 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarmDiff: Swarm Robotic Trajectory Planning in Cluttered Environments via Diffusion Transformer
May 21, 2025Swarm robotic trajectory planning faces challenges in computational efficiency, scalability, and safety, particularly in complex, obstacle-dense environments. To address these issues, we propose SwarmDiff, a hierarchical and scalable generative framework for swarm robots. We model the swarm's macroscopic state using Probability Density Functions (PDFs) and leverage conditional diffusion models to generate risk-aware macroscopic trajectory distributions, which then guide the generation of individual robot trajectories at the microscopic level. To ensure a balance between the swarm's optimal transportation and risk awareness, we integrate Wasserstein metrics and Conditional Value at Risk (CVaR). Additionally, we introduce a Diffusion Transformer (DiT) to improve sampling efficiency and generation quality by capturing long-range dependencies. Extensive simulations and real-world experiments demonstrate that SwarmDiff outperforms existing methods in computational efficiency, trajectory validity, and scalability, making it a reliable solution for swarm robotic trajectory planning.
SwarmCVT: Centroidal Voronoi Tessellation-Based Path Planning for Very-Large-Scale Robotics
Oct 03, 2024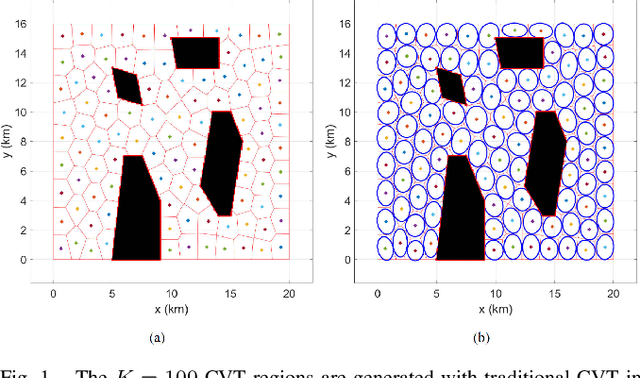

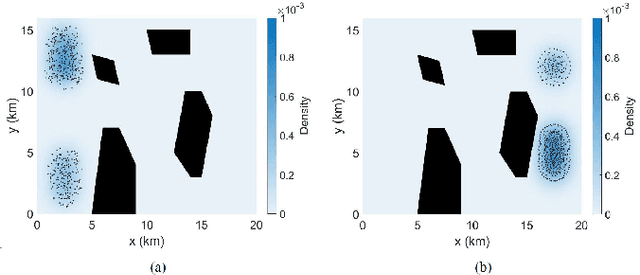
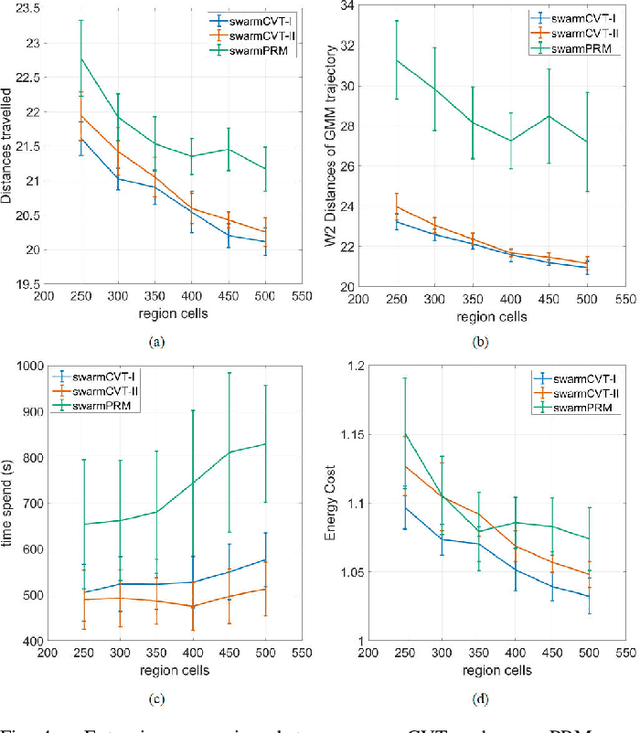
Swarm robotics, or very large-scale robotics (VLSR), has many meaningful applications for complicated tasks. However, the complexity of motion control and energy costs stack up quickly as the number of robots increases. In addressing this problem, our previous studies have formulated various methods employing macroscopic and microscopic approaches. These methods enable microscopic robots to adhere to a reference Gaussian mixture model (GMM) distribution observed at the macroscopic scale. As a result, optimizing the macroscopic level will result in an optimal overall result. However, all these methods require systematic and global generation of Gaussian components (GCs) within obstacle-free areas to construct the GMM trajectories. This work utilizes centroidal Voronoi tessellation to generate GCs methodically. Consequently, it demonstrates performance improvement while also ensuring consistency and reliability.
