 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaskInversion: Localized Embeddings via Optimization of Explainability Maps
Jul 29, 2024Vision-language foundation models such as CLIP have achieved tremendous results in global vision-language alignment, but still show some limitations in creating representations for specific image regions. % To address this problem, we propose MaskInversion, a method that leverages the feature representations of pre-trained foundation models, such as CLIP, to generate a context-aware embedding for a query image region specified by a mask at test time. MaskInversion starts with initializing an embedding token and compares its explainability map, derived from the foundation model, to the query mask. The embedding token is then subsequently refined to approximate the query region by minimizing the discrepancy between its explainability map and the query mask. During this process, only the embedding vector is updated, while the underlying foundation model is kept frozen allowing to use MaskInversion with any pre-trained model. As deriving the explainability map involves computing its gradient, which can be expensive, we propose a gradient decomposition strategy that simplifies this computation. The learned region representation can be used for a broad range of tasks, including open-vocabulary class retrieval, referring expression comprehension, as well as for localized captioning and image generation. We evaluate the proposed method on all those tasks on several datasets such as PascalVOC, MSCOCO, RefCOCO, and OpenImagesV7 and show its capabilities compared to other SOTA approaches.
HAMMR: HierArchical MultiModal React agents for generic VQA
Apr 08, 2024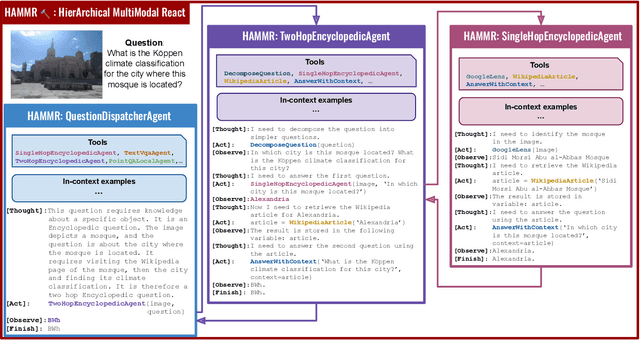
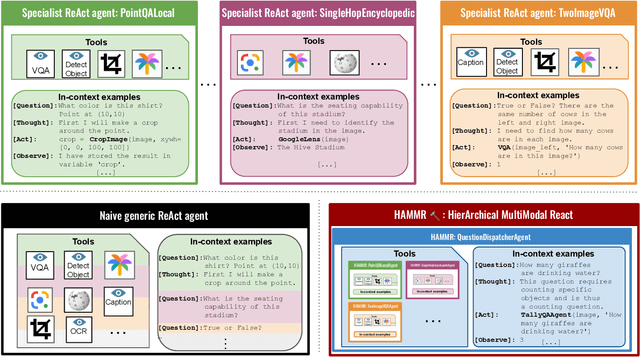
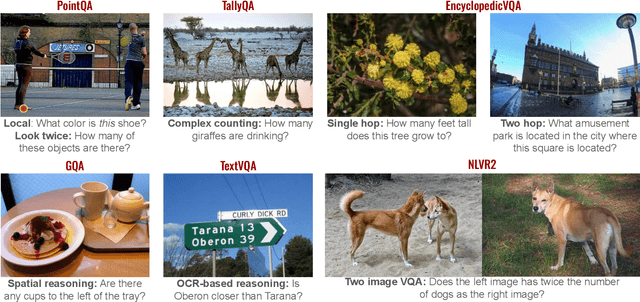
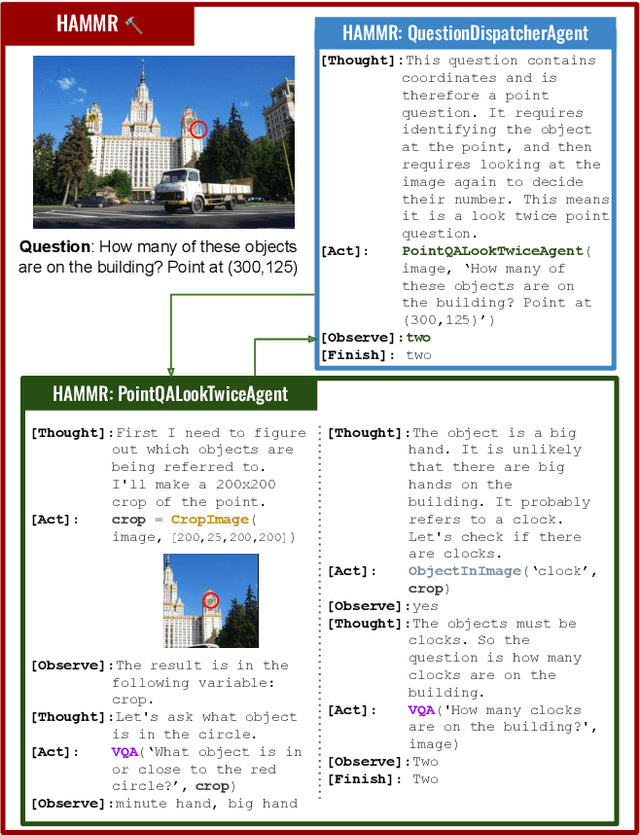
