 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArbor: Explicit Geometric Conditioning for Controllable 3D Asset Generation
Jun 22, 2026Text and image conditioned 3D models now generate convincing assets, but they still offer little direct control over the space an object should occupy or avoid. In authoring, this spatial intent is often known before generation starts. A chair should fit a seating envelope, a prop should leave clearance for motion, or a part should expose a contact surface. Prompts and image views are poor carriers for such constraints, requiring the need for an explicit control interface. We present Arbor, a trainable attachment for text conditioned latent 3D generation. Arbor introduces constraint meshes as a native 3D control interface. The interface uses hull regions where geometry should exist, avoidance regions that should remain empty, and touch regions the object should contact. Unlike completion or whole object scaffold control, these meshes are not target evidence. They are local typed requirements and can include regions where no surface should appear. Arbor keeps this signal as geometry by converting constraint meshes into tokens and learning a routed attachment inside a frozen denoiser. Each latent region can therefore receive the part of the constraint that matters for its spatial location. We evaluate Arbor on automatic and artist curated control benchmarks with hull, avoidance, and touch constraints, and compare the metric trends to a user preference study. Even without dedicated compliance losses, Arbor improves constraint obedience while preserving object quality and variation under fixed constraints.
ReLi3D: Relightable Multi-view 3D Reconstruction with Disentangled Illumination
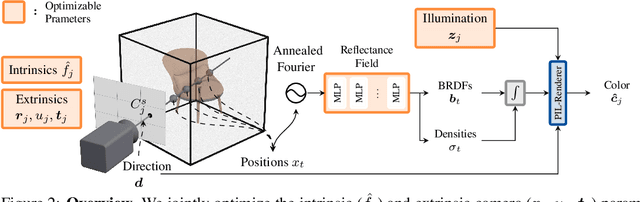
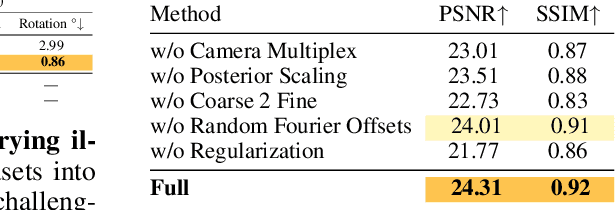
Mar 20, 2026Reconstructing 3D assets from images has long required separate pipelines for geometry reconstruction, material estimation, and illumination recovery, each with distinct limitations and computational overhead. We present ReLi3D, the first unified end-to-end pipeline that simultaneously reconstructs complete 3D geometry, spatially-varying physically-based materials, and environment illumination from sparse multi-view images in under one second. Our key insight is that multi-view constraints can dramatically improve material and illumination disentanglement, a problem that remains fundamentally ill-posed for single-image methods. Key to our approach is the fusion of the multi-view input via a transformer cross-conditioning architecture, followed by a novel unified two-path prediction strategy. The first path predicts the object's structure and appearance, while the second path predicts the environment illumination from image background or object reflections. This, combined with a differentiable Monte Carlo multiple importance sampling renderer, creates an optimal illumination disentanglement training pipeline. In addition, with our mixed domain training protocol, which combines synthetic PBR datasets with real-world RGB captures, we establish generalizable results in geometry, material accuracy, and illumination quality. By unifying previously separate reconstruction tasks into a single feed-forward pass, we enable near-instantaneous generation of complete, relightable 3D assets. Project Page: https://reli3d.jdihlmann.com/
* Project Page: https://reli3d.jdihlmann.com/
Subsurface Scattering for 3D Gaussian Splatting
Aug 22, 2024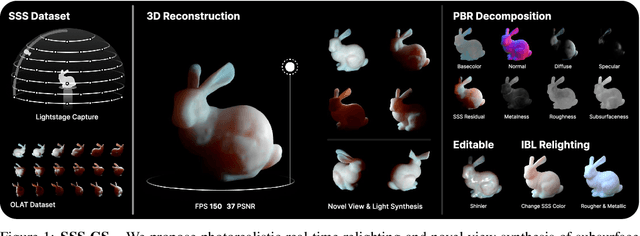
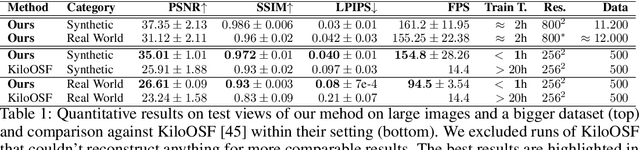
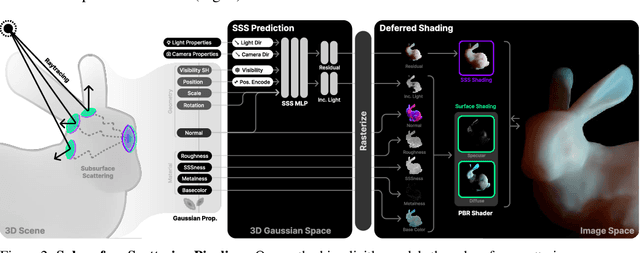
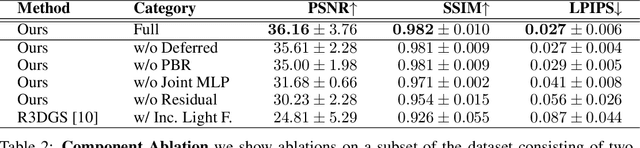
3D reconstruction and relighting of objects made from scattering materials present a significant challenge due to the complex light transport beneath the surface. 3D Gaussian Splatting introduced high-quality novel view synthesis at real-time speeds. While 3D Gaussians efficiently approximate an object's surface, they fail to capture the volumetric properties of subsurface scattering. We propose a framework for optimizing an object's shape together with the radiance transfer field given multi-view OLAT (one light at a time) data. Our method decomposes the scene into an explicit surface represented as 3D Gaussians, with a spatially varying BRDF, and an implicit volumetric representation of the scattering component. A learned incident light field accounts for shadowing. We optimize all parameters jointly via ray-traced differentiable rendering. Our approach enables material editing, relighting and novel view synthesis at interactive rates. We show successful application on synthetic data and introduce a newly acquired multi-view multi-light dataset of objects in a light-stage setup. Compared to previous work we achieve comparable or better results at a fraction of optimization and rendering time while enabling detailed control over material attributes. Project page https://sss.jdihlmann.com/