ROVER: Risk-Aware Swarm Robotics MOtion Planner Using Conditional ValuE at Risk
Feb 26, 2024



The field of swarm robotics has attracted considerable interest for its capacity to complete intricate and synchronized tasks. Existing methodologies for motion planning within swarm robotic systems mainly encounter difficulties in scalability and safety guarantee. To address these two limitations, we propose a Risk-aware swarm mOtion planner using conditional ValuE at Risk (ROVER) that systematically modulates the safety and conservativeness and navigates the swarm to the target area through cluttered environments. Our approach formulates a finite-time model predictive control (FTMPC) problem predicated upon the macroscopic state of the robot swarm represented by Gaussian Mixture Model (GMM) and integrates conditional value-at-risk (CVaR) to avoid collision. We leverage the linearized Signed Distance Function for the efficient computation of CVaR concerning the proximity between the robot swarm to obstacles. The key component of this method is implementing CVaR constraint under GMM uncertainty in the FTMPC to measure the collision risk that a robot swarm faces. However, the non-convex constrained FTMPC is nontrival to solve. To navigate this complexity, we develop a computationally tractable strategy through 1) an explicit linear approximation of the CVaR constraint; and 2) a sequential quadratic programming formulation. Simulations and comparisons with other approaches demonstrate the effectiveness of the proposed method in flexibility, scalability, and risk mitigation.
SwarmPRM: Probabilistic Roadmap Motion Planning for Swarm Robotic Systems
Feb 26, 2024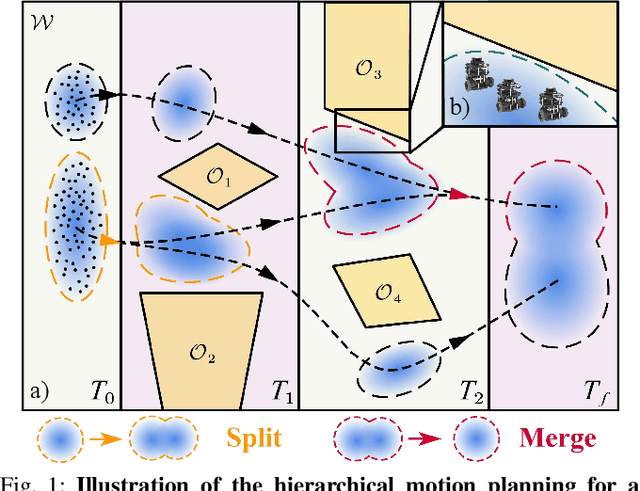
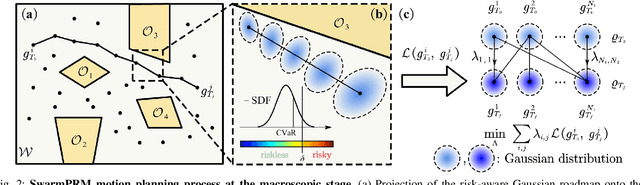
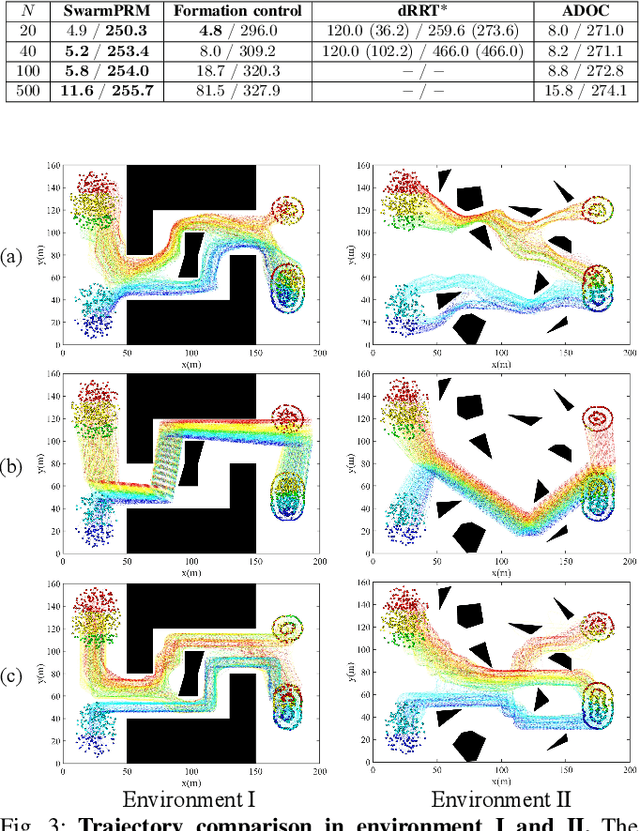
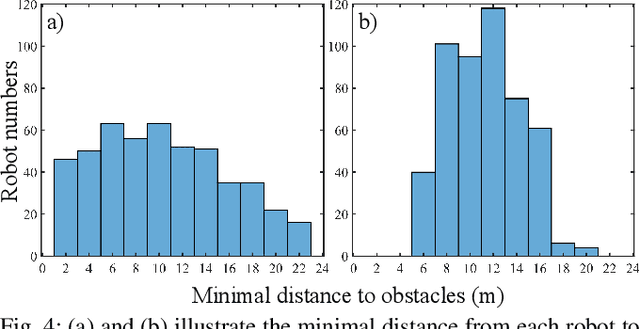
