 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAMMR: HierArchical MultiModal React agents for generic VQA
Apr 08, 2024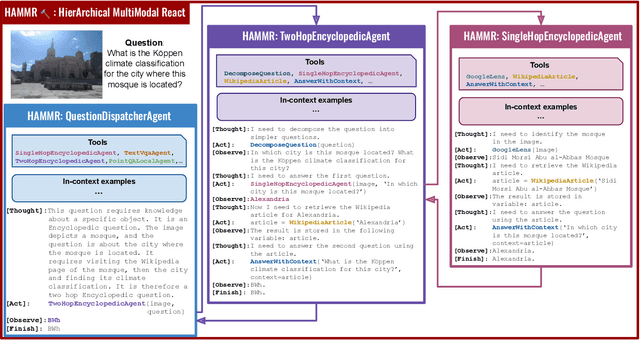
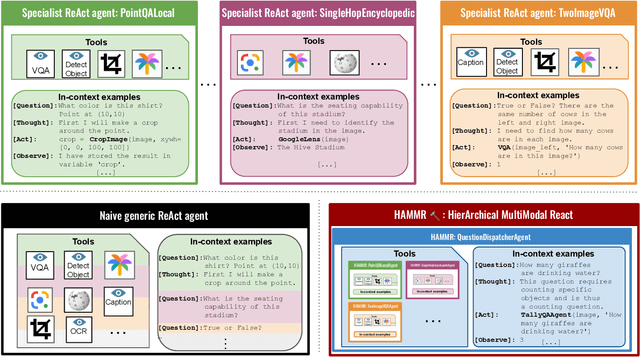
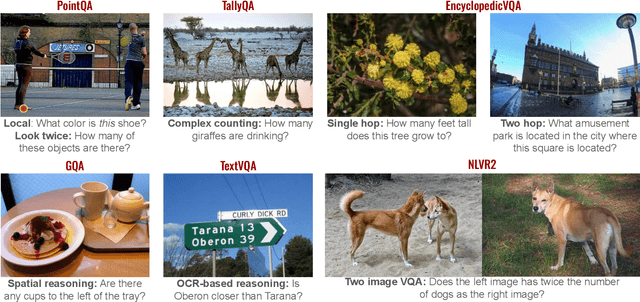
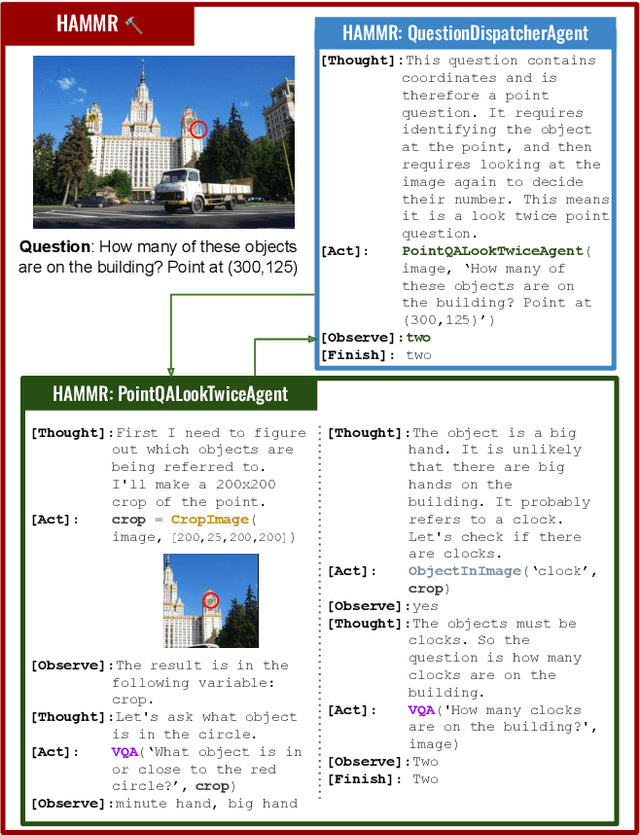
Combining Large Language Models (LLMs) with external specialized tools (LLMs+tools) is a recent paradigm to solve multimodal tasks such as Visual Question Answering (VQA). While this approach was demonstrated to work well when optimized and evaluated for each individual benchmark, in practice it is crucial for the next generation of real-world AI systems to handle a broad range of multimodal problems. Therefore we pose the VQA problem from a unified perspective and evaluate a single system on a varied suite of VQA tasks including counting, spatial reasoning, OCR-based reasoning, visual pointing, external knowledge, and more. In this setting, we demonstrate that naively applying the LLM+tools approach using the combined set of all tools leads to poor results. This motivates us to introduce HAMMR: HierArchical MultiModal React. We start from a multimodal ReAct-based system and make it hierarchical by enabling our HAMMR agents to call upon other specialized agents. This enhances the compositionality of the LLM+tools approach, which we show to be critical for obtaining high accuracy on generic VQA. Concretely, on our generic VQA suite, HAMMR outperforms the naive LLM+tools approach by 19.5%. Additionally, HAMMR achieves state-of-the-art results on this task, outperforming the generic standalone PaLI-X VQA model by 5.0%.
