 2024
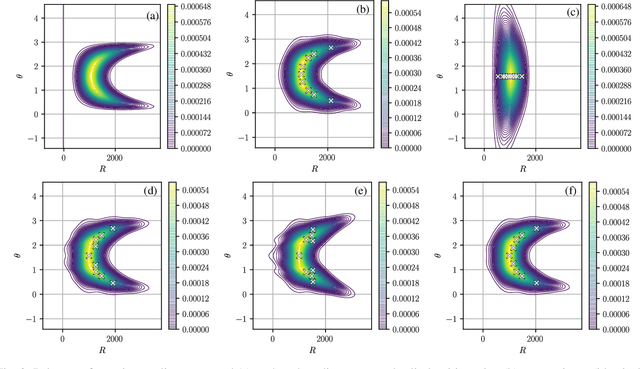
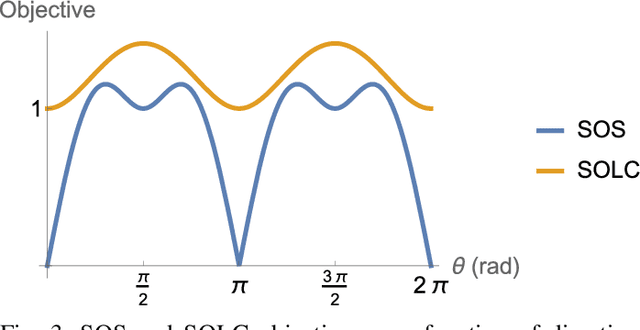
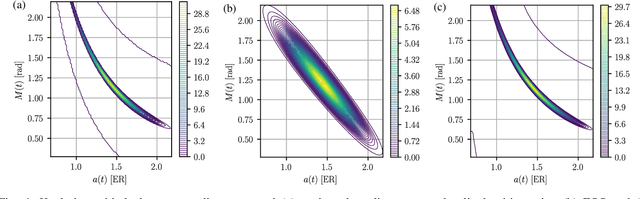
Many problems in navigation and tracking require increasingly accurate characterizations of the evolution of uncertainty in nonlinear systems. Nonlinear uncertainty propagation approaches based on Gaussian mixture density approximations offer distinct advantages over sampling based methods in their computational cost and continuous representation. State-of-the-art Gaussian mixture approaches are adaptive in that individual Gaussian mixands are selectively split into mixtures to yield better approximations of the true propagated distribution. Despite the importance of the splitting process to accuracy and computational efficiency, relatively little work has been devoted to mixand selection and splitting direction optimization. The first part of this work presents splitting methods that preserve the mean and covariance of the original distribution. Then, we present and compare a number of novel heuristics for selecting the splitting direction. The choice of splitting direction is informed by the initial uncertainty distribution, properties of the nonlinear function through which the original distribution is propagated, and a whitening based natural scaling method to avoid dependence of the splitting direction on the scaling of coordinates. We compare these novel heuristics to existing techniques in three distinct examples involving Cartesian to polar coordinate transformation, Keplerian orbital element propagation, and uncertainty propagation in the circular restricted three-body problem.
Split Happens! Imprecise and Negative Information in Gaussian Mixture Random Finite Set Filtering
Jul 22, 2022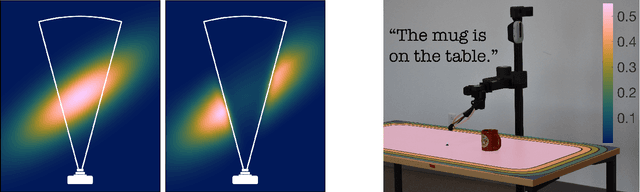
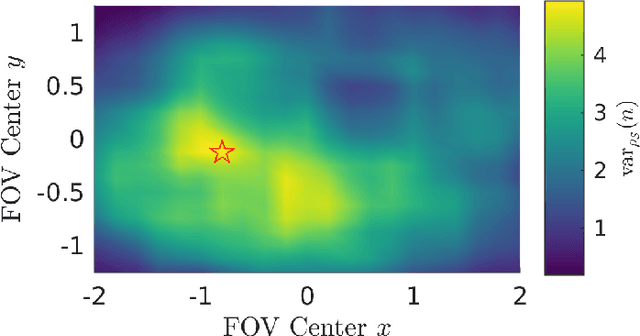
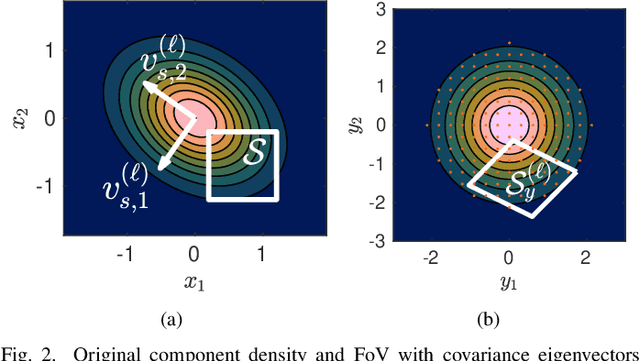

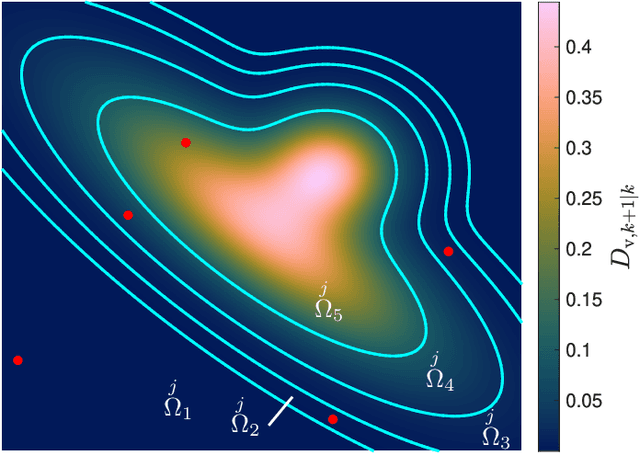
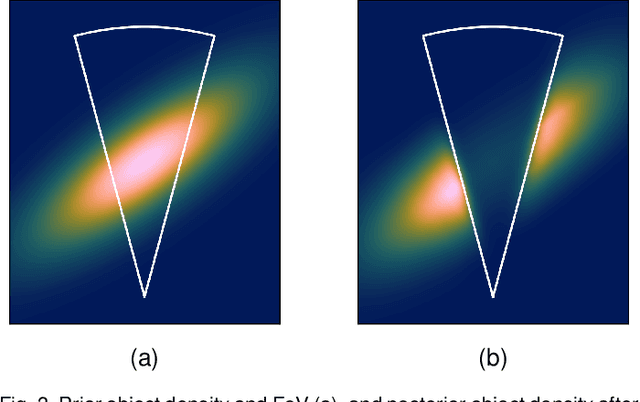
