 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Cartesian Shortcut: Re-evaluate Vision Reasoning in Polar Coordinate Space
May 11, 2026As current Multimodal Large Language Models rapidly saturate canonical visual reasoning benchmarks, a key question emerges: do these strong scores genuinely reflect robust visual understanding? We identify a pervasive vulnerability, the \textbf{Cartesian Shortcut}: visual reasoning benchmarks prevalently build on orthogonal grid-based layouts that can be readily discretized into explicit textual coordinates. Models systematically exploit this property, heavily leveraging text-based deductive reasoning to assist visual problem-solving. To systematically dismantle this shortcut, we introduce \textbf{Polaris-Bench}, which re-formulates 53 visual reasoning tasks in Polar coordinate space with paired Cartesian counterparts as reference, while preserving consistent logical constraints and task semantics -- thus fundamentally breaking the orthogonal prior that models exploit. Comprehensive evaluation across $14$ state-of-the-art MLLMs reveals that frontier models achieving $70$--$83\%$ on Cartesian layouts collapse to $31$--$39\%$ on Polar equivalents, with degradation persisting even under complete logical equivalence. Moreover, reasoning gains observed on Cartesian layouts are severely diminished on Polar equivalents. These findings expose a critical deficiency in current MLLMs: the lack of topology-invariant visual reasoning.
Image Generators are Generalist Vision Learners
Apr 22, 2026Recent works show that image and video generators exhibit zero-shot visual understanding behaviors, in a way reminiscent of how LLMs develop emergent capabilities of language understanding and reasoning from generative pretraining. While it has long been conjectured that the ability to create visual content implies an ability to understand it, there has been limited evidence that generative vision models have developed strong understanding capabilities. In this work, we demonstrate that image generation training serves a role similar to LLM pretraining, and lets models learn powerful and general visual representations that enable SOTA performance on various vision tasks. We introduce Vision Banana, a generalist model built by instruction-tuning Nano Banana Pro (NBP) on a mixture of its original training data alongside a small amount of vision task data. By parameterizing the output space of vision tasks as RGB images, we seamlessly reframe perception as image generation. Our generalist model, Vision Banana, achieves SOTA results on a variety of vision tasks involving both 2D and 3D understanding, beating or rivaling zero-shot domain-specialists, including Segment Anything Model 3 on segmentation tasks, and the Depth Anything series on metric depth estimation. We show that these results can be achieved with lightweight instruction-tuning without sacrificing the base model's image generation capabilities. The superior results suggest that image generation pretraining is a generalist vision learner. It also shows that image generation serves as a unified and universal interface for vision tasks, similar to text generation's role in language understanding and reasoning. We could be witnessing a major paradigm shift for computer vision, where generative vision pretraining takes a central role in building Foundational Vision Models for both generation and understanding.
