 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNAVI: Category-Agnostic Image Collections with High-Quality 3D Shape and Pose Annotations
Jun 15, 2023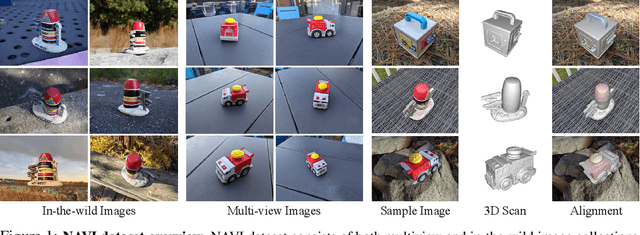
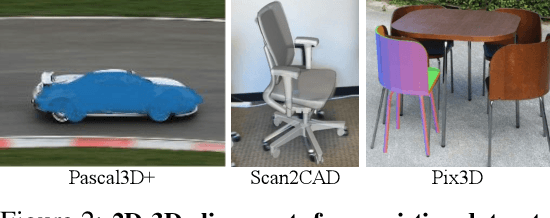

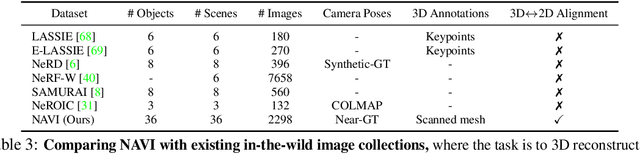
Recent advances in neural reconstruction enable high-quality 3D object reconstruction from casually captured image collections. Current techniques mostly analyze their progress on relatively simple image collections where Structure-from-Motion (SfM) techniques can provide ground-truth (GT) camera poses. We note that SfM techniques tend to fail on in-the-wild image collections such as image search results with varying backgrounds and illuminations. To enable systematic research progress on 3D reconstruction from casual image captures, we propose NAVI: a new dataset of category-agnostic image collections of objects with high-quality 3D scans along with per-image 2D-3D alignments providing near-perfect GT camera parameters. These 2D-3D alignments allow us to extract accurate derivative annotations such as dense pixel correspondences, depth and segmentation maps. We demonstrate the use of NAVI image collections on different problem settings and show that NAVI enables more thorough evaluations that were not possible with existing datasets. We believe NAVI is beneficial for systematic research progress on 3D reconstruction and correspondence estimation. Project page: https://navidataset.github.io
Balancing Constraints and Submodularity in Data Subset Selection
Apr 26, 2021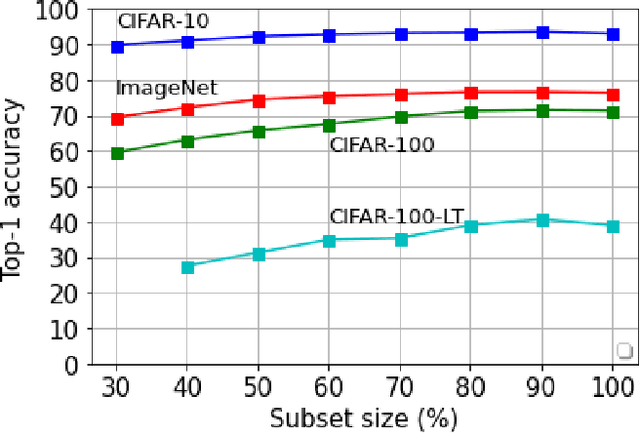
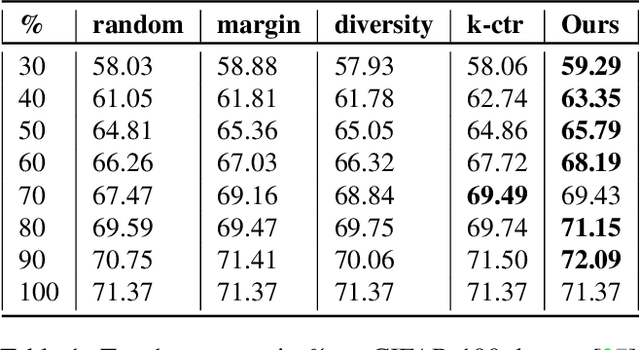
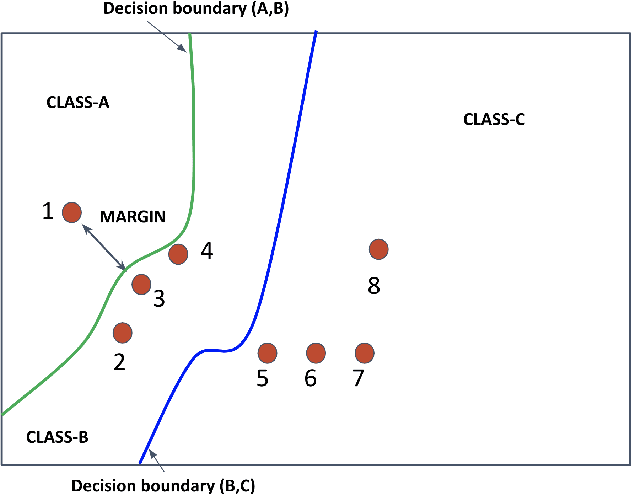
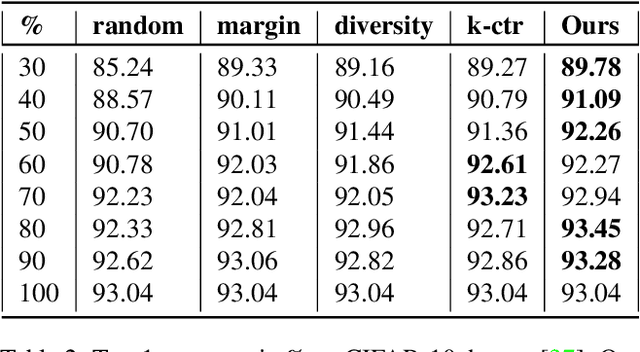
Deep learning has yielded extraordinary results in vision and natural language processing, but this achievement comes at a cost. Most deep learning models require enormous resources during training, both in terms of computation and in human labeling effort. In this paper, we show that one can achieve similar accuracy to traditional deep-learning models, while using less training data. Much of the previous work in this area relies on using uncertainty or some form of diversity to select subsets of a larger training set. Submodularity, a discrete analogue of convexity, has been exploited to model diversity in various settings including data subset selection. In contrast to prior methods, we propose a novel diversity driven objective function, and balancing constraints on class labels and decision boundaries using matroids. This allows us to use efficient greedy algorithms with approximation guarantees for subset selection. We outperform baselines on standard image classification datasets such as CIFAR-10, CIFAR-100, and ImageNet. In addition, we also show that the proposed balancing constraints can play a key role in boosting the performance in long-tailed datasets such as CIFAR-100-LT.