How (not) to ensemble LVLMs for VQA
Oct 10, 2023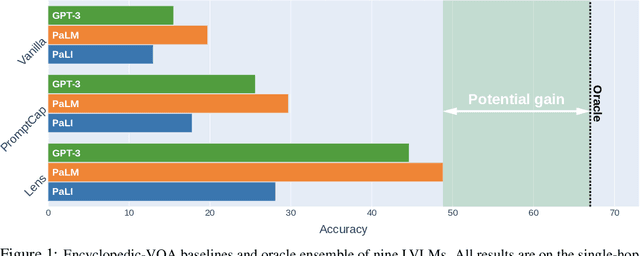
This paper studies ensembling in the era of Large Vision-Language Models (LVLMs). Ensembling is a classical method to combine different models to get increased performance. In the recent work on Encyclopedic-VQA the authors examine a wide variety of models to solve their task: from vanilla LVLMs, to models including the caption as extra context, to models augmented with Lens-based retrieval of Wikipedia pages. Intuitively these models are highly complementary, which should make them ideal for ensembling. Indeed, an oracle experiment shows potential gains from 48.8% accuracy (the best single model) all the way up to 67% (best possible ensemble). So it is a trivial exercise to create an ensemble with substantial real gains. Or is it?
Encyclopedic VQA: Visual questions about detailed properties of fine-grained categories
Jun 15, 2023We propose Encyclopedic-VQA, a large scale visual question answering (VQA) dataset featuring visual questions about detailed properties of fine-grained categories and instances. It contains 221k unique question+answer pairs each matched with (up to) 5 images, resulting in a total of 1M VQA samples. Moreover, our dataset comes with a controlled knowledge base derived from Wikipedia, marking the evidence to support each answer. Empirically, we show that our dataset poses a hard challenge for large vision+language models as they perform poorly on our dataset: PaLI [14] is state-of-the-art on OK-VQA [37], yet it only achieves 13.0% accuracy on our dataset. Moreover, we experimentally show that progress on answering our encyclopedic questions can be achieved by augmenting large models with a mechanism that retrieves relevant information from the knowledge base. An oracle experiment with perfect retrieval achieves 87.0% accuracy on the single-hop portion of our dataset, and an automatic retrieval-augmented prototype yields 48.8%. We believe that our dataset enables future research on retrieval-augmented vision+language models.