TIPSv2: Advancing Vision-Language Pretraining with Enhanced Patch-Text Alignment
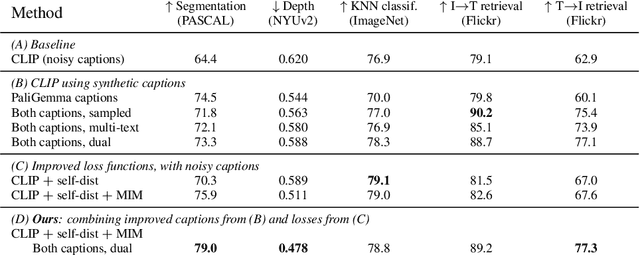
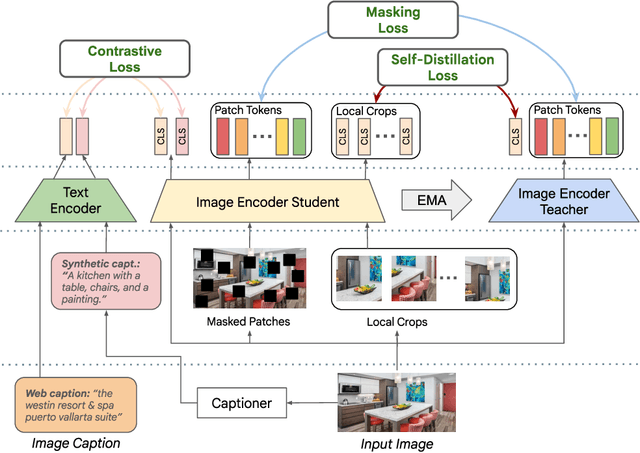
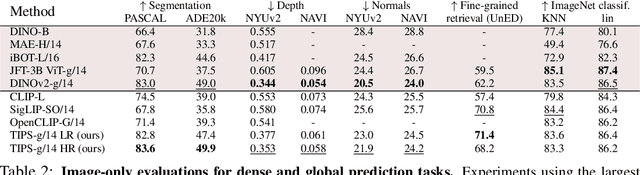
Apr 13, 2026Recent progress in vision-language pretraining has enabled significant improvements to many downstream computer vision applications, such as classification, retrieval, segmentation and depth prediction. However, a fundamental capability that these models still struggle with is aligning dense patch representations with text embeddings of corresponding concepts. In this work, we investigate this critical issue and propose novel techniques to enhance this capability in foundational vision-language models. First, we reveal that a patch-level distillation procedure significantly boosts dense patch-text alignment -- surprisingly, the patch-text alignment of the distilled student model strongly surpasses that of the teacher model. This observation inspires us to consider modifications to pretraining recipes, leading us to propose iBOT++, an upgrade to the commonly-used iBOT masked image objective, where unmasked tokens also contribute directly to the loss. This dramatically enhances patch-text alignment of pretrained models. Additionally, to improve vision-language pretraining efficiency and effectiveness, we modify the exponential moving average setup in the learning recipe, and introduce a caption sampling strategy to benefit from synthetic captions at different granularities. Combining these components, we develop TIPSv2, a new family of image-text encoder models suitable for a wide range of downstream applications. Through comprehensive experiments on 9 tasks and 20 datasets, we demonstrate strong performance, generally on par with or better than recent vision encoder models. Code and models are released via our project page at https://gdm-tipsv2.github.io/ .
A Benchmark and Knowledge-Grounded Framework for Advanced Multimodal Personalization Study
Feb 22, 2026The powerful reasoning of modern Vision Language Models open a new frontier for advanced personalization study. However, progress in this area is critically hampered by the lack of suitable benchmarks. To address this gap, we introduce Life-Bench, a comprehensive, synthetically generated multimodal benchmark built on simulated user digital footprints. Life-Bench features over questions evaluating a wide spectrum of capabilities, from persona understanding to complex reasoning over historical data. These capabilities expand far beyond prior benchmarks, reflecting the critical demands essential for real-world applications. Furthermore, we propose LifeGraph, an end-to-end framework that organizes personal context into a knowledge graph to facilitate structured retrieval and reasoning. Our experiments on Life-Bench reveal that existing methods falter significantly on complex personalized tasks, exposing a large performance headroom, especially in relational, temporal and aggregative reasoning. While LifeGraph closes this gap by leveraging structured knowledge and demonstrates a promising direction, these advanced personalization tasks remain a critical open challenge, motivating new research in this area.
