 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmPRM: Probabilistic Roadmap Motion Planning for Swarm Robotic Systems
Paper and Code
Feb 26, 2024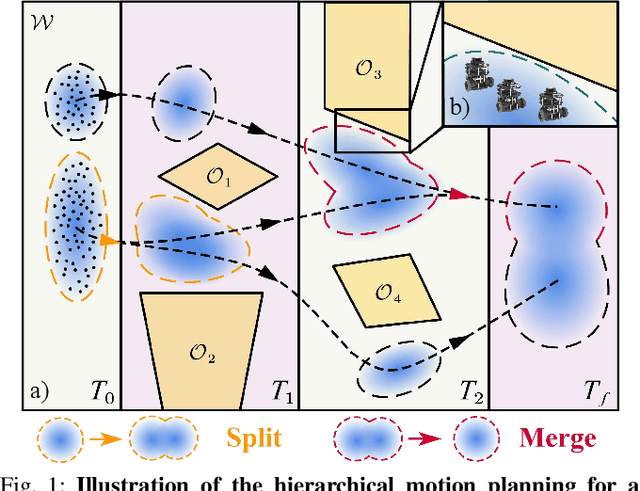
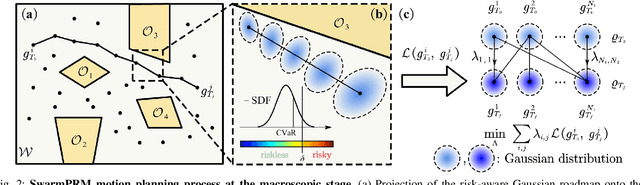
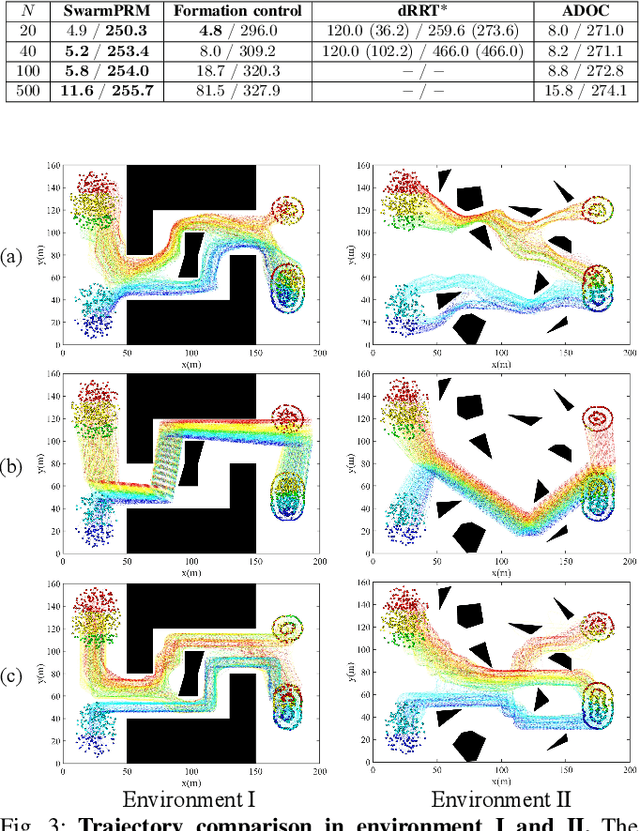
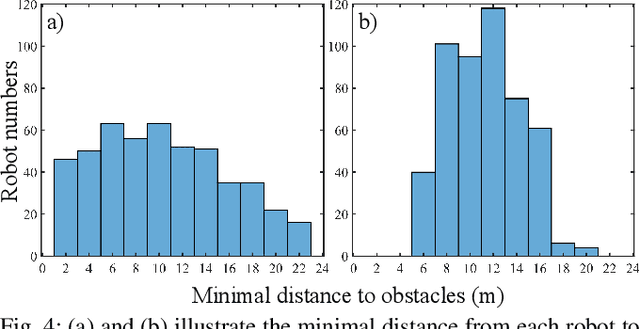
Swarm robotic systems consisting of large-scale cooperative agents hold promise for performing autonomous tasks in diverse fields. However, existing planning strategies for swarm robotic systems often encounter a trade-off between scalability and solution quality. We introduce here SwarmPRM, a hierarchical, highly scalable, computationally efficient, and risk-aware sampling-based motion planning approach for swarm robotic systems, which is asymptotically optimal under mild assumptions. We employ probability density functions (PDFs) to represent the swarm's macroscopic state and utilize optimal mass transport (OMT) theory to measure the swarm's cost to go. A risk-aware Gaussian roadmap is constructed wherein each node encapsulates a distinct PDF and conditional-value-at-risk (CVaR) is employed to assess the collision risk, facilitating the generation of macroscopic PDFs in Wasserstein-GMM space. Extensive simulations demonstrate that the proposed approach outperforms state-of-the-art methods in terms of computational efficiency and the average travelling distance.