Combining Large Language Models (LLMs) with external specialized tools (LLMs+tools) is a recent paradigm to solve multimodal tasks such as Visual Question Answering (VQA). While this approach was demonstrated to work well when optimized and evaluated for each individual benchmark, in practice it is crucial for the next generation of real-world AI systems to handle a broad range of multimodal problems. Therefore we pose the VQA problem from a unified perspective and evaluate a single system on a varied suite of VQA tasks including counting, spatial reasoning, OCR-based reasoning, visual pointing, external knowledge, and more. In this setting, we demonstrate that naively applying the LLM+tools approach using the combined set of all tools leads to poor results. This motivates us to introduce HAMMR: HierArchical MultiModal React. We start from a multimodal ReAct-based system and make it hierarchical by enabling our HAMMR agents to call upon other specialized agents. This enhances the compositionality of the LLM+tools approach, which we show to be critical for obtaining high accuracy on generic VQA. Concretely, on our generic VQA suite, HAMMR outperforms the naive LLM+tools approach by 19.5%. Additionally, HAMMR achieves state-of-the-art results on this task, outperforming the generic standalone PaLI-X VQA model by 5.0%.
Grounding Everything: Emerging Localization Properties in Vision-Language Transformers
Dec 05, 2023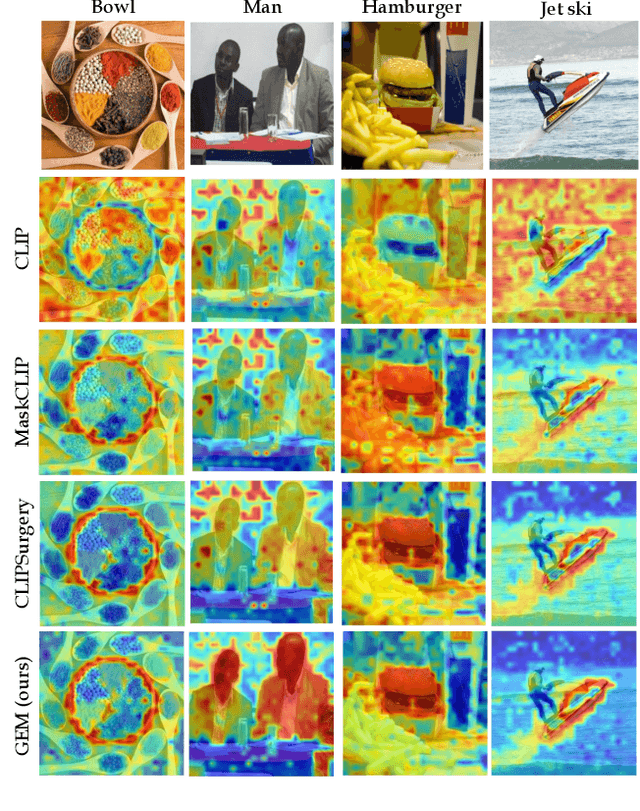
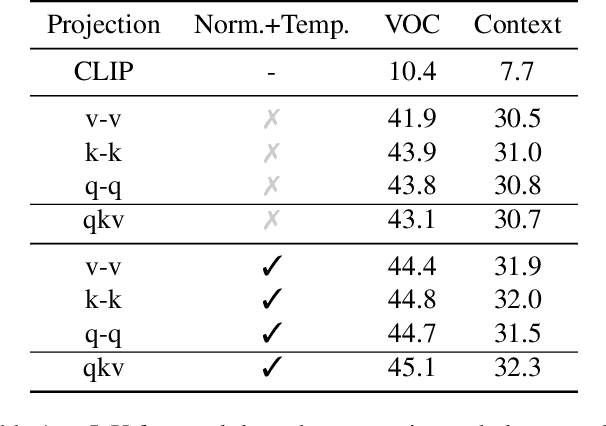
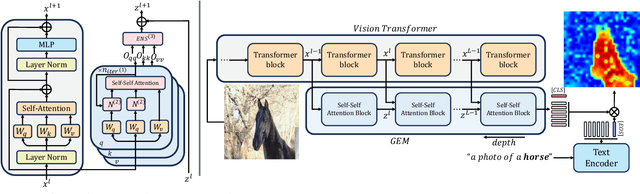
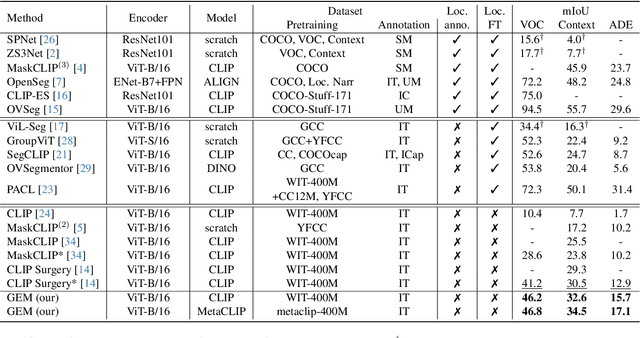
Vision-language foundation models have shown remarkable performance in various zero-shot settings such as image retrieval, classification, or captioning. But so far, those models seem to fall behind when it comes to zero-shot localization of referential expressions and objects in images. As a result, they need to be fine-tuned for this task. In this paper, we show that pretrained vision-language (VL) models allow for zero-shot open-vocabulary object localization without any fine-tuning. To leverage those capabilities, we propose a Grounding Everything Module (GEM) that generalizes the idea of value-value attention introduced by CLIPSurgery to a self-self attention path. We show that the concept of self-self attention corresponds to clustering, thus enforcing groups