 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeuristic Satisficing Inferential Decision Making in Human and Robot Active Perception
Sep 14, 2023



Inferential decision-making algorithms typically assume that an underlying probabilistic model of decision alternatives and outcomes may be learned a priori or online. Furthermore, when applied to robots in real-world settings they often perform unsatisfactorily or fail to accomplish the necessary tasks because this assumption is violated and/or they experience unanticipated external pressures and constraints. Cognitive studies presented in this and other papers show that humans cope with complex and unknown settings by modulating between near-optimal and satisficing solutions, including heuristics, by leveraging information value of available environmental cues that are possibly redundant. Using the benchmark inferential decision problem known as ``treasure hunt", this paper develops a general approach for investigating and modeling active perception solutions under pressure. By simulating treasure hunt problems in virtual worlds, our approach learns generalizable strategies from high performers that, when applied to robots, allow them to modulate between optimal and heuristic solutions on the basis of external pressures and probabilistic models, if and when available. The result is a suite of active perception algorithms for camera-equipped robots that outperform treasure-hunt solutions obtained via cell decomposition, information roadmap, and information potential algorithms, in both high-fidelity numerical simulations and physical experiments. The effectiveness of the new active perception strategies is demonstrated under a broad range of unanticipated conditions that cause existing algorithms to fail to complete the search for treasures, such as unmodelled time constraints, resource constraints, and adverse weather (fog).
Mapping Motor Cortex Stimulation to Muscle Responses: A Deep Neural Network Modeling Approach
Feb 14, 2020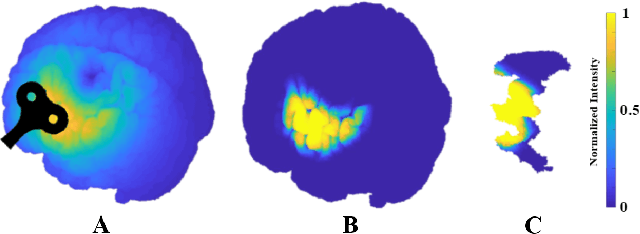

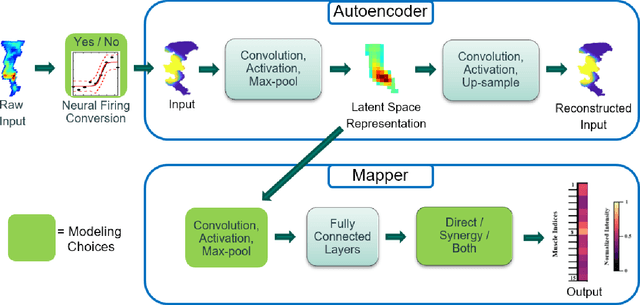

A deep neural network (DNN) that can reliably model muscle responses from corresponding brain stimulation has the potential to increase knowledge of coordinated motor control for numerous basic science and applied use cases. Such cases include the understanding of abnormal movement patterns due to neurological injury from stroke, and stimulation based interventions for neurological recovery such as paired associative stimulation. In this work, potential DNN models are explored and the one with the minimum squared errors is recommended for the optimal performance of the M2M-Net, a network that maps transcranial magnetic stimulation of the motor cortex to corresponding muscle responses, using: a finite element simulation, an empirical neural response profile, a convolutional autoencoder, a separate deep network mapper, and recordings of multi-muscle activation. We discuss the rationale behind the different modeling approaches and architectures, and contrast their results. Additionally, to obtain a comparative insight of the trade-off between complexity and performance analysis, we explore different techniques, including the extension of two classical information criteria for M2M-Net. Finally, we find that the model analogous to mapping the motor cortex stimulation to a combination of direct and synergistic connection to the muscles performs the best, when the neural response profile is used at the input.