Swarm robotic systems consisting of large-scale cooperative agents hold promise for performing autonomous tasks in diverse fields. However, existing planning strategies for swarm robotic systems often encounter a trade-off between scalability and solution quality. We introduce here SwarmPRM, a hierarchical, highly scalable, computationally efficient, and risk-aware sampling-based motion planning approach for swarm robotic systems, which is asymptotically optimal under mild assumptions. We employ probability density functions (PDFs) to represent the swarm's macroscopic state and utilize optimal mass transport (OMT) theory to measure the swarm's cost to go. A risk-aware Gaussian roadmap is constructed wherein each node encapsulates a distinct PDF and conditional-value-at-risk (CVaR) is employed to assess the collision risk, facilitating the generation of macroscopic PDFs in Wasserstein-GMM space. Extensive simulations demonstrate that the proposed approach outperforms state-of-the-art methods in terms of computational efficiency and the average travelling distance.
Informative Path Planning of Autonomous Vehicle for Parking Occupancy Estimation
Aug 01, 2023Parking occupancy estimation holds significant potential in facilitating parking resource management and mitigating traffic congestion. Existing approaches employ robotic systems to detect the occupancy status of individual parking spaces and primarily focus on enhancing detection accuracy through perception pipelines. However, these methods often overlook the crucial aspect of robot path planning, which can hinder the accurate estimation of the entire parking area. In light of these limitations, we introduce the problem of informative path planning for parking occupancy estimation using autonomous vehicles and formulate it as a Partially Observable Markov Decision Process (POMDP) task. Then, we develop an occupancy state transition model and introduce a Bayes filter to estimate occupancy based on noisy sensor measurements. Subsequently, we propose the Monte Carlo Bayes Filter Tree, a computationally efficient algorithm that leverages progressive widening to generate informative paths. We demonstrate that the proposed approach outperforms the benchmark methods in diverse simulation environments, effectively striking a balance between optimality and computational efficiency.