 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeuristic Satisficing Inferential Decision Making in Human and Robot Active Perception
Sep 14, 2023



Inferential decision-making algorithms typically assume that an underlying probabilistic model of decision alternatives and outcomes may be learned a priori or online. Furthermore, when applied to robots in real-world settings they often perform unsatisfactorily or fail to accomplish the necessary tasks because this assumption is violated and/or they experience unanticipated external pressures and constraints. Cognitive studies presented in this and other papers show that humans cope with complex and unknown settings by modulating between near-optimal and satisficing solutions, including heuristics, by leveraging information value of available environmental cues that are possibly redundant. Using the benchmark inferential decision problem known as ``treasure hunt", this paper develops a general approach for investigating and modeling active perception solutions under pressure. By simulating treasure hunt problems in virtual worlds, our approach learns generalizable strategies from high performers that, when applied to robots, allow them to modulate between optimal and heuristic solutions on the basis of external pressures and probabilistic models, if and when available. The result is a suite of active perception algorithms for camera-equipped robots that outperform treasure-hunt solutions obtained via cell decomposition, information roadmap, and information potential algorithms, in both high-fidelity numerical simulations and physical experiments. The effectiveness of the new active perception strategies is demonstrated under a broad range of unanticipated conditions that cause existing algorithms to fail to complete the search for treasures, such as unmodelled time constraints, resource constraints, and adverse weather (fog).