Cascaded Video Generation for Videos In-the-Wild
Jun 01, 2022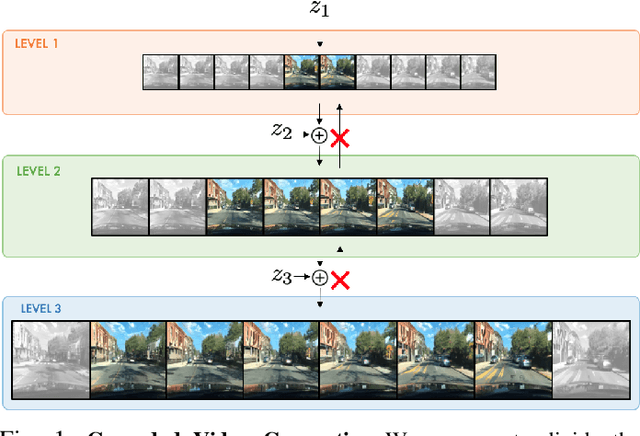
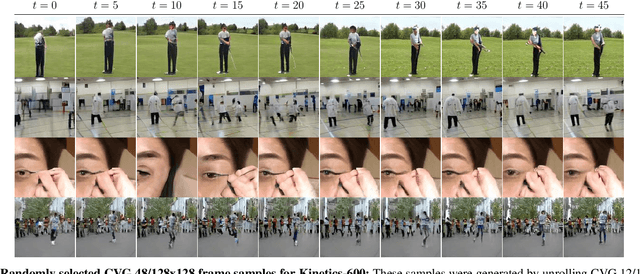
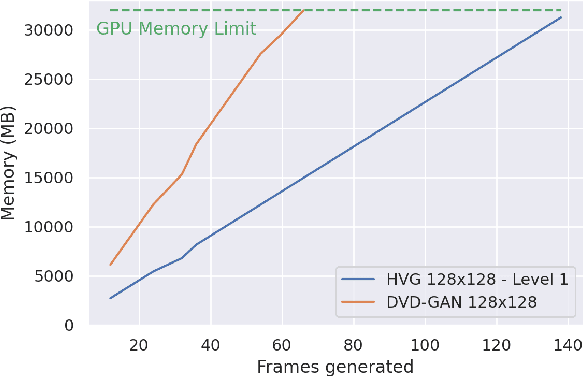
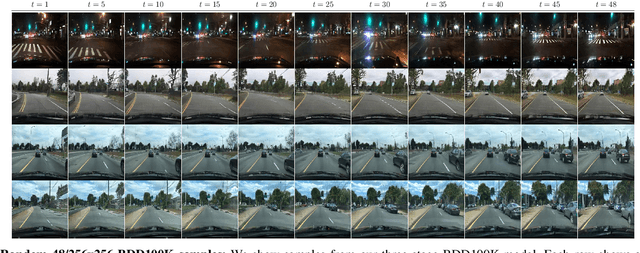
Videos can be created by first outlining a global view of the scene and then adding local details. Inspired by this idea we propose a cascaded model for video generation which follows a coarse to fine approach. First our model generates a low resolution video, establishing the global scene structure, which is then refined by subsequent cascade levels operating at larger resolutions. We train each cascade level sequentially on partial views of the videos, which reduces the computational complexity of our model and makes it scalable to high-resolution videos with many frames. We empirically validate our approach on UCF101 and Kinetics-600, for which our model is competitive with the state-of-the-art. We further demonstrate the scaling capabilities of our model and train a three-level model on the BDD100K dataset which generates 256x256 pixels videos with 48 frames.
Hierarchical Video Generation for Complex Data
Jun 04, 2021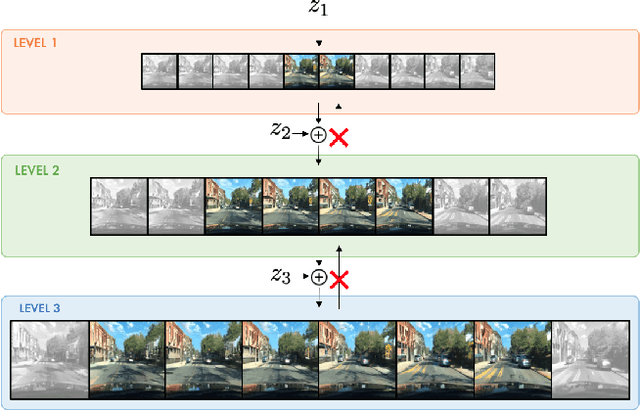
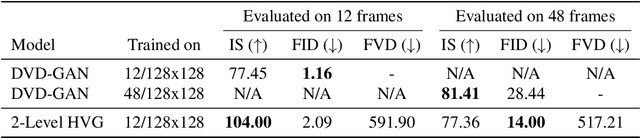
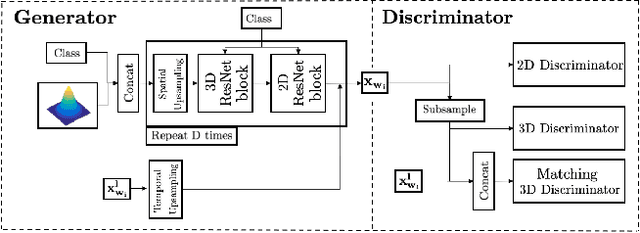
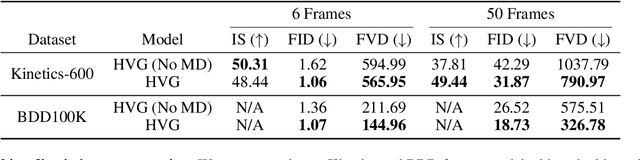
Videos can often be created by first outlining a global description of the scene and then adding local details. Inspired by this we propose a hierarchical model for video generation which follows a coarse to fine approach. First our model generates a low resolution video, establishing the global scene structure, that is then refined by subsequent levels in the hierarchy. We train each level in our hierarchy sequentially on partial views of the videos. This reduces the computational complexity of our generative model, which scales to high-resolution videos beyond a few frames. We validate our approach on Kinetics-600 and BDD100K, for which we train a three level model capable of generating 256x256 videos with 48 frames.