In object tracking and state estimation problems, ambiguous evidence such as imprecise measurements and the absence of detections can contain valuable information and thus be leveraged to further refine the probabilistic belief state. In particular, knowledge of a sensor's bounded field-of-view can be exploited to incorporate evidence of where an object was not observed. This paper presents a systematic approach for incorporating knowledge of the field-of-view geometry and position and object inclusion/exclusion evidence into object state densities and random finite set multi-object cardinality distributions. The resulting state estimation problem is nonlinear and solved using a new Gaussian mixture approximation based on recursive component splitting. Based on this approximation, a novel Gaussian mixture Bernoulli filter for imprecise measurements is derived and demonstrated in a tracking problem using only natural language statements as inputs. This paper also considers the relationship between bounded fields-of-view and cardinality distributions for a representative selection of multi-object distributions, which can be used for sensor planning, as is demonstrated through a problem involving a multi-Bernoulli process with up to one-hundred potential objects.
Cell Multi-Bernoulli Sensor Control for Multi-object Search-While-Tracking
Aug 25, 2021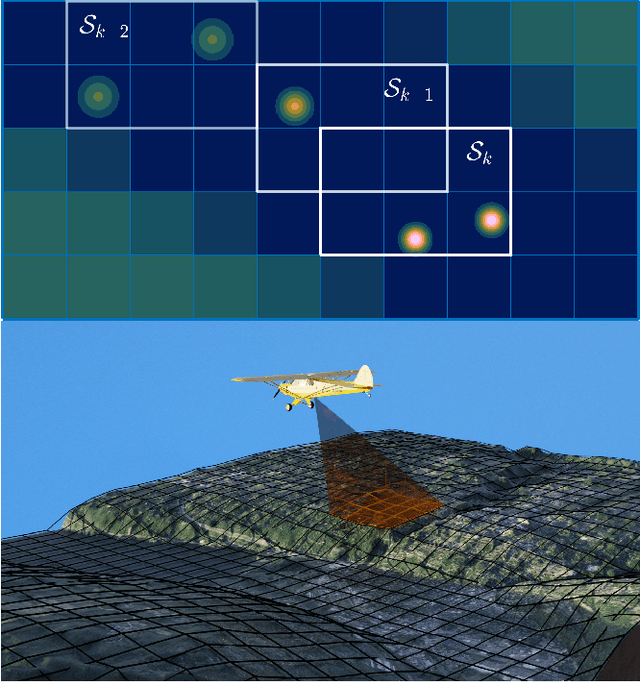

Information driven control can be used to develop intelligent sensors that can optimize their measurement value based on environmental feedback. In object tracking applications, sensor actions are chosen based on the expected reduction in uncertainty also known as information gain. Random finite set (RFS) theory provides a formalism for quantifying and estimating information gain in multi-object tracking problems. However, estimating information gain in these applications remains computationally challenging. This paper presents a new tractable approximation of the RFS expected information gain applicable to sensor control for multi-object search and tracking. Unlike existing RFS approaches, the approximation presented in this paper accounts for noisy measurements, missed detections, false alarms, and object appearance/disappearance. The effectiveness of the information driven sensor control is demonstrated through a multi-vehicle search-while-tracking experiment using real video data from a remote optical sensor.