Synthetic Sonar Image Simulation with Various Seabed Conditions for Automatic Target Recognition
Oct 19, 2022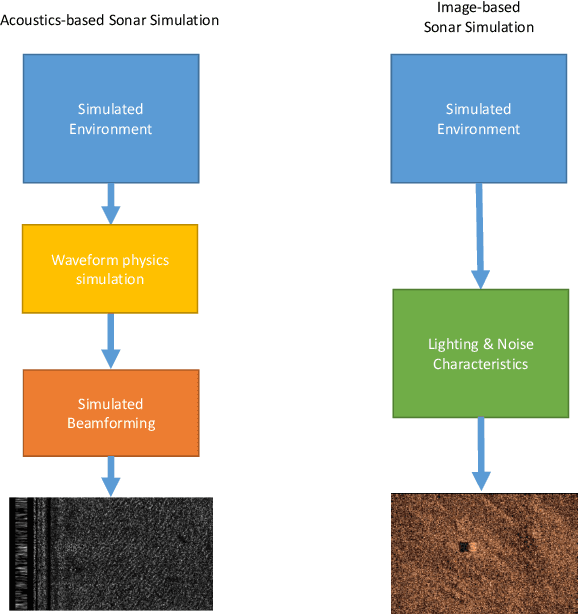
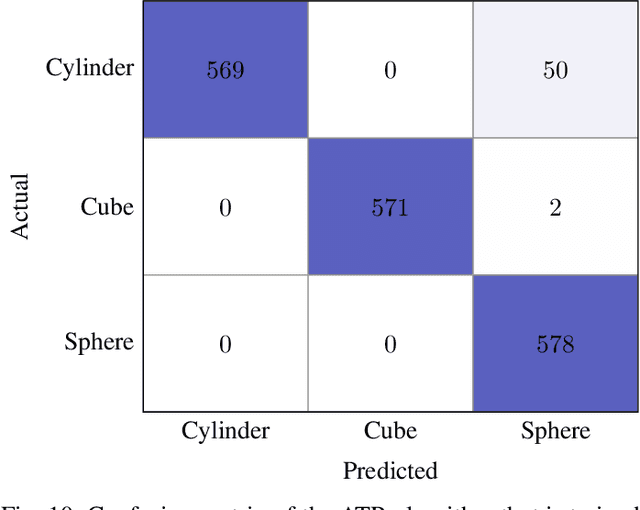
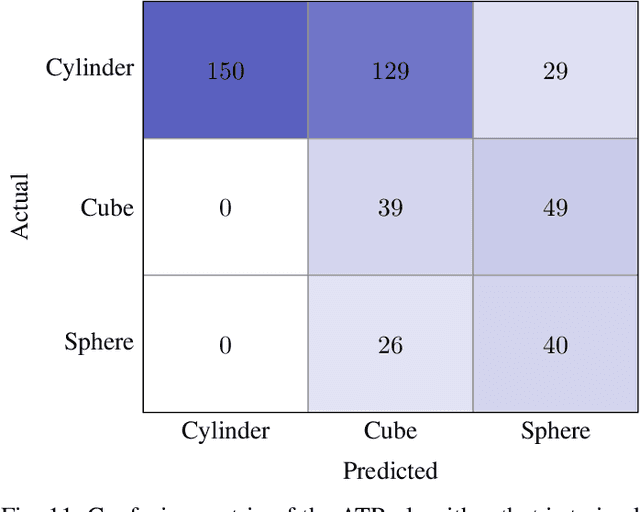
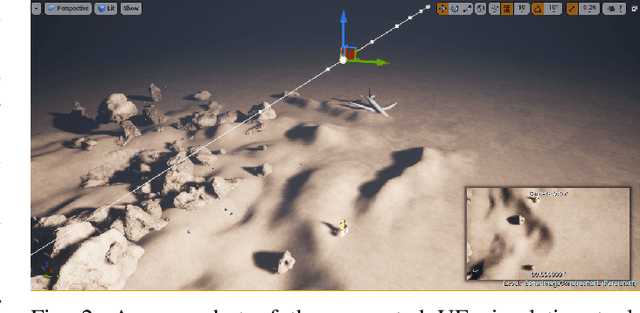
We propose a novel method to generate underwater object imagery that is acoustically compliant with that generated by side-scan sonar using the Unreal Engine. We describe the process to develop, tune, and generate imagery to provide representative images for use in training automated target recognition (ATR) and machine learning algorithms. The methods provide visual approximations for acoustic effects such as back-scatter noise and acoustic shadow, while allowing fast rendering with C++ actor in UE for maximizing the size of potential ATR training datasets. Additionally, we provide analysis of its utility as a replacement for actual sonar imagery or physics-based sonar data.
Split Happens! Imprecise and Negative Information in Gaussian Mixture Random Finite Set Filtering
Jul 22, 2022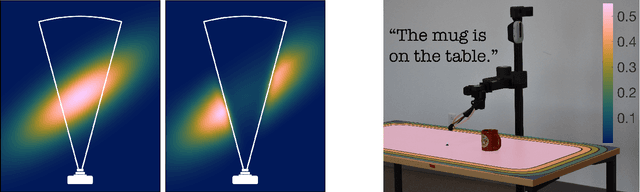
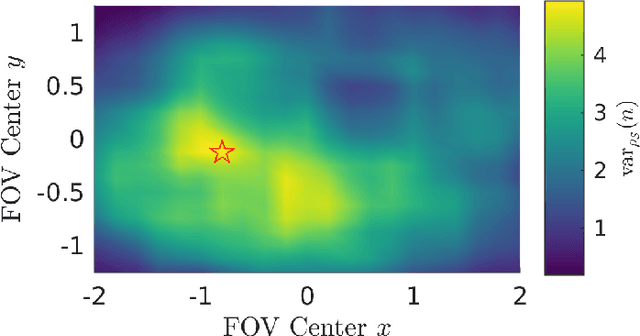
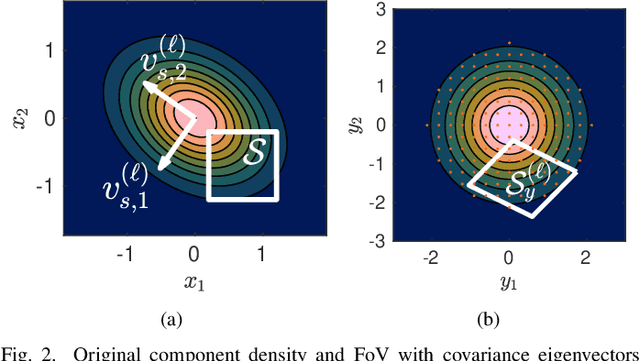

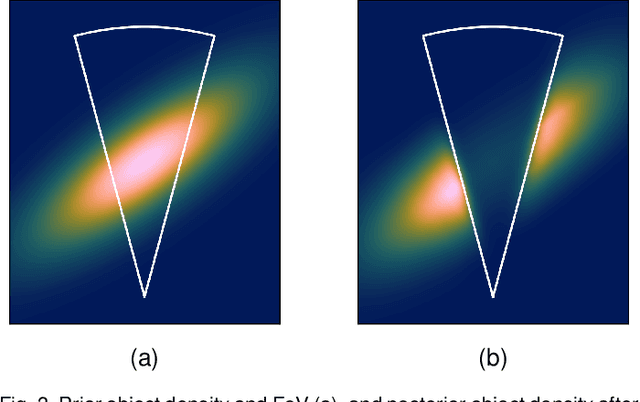
In object tracking and state estimation problems, ambiguous evidence such as imprecise measurements and the absence of detections can contain valuable information and thus be leveraged to further refine the probabilistic belief state. In particular, knowledge of a sensor's bounded field-of-view can be exploited to incorporate evidence of where an object was not observed. This paper presents a systematic approach for incorporating knowledge of the field-of-view geometry and position and object inclusion/exclusion evidence into object state densities and random finite set multi-object cardinality