 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Real-Time Consistent Planning for Autonomous Vehicles in Partially Observed Environments via Parallel Consensus Optimization
Paper and Code
Sep 16, 2024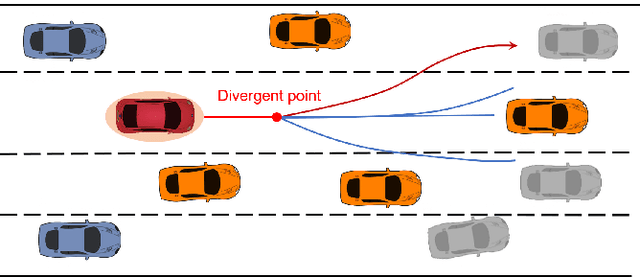
Ensuring safety and driving consistency is a significant challenge for autonomous vehicles operating in partially observed environments. This work introduces a consistent parallel trajectory optimization (CPTO) approach to enable safe and consistent driving in dense obstacle environments with perception uncertainties. Utilizing discrete-time barrier function theory, we develop a consensus safety barrier module that ensures reliable safety coverage within the spatiotemporal trajectory space across potential obstacle configurations. Following this, a bi-convex parallel trajectory optimization problem is derived that facilitates decomposition into a series of low-dimensional quadratic programming problems to accelerate computation. By leveraging the consensus alternating direction method of multipliers (ADMM) for parallel optimization, each generated candidate trajectory corresponds to a possible environment configuration while sharing a common consensus trajectory segment. This ensures driving safety and consistency when executing the consensus trajectory segment for the ego vehicle in real time. We validate our CPTO framework through extensive comparisons with state-of-the-art baselines across multiple driving tasks in partially observable environments. Our results demonstrate improved safety and consistency using both synthetic and real-world traffic datasets.