3D Congealing: 3D-Aware Image Alignment in the Wild
Apr 02, 2024



We propose 3D Congealing, a novel problem of 3D-aware alignment for 2D images capturing semantically similar objects. Given a collection of unlabeled Internet images, our goal is to associate the shared semantic parts from the inputs and aggregate the knowledge from 2D images to a shared 3D canonical space. We introduce a general framework that tackles the task without assuming shape templates, poses, or any camera parameters. At its core is a canonical 3D representation that encapsulates geometric and semantic information. The framework optimizes for the canonical representation together with the pose for each input image, and a per-image coordinate map that warps 2D pixel coordinates to the 3D canonical frame to account for the shape matching. The optimization procedure fuses prior knowledge from a pre-trained image generative model and semantic information from input images. The former provides strong knowledge guidance for this under-constraint task, while the latter provides the necessary information to mitigate the training data bias from the pre-trained model. Our framework can be used for various tasks such as correspondence matching, pose estimation, and image editing, achieving strong results on real-world image datasets under challenging illumination conditions and on in-the-wild online image collections.
SHINOBI: Shape and Illumination using Neural Object Decomposition via BRDF Optimization In-the-wild
Jan 18, 2024We present SHINOBI, an end-to-end framework for the reconstruction of shape, material, and illumination from object images captured with varying lighting, pose, and background. Inverse rendering of an object based on unconstrained image collections is a long-standing challenge in computer vision and graphics and requires a joint optimization over shape, radiance, and pose. We show that an implicit shape representation based on a multi-resolution hash encoding enables faster and robust shape reconstruction with joint camera alignment optimization that outperforms prior work. Further, to enable the editing of illumination and object reflectance (i.e. material) we jointly optimize BRDF and illumination together with the object's shape. Our method is class-agnostic and works on in-the-wild image collections of objects to produce relightable 3D assets for several use cases such as AR/VR, movies, games, etc. Project page: https://shinobi.aengelhardt.com Video: https://www.youtube.com/watch?v=iFENQ6AcYd8&feature=youtu.be
SIGNeRF: Scene Integrated Generation for Neural Radiance Fields
Jan 03, 2024



Advances in image diffusion models have recently led to notable improvements in the generation of high-quality images. In combination with Neural Radiance Fields (NeRFs), they enabled new opportunities in 3D generation. However, most generative 3D approaches are object-centric and applying them to editing existing photorealistic scenes is not trivial. We propose SIGNeRF, a novel approach for fast and controllable NeRF scene editing and scene-integrated object generation. A new generative update strategy ensures 3D consistency across the edited images, without requiring iterative optimization. We find that depth-conditioned diffusion models inherently possess the capability to generate 3D consistent views by requesting a grid of images instead of single views. Based on these insights, we introduce a multi-view reference sheet of modified images. Our method updates an image collection consistently based on the reference sheet and refines the original NeRF with the newly generated image set in one go. By exploiting the depth conditioning mechanism of the image diffusion model, we gain fine control over the spatial location of the edit and enforce shape guidance by a selected region or an external mesh.