Robot Learning from a Physical World Model
Nov 10, 2025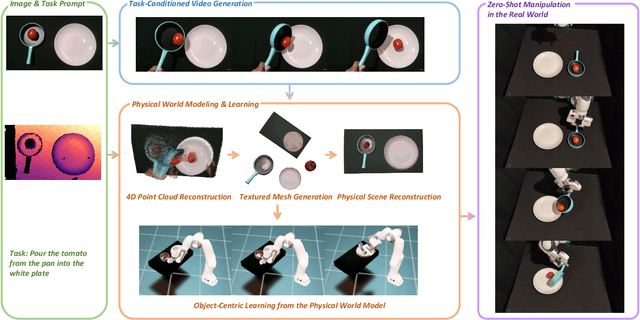
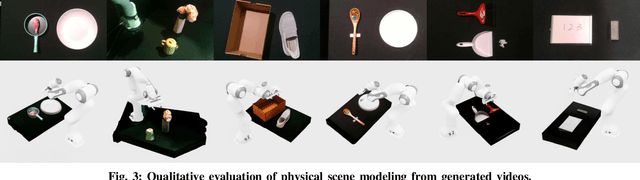
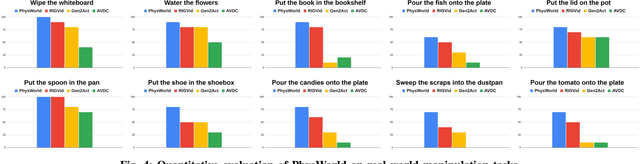
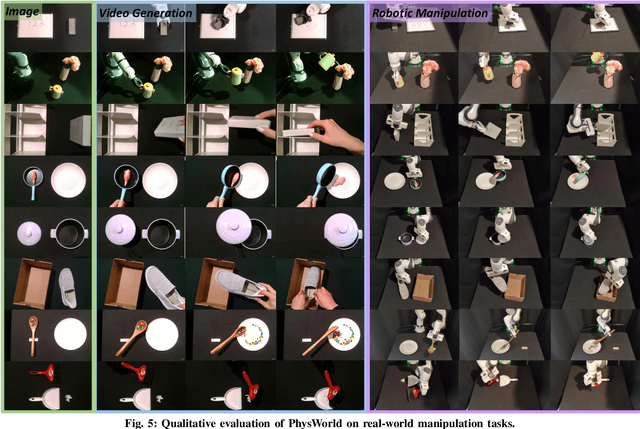
We introduce PhysWorld, a framework that enables robot learning from video generation through physical world modeling. Recent video generation models can synthesize photorealistic visual demonstrations from language commands and images, offering a powerful yet underexplored source of training signals for robotics. However, directly retargeting pixel motions from generated videos to robots neglects physics, often resulting in inaccurate manipulations. PhysWorld addresses this limitation by coupling video generation with physical world reconstruction. Given a single image and a task command, our method generates task-conditioned videos and reconstructs the underlying physical world from the videos, and the generated video motions are grounded into physically accurate actions through object-centric residual reinforcement learning with the physical world model. This synergy transforms implicit visual guidance into physically executable robotic trajectories, eliminating the need for real robot data collection and enabling zero-shot generalizable robotic manipulation. Experiments on diverse real-world tasks demonstrate that PhysWorld substantially improves manipulation accuracy compared to previous approaches. Visit \href{https://pointscoder.github.io/PhysWorld_Web/}{the project webpage} for details.
FirePlace: Geometric Refinements of LLM Common Sense Reasoning for 3D Object Placement
Mar 06, 2025Scene generation with 3D assets presents a complex challenge, requiring both high-level semantic understanding and low-level geometric reasoning. While Multimodal Large Language Models (MLLMs) excel at semantic tasks, their application to 3D scene generation is hindered by their limited grounding on 3D geometry. In this paper, we investigate how to best work with MLLMs in an object placement task. Towards this goal, we introduce a novel framework, FirePlace, that applies existing MLLMs in (1) 3D geometric reasoning and the extraction of relevant geometric details from the 3D scene, (2) constructing and solving geometric constraints on the extracted low-level geometry, and (3) pruning for final placements that conform to common sense. By combining geometric reasoning with real-world understanding of MLLMs, our method can propose object placements that satisfy both geometric constraints as well as high-level semantic common-sense considerations. Our experiments show that these capabilities allow our method to place objects more effectively in complex scenes with intricate geometry, surpassing the quality of prior work.