distributions. The resulting state estimation problem is nonlinear and solved using a new Gaussian mixture approximation based on recursive component splitting. Based on this approximation, a novel Gaussian mixture Bernoulli filter for imprecise measurements is derived and demonstrated in a tracking problem using only natural language statements as inputs. This paper also considers the relationship between bounded fields-of-view and cardinality distributions for a representative selection of multi-object distributions, which can be used for sensor planning, as is demonstrated through a problem involving a multi-Bernoulli process with up to one-hundred potential objects.
Cell Multi-Bernoulli Sensor Control for Multi-object Search-While-Tracking
Aug 25, 2021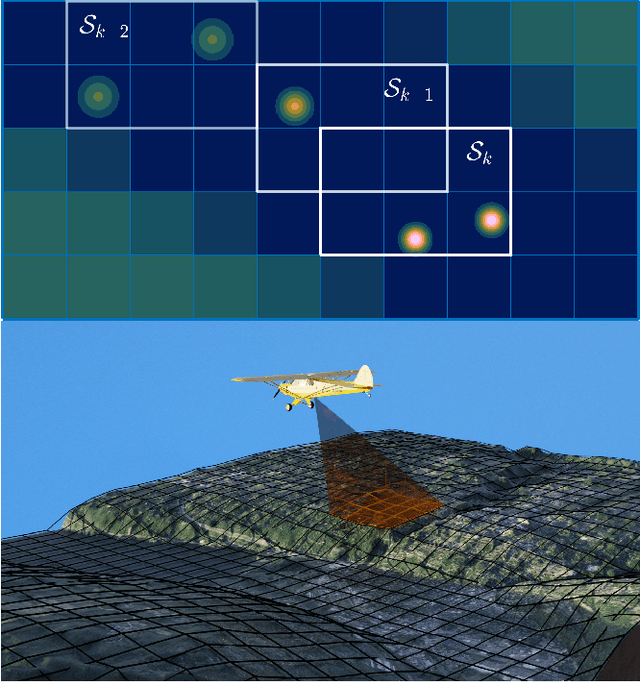

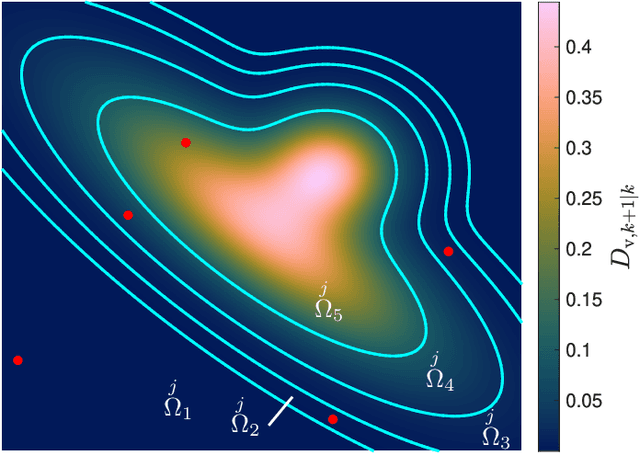
Information driven control can be used to develop intelligent sensors that can optimize their measurement value based on environmental feedback. In object tracking applications, sensor actions are chosen based on the expected reduction in uncertainty also known as information gain. Random finite set (RFS) theory provides a formalism for quantifying and estimating information gain in multi-object tracking problems. However, estimating information gain in these applications remains computationally challenging. This paper presents a new tractable approximation of the RFS expected information gain applicable to sensor control for multi-object search and tracking. Unlike existing RFS approaches, the approximation presented in this paper accounts for noisy measurements, missed detections, false alarms, and object appearance/disappearance. The effectiveness of the information driven sensor control is demonstrated through a multi-vehicle search-while-tracking experiment using real video data from a remote optical sensor.
