 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRumor-robust Decentralized Gaussian Process Learning, Fusion, and Planning for Modeling Multiple Moving Targets
Paper and Code
Sep 13, 2020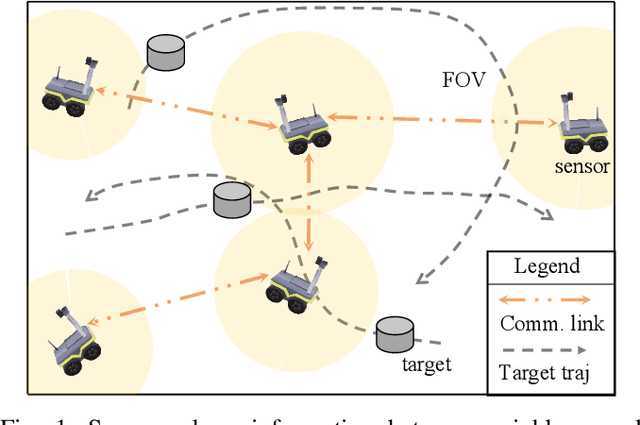

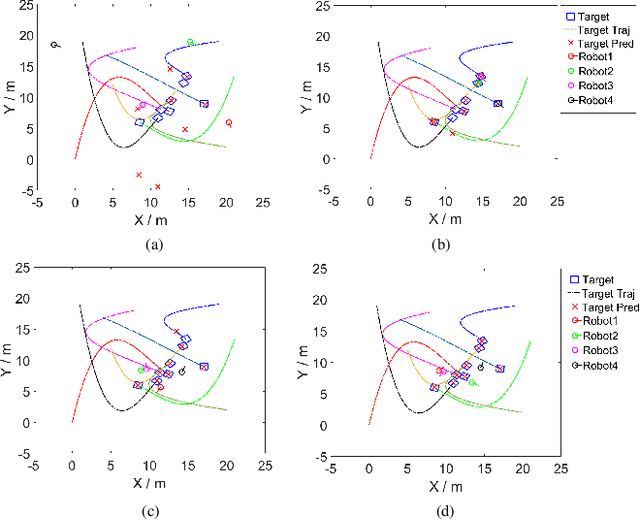
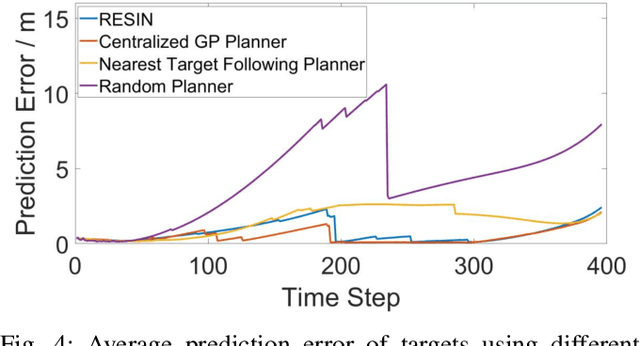
This paper presents a decentralized Gaussian Process (GP) learning, fusion, and planning (RESIN) formalism for mobile sensor networks to actively learn target motion models. RESIN is characterized by both computational and communication efficiency, and the robustness to rumor propagation in sensor networks. By using the weighted exponential product rule and the Chernoff information, a rumor-robust decentralized GP fusion approach is developed to generate a globally consistent target trajectory prediction from local GP models. A decentralized information-driven path planning approach is then proposed for mobile sensors to generate informative sensing paths. A novel, constant-sized information sharing strategy is developed for path coordination between sensors, and an analytical objective function is derived that significantly reduces the computational complexity of the path planning. The effectiveness of RESIN is demonstrated in various numerical simulations.