Recovering Petaflops in Contrastive Semi-Supervised Learning of Visual Representations
Jun 18, 2020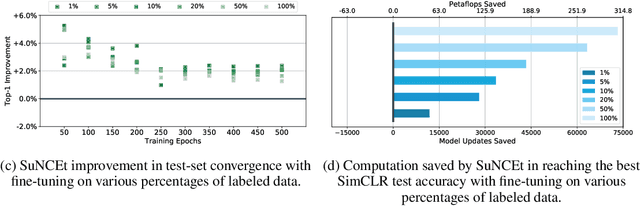
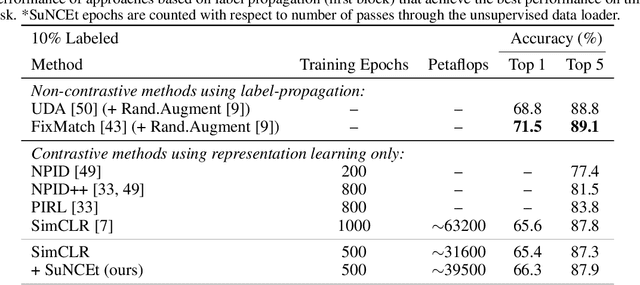
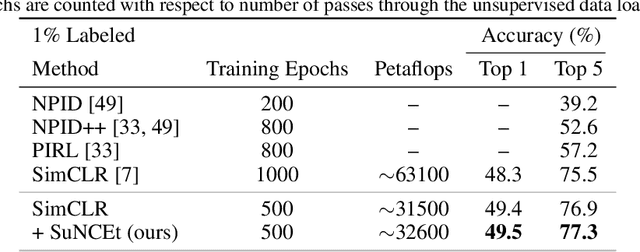

We investigate a strategy for improving the computational efficiency of contrastive learning of visual representations by leveraging a small amount of supervised information during pre-training. We propose a semi-supervised loss, SuNCEt, based on noise-contrastive estimation, that aims to distinguish examples of different classes in addition to the self-supervised instance-wise pretext tasks. We find that SuNCEt can be used to match the semi-supervised learning accuracy of previous contrastive approaches with significantly less computational effort. Our main insight is that leveraging even a small amount of labeled data during pre-training, and not only during fine-tuning, provides an important signal that can significantly accelerate contrastive learning of visual representations.