TIPS: Text-Image Pretraining with Spatial Awareness
Oct 21, 2024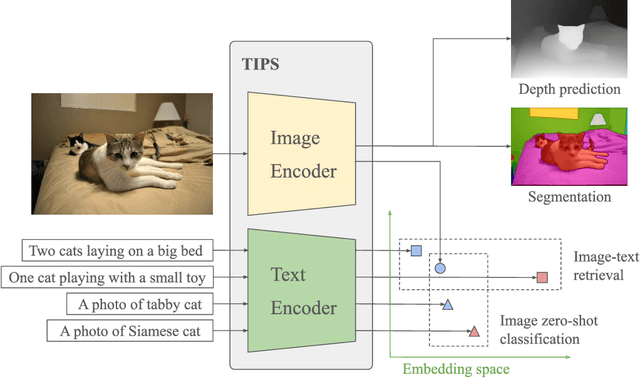
While image-text representation learning has become very popular in recent years, existing models tend to lack spatial awareness and have limited direct applicability for dense understanding tasks. For this reason, self-supervised image-only pretraining is still the go-to method for many dense vision applications (e.g. depth estimation, semantic segmentation), despite the lack of explicit supervisory signals. In this paper, we close this gap between image-text and self-supervised learning, by proposing a novel general-purpose image-text model, which can be effectively used off-the-shelf for dense and global vision tasks. Our method, which we refer to as Text-Image Pretraining with Spatial awareness (TIPS), leverages two simple and effective insights. First, on textual supervision: we reveal that replacing noisy web image captions by synthetically generated textual descriptions boosts dense understanding performance significantly, due to a much richer signal for learning spatially aware representations. We propose an adapted training method that combines noisy and synthetic captions, resulting in improvements across both dense and global understanding tasks. Second, on the learning technique: we propose to combine contrastive image-text learning with self-supervised masked image modeling, to encourage spatial coherence, unlocking substantial enhancements for downstream applications. Building on these two ideas, we scale our model using the transformer architecture, trained on a curated set of public images. Our experiments are conducted on 8 tasks involving 16 datasets in total, demonstrating strong off-the-shelf performance on both dense and global understanding, for several image-only and image-text tasks.
ConDense: Consistent 2D/3D Pre-training for Dense and Sparse Features from Multi-View Images
Aug 30, 2024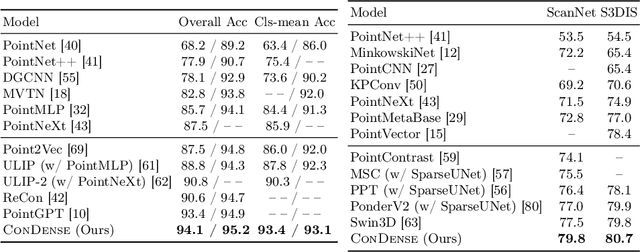
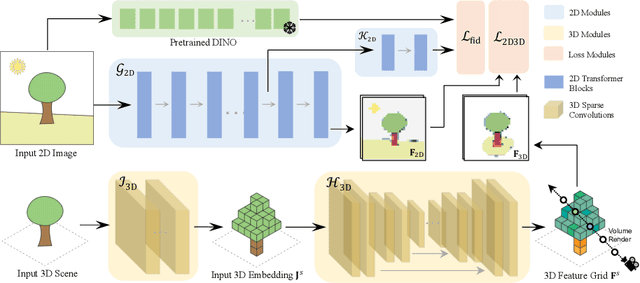
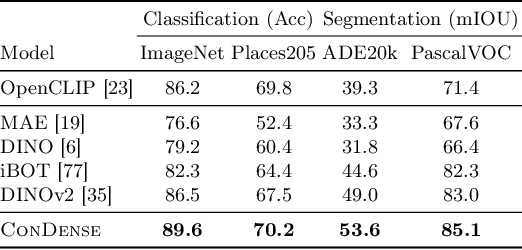
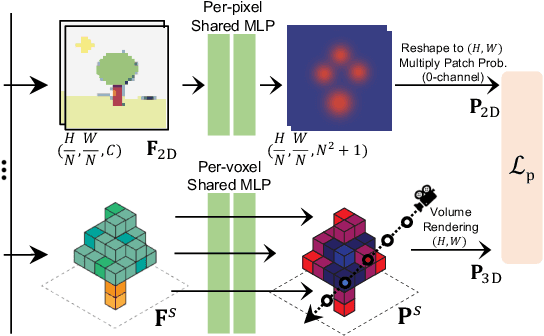