NAVI: Category-Agnostic Image Collections with High-Quality 3D Shape and Pose Annotations
Jun 15, 2023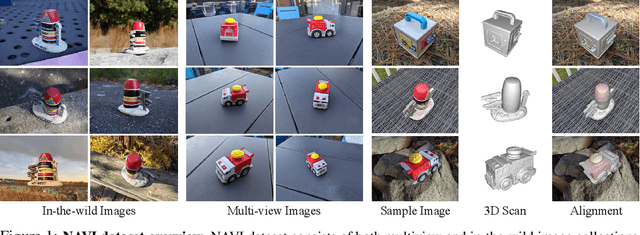
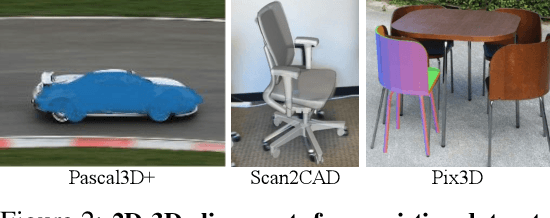

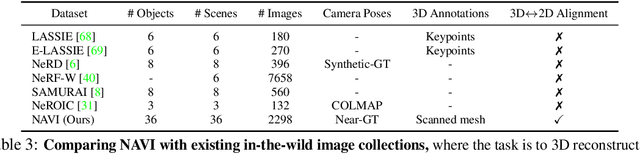
Recent advances in neural reconstruction enable high-quality 3D object reconstruction from casually captured image collections. Current techniques mostly analyze their progress on relatively simple image collections where Structure-from-Motion (SfM) techniques can provide ground-truth (GT) camera poses. We note that SfM techniques tend to fail on in-the-wild image collections such as image search results with varying backgrounds and illuminations. To enable systematic research progress on 3D reconstruction from casual image captures, we propose NAVI: a new dataset of category-agnostic image collections of objects with high-quality 3D scans along with per-image 2D-3D alignments providing near-perfect GT camera parameters. These 2D-3D alignments allow us to extract accurate derivative annotations such as dense pixel correspondences, depth and segmentation maps. We demonstrate the use of NAVI image collections on different problem settings and show that NAVI enables more thorough evaluations that were not possible with existing datasets. We believe NAVI is beneficial for systematic research progress on 3D reconstruction and correspondence estimation. Project page: https://navidataset.github.io
SAMURAI: Shape And Material from Unconstrained Real-world Arbitrary Image collections
May 31, 2022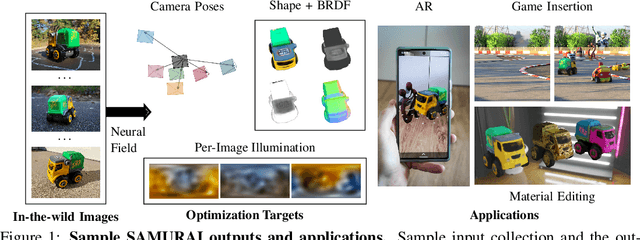

Inverse rendering of an object under entirely unknown capture conditions is a fundamental challenge in computer vision and graphics. Neural approaches such as NeRF have achieved photorealistic results on novel view synthesis, but they require known camera poses. Solving this problem with unknown camera poses is highly challenging as it requires joint optimization over shape, radiance, and pose. This problem is exacerbated when the input images are captured in the wild with varying backgrounds and illuminations. Standard pose estimation techniques fail in such image collections in the wild due to very few estimated correspondences across images. Furthermore, NeRF cannot relight a scene under any illumination, as it operates on radiance (the product of reflectance and illumination). We propose a joint optimization framework to estimate the shape, BRDF, and per-image camera pose and illumination. Our method works on in-the-wild online image collections of an object and produces relightable 3D assets for several use-cases such as AR/VR. To our knowledge, our method is the first to tackle this severely unconstrained task with minimal user interaction. Project page: https://markboss.me/publication/2022-samurai/ Video: https://youtu.be/LlYuGDjXp-8