Improved Conditional VRNNs for Video Prediction
Apr 27, 2019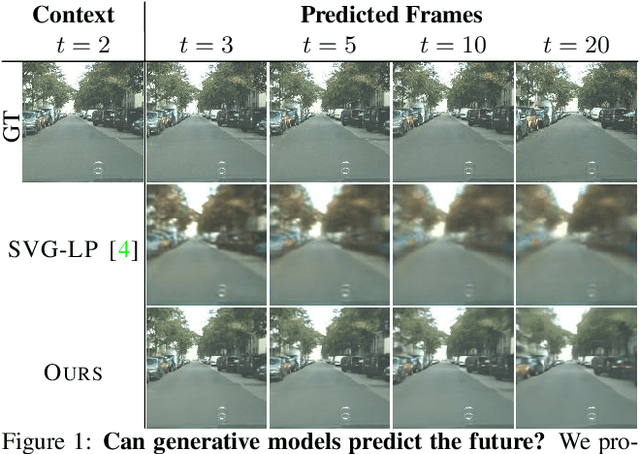
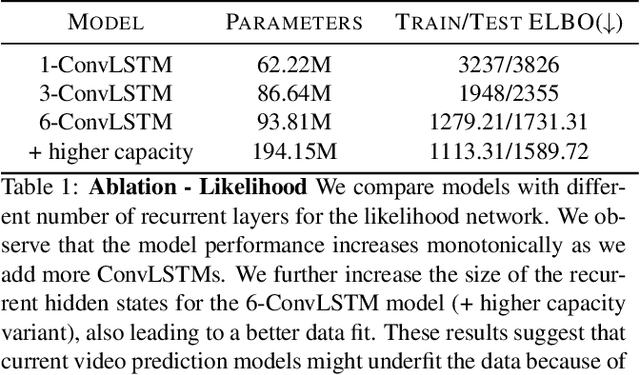
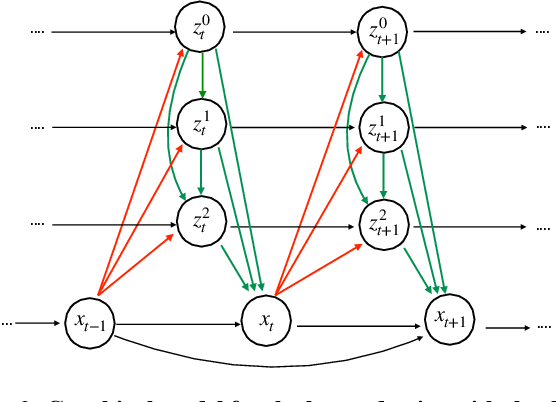
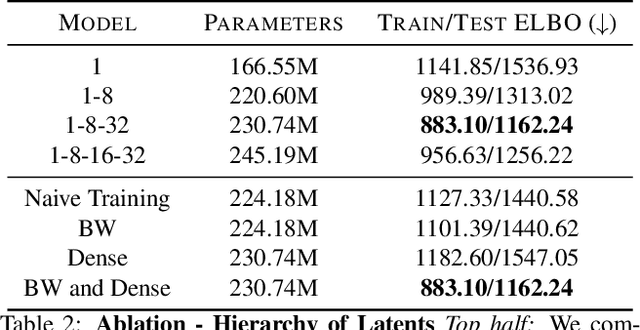
Predicting future frames for a video sequence is a challenging generative modeling task. Promising approaches include probabilistic latent variable models such as the Variational Auto-Encoder. While VAEs can handle uncertainty and model multiple possible future outcomes, they have a tendency to produce blurry predictions. In this work we argue that this is a sign of underfitting. To address this issue, we propose to increase the expressiveness of the latent distributions and to use higher capacity likelihood models. Our approach relies on a hierarchy of latent variables, which defines a family of flexible prior and posterior distributions in order to better model the probability of future sequences. We validate our proposal through a series of ablation experiments and compare our approach to current state-of-the-art latent variable models. Our method performs favorably under several metrics in three different datasets.