Rumor-robust Decentralized Gaussian Process Learning, Fusion, and Planning for Modeling Multiple Moving Targets
Sep 13, 2020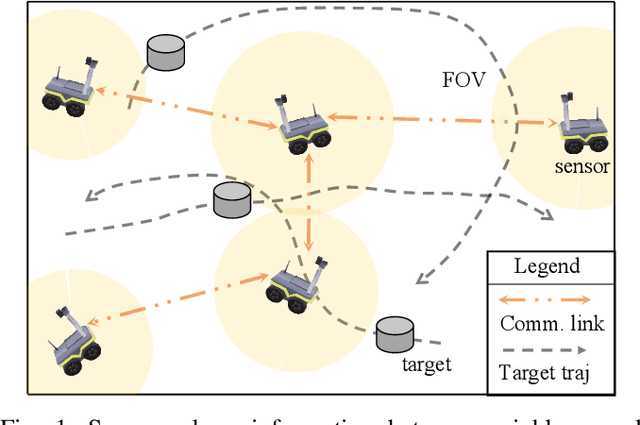

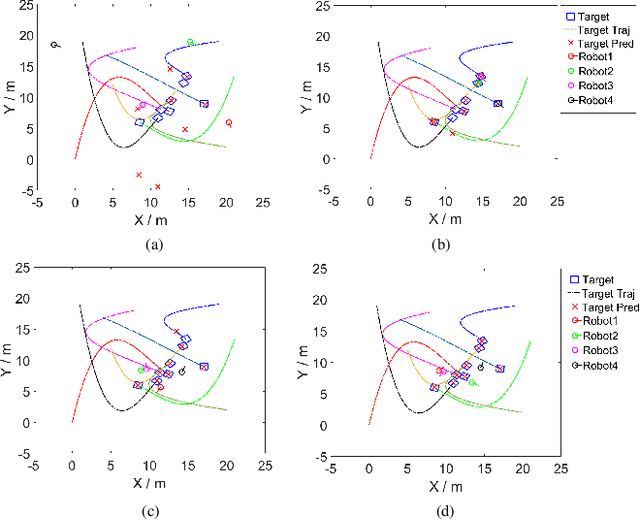
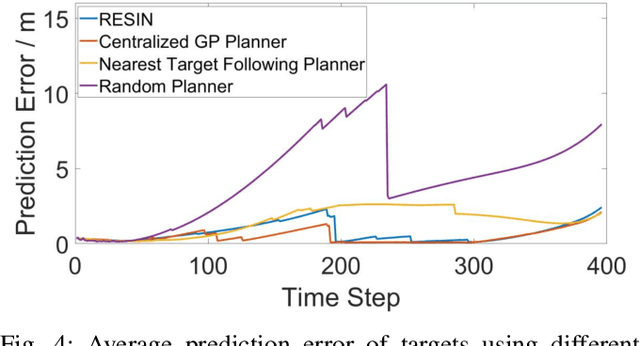
This paper presents a decentralized Gaussian Process (GP) learning, fusion, and planning (RESIN) formalism for mobile sensor networks to actively learn target motion models. RESIN is characterized by both computational and communication efficiency, and the robustness to rumor propagation in sensor networks. By using the weighted exponential product rule and the Chernoff information, a rumor-robust decentralized GP fusion approach is developed to generate a globally consistent target trajectory prediction from local GP models. A decentralized information-driven path planning approach is then proposed for mobile sensors to generate informative sensing paths. A novel, constant-sized information sharing strategy is developed for path coordination between sensors, and an analytical objective function is derived that significantly reduces the computational complexity of the path planning. The effectiveness of RESIN is demonstrated in various numerical simulations.