To advance the state of the art in the creation of 3D foundation models, this paper introduces the ConDense framework for 3D pre-training utilizing existing pre-trained 2D networks and large-scale multi-view datasets. We propose a novel 2D-3D joint training scheme to extract co-embedded 2D and 3D features in an end-to-end pipeline, where 2D-3D feature consistency is enforced through a volume rendering NeRF-like ray marching process. Using dense per pixel features we are able to 1) directly distill the learned priors from 2D models to 3D models and create useful 3D backbones, 2) extract more consistent and less noisy 2D features, 3) formulate a consistent embedding space where 2D, 3D, and other modalities of data (e.g., natural language prompts) can be jointly queried. Furthermore, besides dense features, ConDense can be trained to extract sparse features (e.g., key points), also with 2D-3D consistency -- condensing 3D NeRF representations into compact sets of decorated key points. We demonstrate that our pre-trained model provides good initialization for various 3D tasks including 3D classification and segmentation, outperforming other 3D pre-training methods by a significant margin. It also enables, by exploiting our sparse features, additional useful downstream tasks, such as matching 2D images to 3D scenes, detecting duplicate 3D scenes, and querying a repository of 3D scenes through natural language -- all quite efficiently and without any per-scene fine-tuning.
HAMMR: HierArchical MultiModal React agents for generic VQA
Apr 08, 2024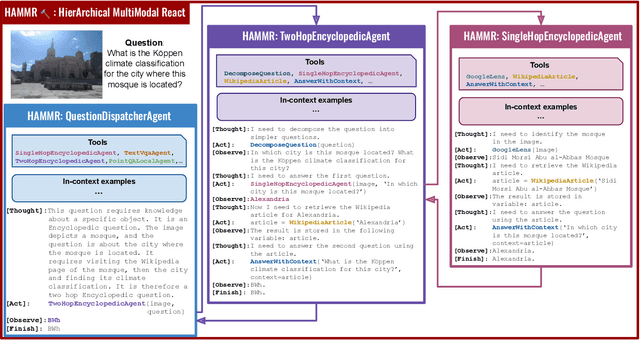
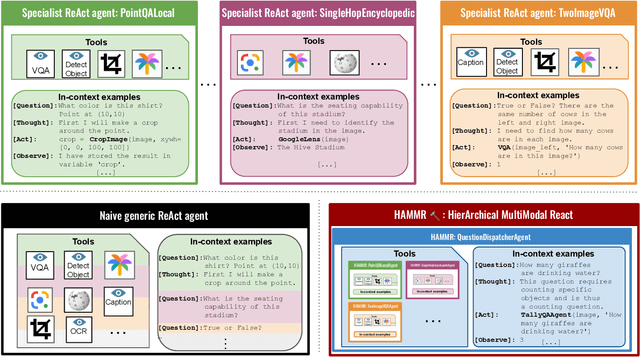
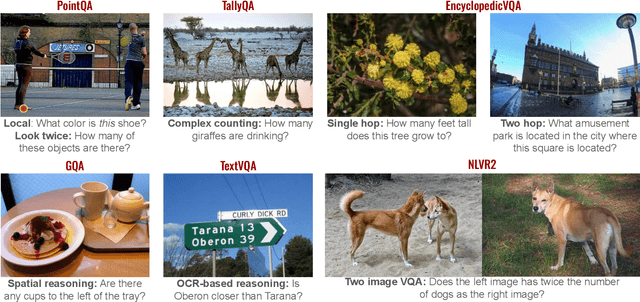
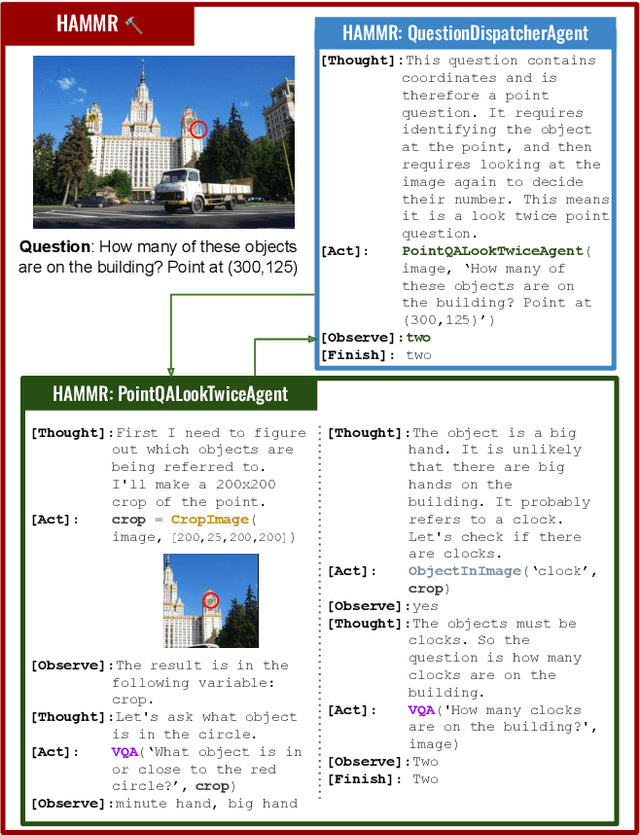
Combining Large Language Models (LLMs) with external specialized tools (LLMs+tools) is a recent paradigm to solve multimodal tasks such as Visual Question Answering (VQA). While this approach was demonstrated to work well when optimized and evaluated for each individual benchmark, in practice it is crucial for the next generation of real-world AI systems to handle a broad range of multimodal problems. Therefore we pose the VQA problem from a unified perspective and evaluate a single system on a varied suite of VQA tasks including counting, spatial reasoning, OCR-based reasoning, visual pointing, external knowledge, and more. In this setting, we demonstrate that naively applying the LLM+tools approach using the combined set of all tools leads to poor results. This