MovieGraphs: Towards Understanding Human-Centric Situations from Videos
Apr 15, 2018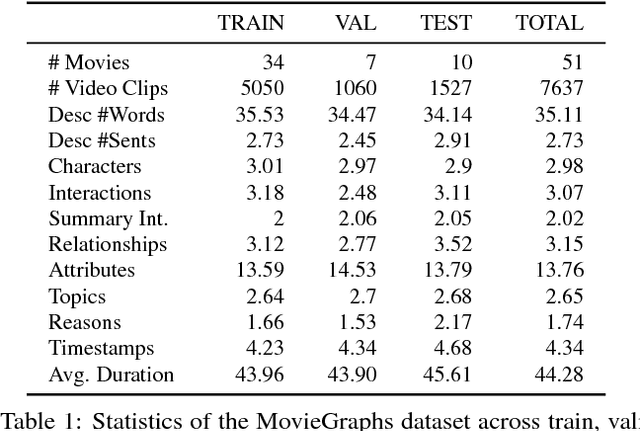
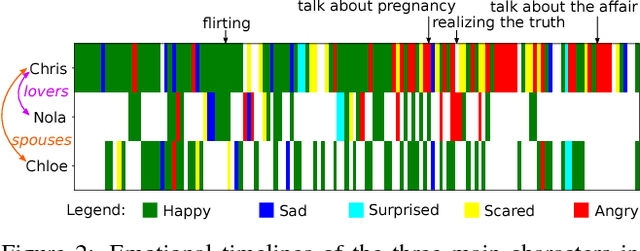
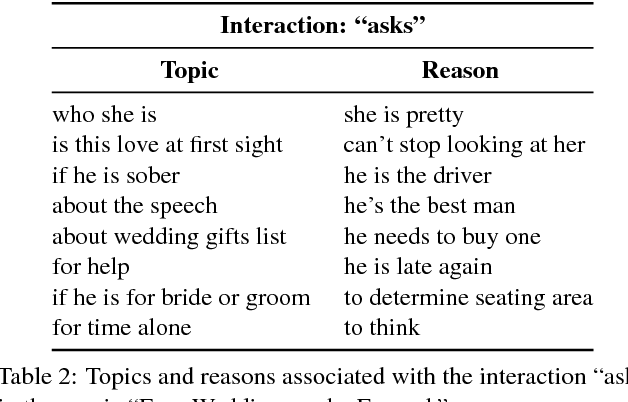
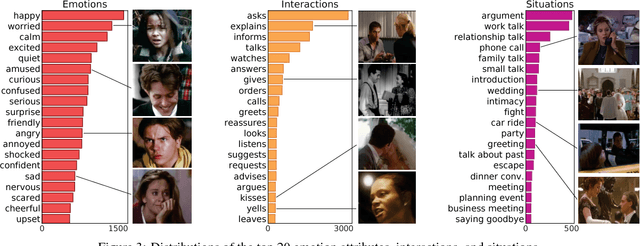
There is growing interest in artificial intelligence to build socially intelligent robots. This requires machines to have the ability to "read" people's emotions, motivations, and other factors that affect behavior. Towards this goal, we introduce a novel dataset called MovieGraphs which provides detailed, graph-based annotations of social situations depicted in movie clips. Each graph consists of several types of nodes, to capture who is present in the clip, their emotional and physical attributes, their relationships (i.e., parent/child), and the interactions between them. Most interactions are associated with topics that provide additional details, and reasons that give motivations for actions. In addition, most interactions and many attributes are grounded in the video with time stamps. We provide a thorough analysis of our dataset, showing interesting common-sense correlations between different social aspects of scenes, as well as across scenes over time. We propose a method for querying videos and text with graphs, and show that: 1) our graphs contain rich and sufficient information to summarize and localize each scene; and 2) subgraphs allow us to describe situations at an abstract level and retrieve multiple semantically relevant situations. We also propose methods for interaction understanding via ordering, and reason understanding. MovieGraphs is the first benchmark to focus on inferred properties of human-centric situations, and opens up an exciting avenue towards socially-intelligent AI agents.
