 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirePlace: Geometric Refinements of LLM Common Sense Reasoning for 3D Object Placement
Mar 06, 2025Scene generation with 3D assets presents a complex challenge, requiring both high-level semantic understanding and low-level geometric reasoning. While Multimodal Large Language Models (MLLMs) excel at semantic tasks, their application to 3D scene generation is hindered by their limited grounding on 3D geometry. In this paper, we investigate how to best work with MLLMs in an object placement task. Towards this goal, we introduce a novel framework, FirePlace, that applies existing MLLMs in (1) 3D geometric reasoning and the extraction of relevant geometric details from the 3D scene, (2) constructing and solving geometric constraints on the extracted low-level geometry, and (3) pruning for final placements that conform to common sense. By combining geometric reasoning with real-world understanding of MLLMs, our method can propose object placements that satisfy both geometric constraints as well as high-level semantic common-sense considerations. Our experiments show that these capabilities allow our method to place objects more effectively in complex scenes with intricate geometry, surpassing the quality of prior work.
NAVI: Category-Agnostic Image Collections with High-Quality 3D Shape and Pose Annotations
Jun 15, 2023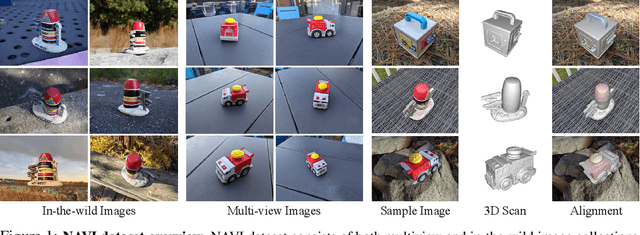
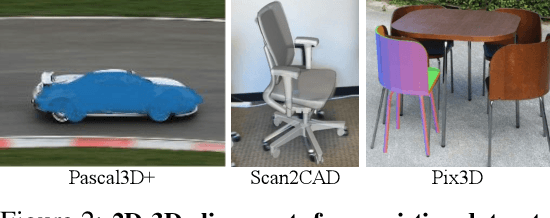

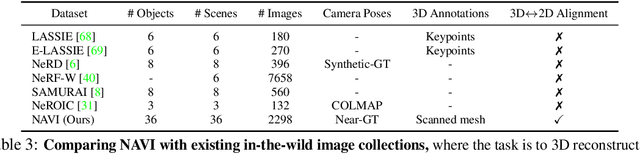
Recent advances in neural reconstruction enable high-quality 3D object reconstruction from casually captured image collections. Current techniques mostly analyze their progress on relatively simple image collections where Structure-from-Motion (SfM) techniques can provide ground-truth (GT) camera poses. We note that SfM techniques tend to fail on in-the-wild image collections such as image search results with varying backgrounds and illuminations. To enable systematic research progress on 3D reconstruction from casual image captures, we propose NAVI: a new dataset of category-agnostic image collections of objects with high-quality 3D scans along with per-image 2D-3D alignments providing near-perfect GT camera parameters. These 2D-3D alignments allow us to extract accurate derivative annotations such as dense pixel correspondences, depth and segmentation maps. We demonstrate the use of NAVI image collections on different problem settings and show that NAVI enables more thorough evaluations that were not possible with existing datasets. We believe NAVI is beneficial for systematic research progress on 3D reconstruction and correspondence estimation. Project page: https://navidataset.github.io