motivates us to introduce HAMMR: HierArchical MultiModal React. We start from a multimodal ReAct-based system and make it hierarchical by enabling our HAMMR agents to call upon other specialized agents. This enhances the compositionality of the LLM+tools approach, which we show to be critical for obtaining high accuracy on generic VQA. Concretely, on our generic VQA suite, HAMMR outperforms the naive LLM+tools approach by 19.5%. Additionally, HAMMR achieves state-of-the-art results on this task, outperforming the generic standalone PaLI-X VQA model by 5.0%.
Modeling Collaborator: Enabling Subjective Vision Classification With Minimal Human Effort via LLM Tool-Use
Mar 05, 2024From content moderation to wildlife conservation, the number of applications that require models to recognize nuanced or subjective visual concepts is growing. Traditionally, developing classifiers for such concepts requires substantial manual effort measured in hours, days, or even months to identify and annotate data needed for training. Even with recently proposed Agile Modeling techniques, which enable rapid bootstrapping of image classifiers, users are still required to spend 30 minutes or more of monotonous, repetitive data labeling just to train a single classifier. Drawing on Fiske's Cognitive Miser theory, we propose a new framework that alleviates manual effort by replacing human labeling with natural language interactions, reducing the total effort required to define a concept by an order of magnitude: from labeling 2,000 images to only 100 plus some natural language interactions. Our framework leverages recent advances in foundation models, both large language models and vision-language models, to carve out the concept space through conversation and by automatically labeling training data points. Most importantly, our framework eliminates the need for crowd-sourced annotations. Moreover, our framework ultimately produces lightweight classification models that are deployable in cost-sensitive scenarios. Across 15 subjective concepts and across 2 public image classification datasets, our trained models outperform traditional Agile Modeling as well as state-of-the-art zero-shot classification models like ALIGN, CLIP, CuPL, and large visual question-answering models like PaLI-X.