Annotating Object Instances with a Polygon-RNN
Apr 18, 2017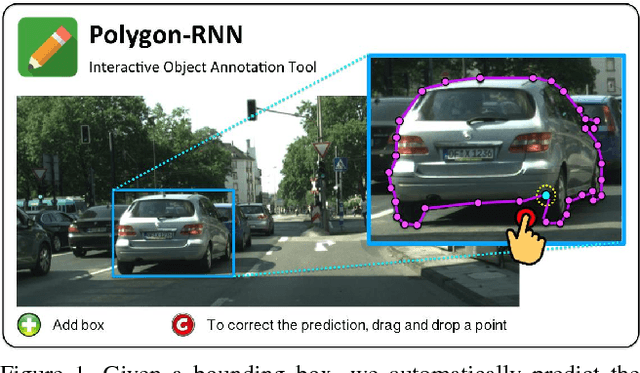
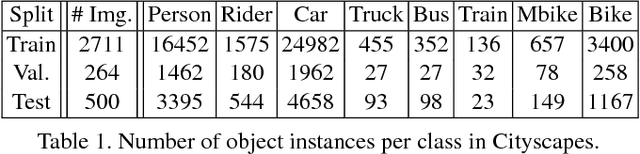
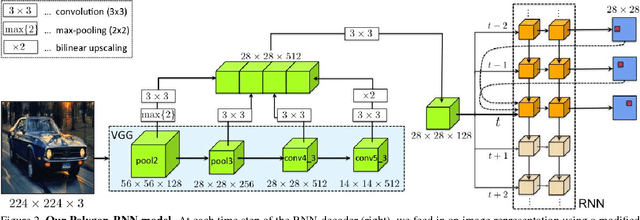
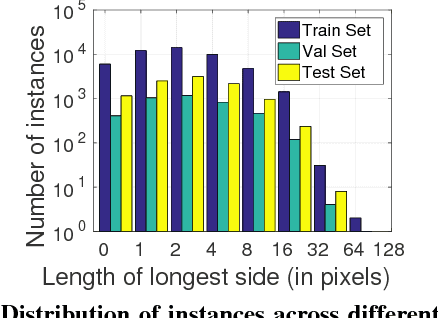
We propose an approach for semi-automatic annotation of object instances. While most current methods treat object segmentation as a pixel-labeling problem, we here cast it as a polygon prediction task, mimicking how most current datasets have been annotated. In particular, our approach takes as input an image crop and sequentially produces vertices of the polygon outlining the object. This allows a human annotator to interfere at any time and correct a vertex if needed, producing as accurate segmentation as desired by the annotator. We show that our approach speeds up the annotation process by a factor of 4.7 across all classes in Cityscapes, while achieving 78.4% agreement in IoU with original ground-truth, matching the typical agreement between human annotators. For cars, our speed-up factor is 7.3 for an agreement of 82.2%. We further show generalization capabilities of our approach to unseen datasets.
Cross-Modal Scene Networks
Oct 27, 2016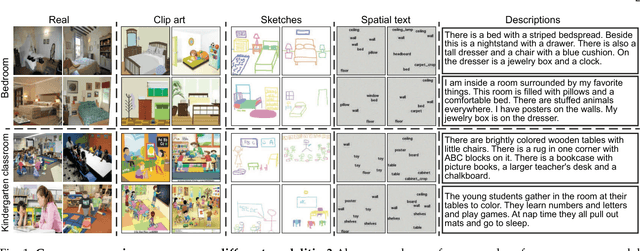

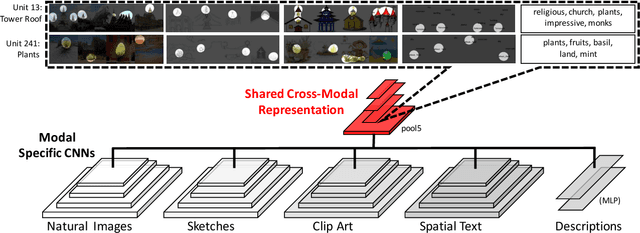
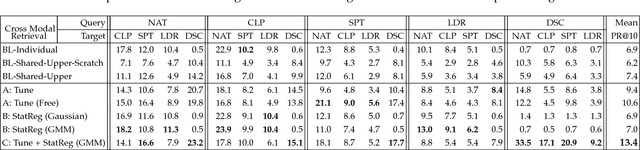
People can recognize scenes across many different modalities beyond natural images. In this paper, we investigate how to learn cross-modal scene representations that transfer across modalities. To study this problem, we introduce a new cross-modal scene dataset. While convolutional neural networks can categorize scenes well, they also learn an intermediate representation not aligned across modalities, which is undesirable for cross-modal transfer applications. We present methods to regularize cross-modal convolutional neural networks so that they have a shared representation that is agnostic of the modality. Our experiments suggest that our scene representation can help transfer representations across modalities for retrieval. Moreover, our visualizations suggest that units emerge in the shared representation that tend to activate on consistent concepts independently of the modality.