 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOcclusion-Aware Consistent Model Predictive Control for Robot Navigation in Occluded Obstacle-Dense Environments
Mar 06, 2025



Ensuring safety and motion consistency for robot navigation in occluded, obstacle-dense environments is a critical challenge. In this context, this study presents an occlusion-aware Consistent Model Predictive Control (CMPC) strategy. To account for the occluded obstacles, it incorporates adjustable risk regions that represent their potential future locations. Subsequently, dynamic risk boundary constraints are developed online to ensure safety. The CMPC then constructs multiple locally optimal trajectory branches (each tailored to different risk regions) to balance between exploitation and exploration. A shared consensus trunk is generated to ensure smooth transitions between branches without significant velocity fluctuations, further preserving motion consistency. To facilitate high computational efficiency and ensure coordination across local trajectories, we use the alternating direction method of multipliers (ADMM) to decompose the CMPC into manageable sub-problems for parallel solving. The proposed strategy is validated through simulation and real-world experiments on an Ackermann-steering robot platform. The results demonstrate the effectiveness of the proposed CMPC strategy through comparisons with baseline approaches in occluded, obstacle-dense environments.
Occlusion-Aware Contingency Safety-Critical Planning for Autonomous Vehicles
Feb 10, 2025



Ensuring safe driving while maintaining travel efficiency for autonomous vehicles in dynamic and occluded environments is a critical challenge. This paper proposes an occlusion-aware contingency safety-critical planning approach for real-time autonomous driving in such environments. Leveraging reachability analysis for risk assessment, forward reachable sets of occluded phantom vehicles are computed to quantify dynamic velocity boundaries. These velocity boundaries are incorporated into a biconvex nonlinear programming (NLP) formulation, enabling simultaneous optimization of exploration and fallback trajectories within a receding horizon planning framework. To facilitate real-time optimization and ensure coordination between trajectories, we employ the consensus alternating direction method of multipliers (ADMM) to decompose the biconvex NLP problem into low-dimensional convex subproblems. The effectiveness of the proposed approach is validated through simulation studies and real-world experiments in occluded intersections. Experimental results demonstrate enhanced safety and improved travel efficiency, enabling real-time safe trajectory generation in dynamic occluded intersections under varying obstacle conditions. A video showcasing the experimental results is available at https://youtu.be/CHayG7NChqM.
Safe and Real-Time Consistent Planning for Autonomous Vehicles in Partially Observed Environments via Parallel Consensus Optimization
Sep 16, 2024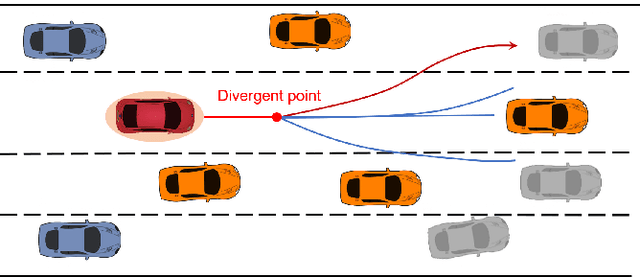
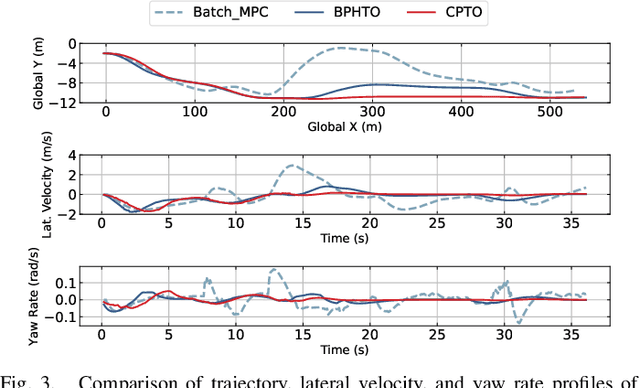
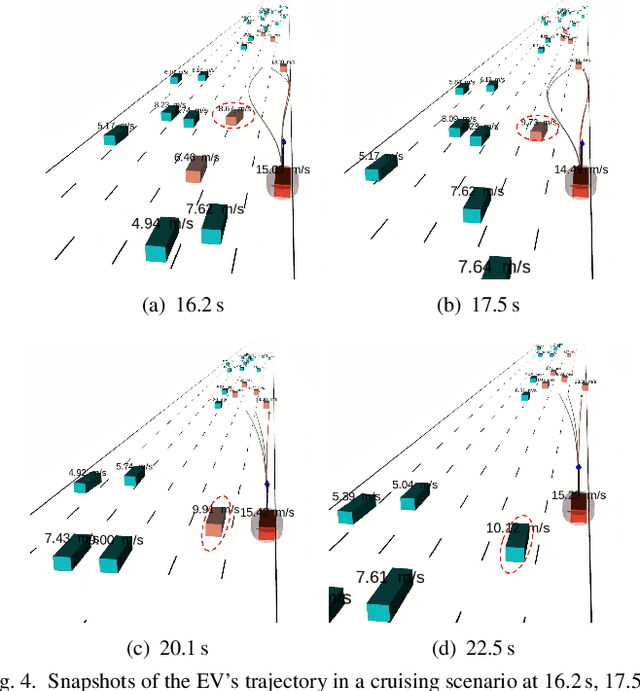
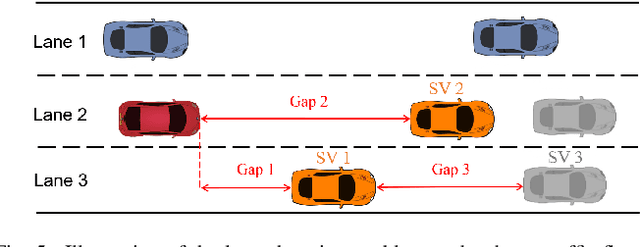
Ensuring safety and driving consistency is a significant challenge for autonomous vehicles operating in partially observed environments. This work introduces a consistent parallel trajectory optimization (CPTO) approach to enable safe and consistent driving in dense obstacle environments with perception uncertainties. Utilizing discrete-time barrier function theory, we develop a consensus safety barrier module that ensures reliable safety coverage within the spatiotemporal trajectory space across potential obstacle configurations. Following this, a bi-convex parallel trajectory optimization problem is derived that facilitates decomposition into a series of low-dimensional quadratic programming problems to accelerate computation. By leveraging the consensus alternating direction method of multipliers (ADMM) for parallel optimization, each generated candidate trajectory corresponds to a possible environment configuration while sharing a common consensus trajectory segment. This ensures driving safety and consistency when executing the consensus trajectory segment for the ego vehicle in real time. We validate our CPTO framework through extensive comparisons with state-of-the-art baselines across multiple driving tasks in partially observable environments. Our results demonstrate improved safety and consistency using both synthetic and real-world traffic datasets.