of tokens arising from the same object to be similar while preserving the alignment with the language space. To further guide the group formation, we propose a set of regularizations that allows the model to finally generalize across datasets and backbones. We evaluate the proposed GEM framework on various benchmark tasks and datasets for semantic segmentation. It shows that GEM not only outperforms other training-free open-vocabulary localization methods, but also achieves state-of-the-art results on the recently proposed OpenImagesV7 large-scale segmentation benchmark.
StoryBench: A Multifaceted Benchmark for Continuous Story Visualization
Aug 22, 2023



Generating video stories from text prompts is a complex task. In addition to having high visual quality, videos need to realistically adhere to a sequence of text prompts whilst being consistent throughout the frames. Creating a benchmark for video generation requires data annotated over time, which contrasts with the single caption used often in video datasets. To fill this gap, we collect comprehensive human annotations on three existing datasets, and introduce StoryBench: a new, challenging multi-task benchmark to reliably evaluate forthcoming text-to-video models. Our benchmark includes three video generation tasks of increasing difficulty: action execution, where the next action must be generated starting from a conditioning video; story continuation, where a sequence of actions must be executed starting from a conditioning video; and story generation, where a video must be generated from only text prompts. We evaluate small yet strong text-to-video baselines, and show the benefits of training on story-like data algorithmically generated from existing video captions. Finally, we establish guidelines for human evaluation of video stories, and reaffirm the need of better automatic metrics for video generation. StoryBench aims at encouraging future research efforts in this exciting new area.
NAVI: Category-Agnostic Image Collections with High-Quality 3D Shape and Pose Annotations
Jun 15, 2023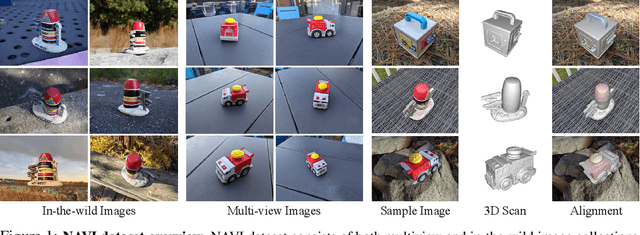

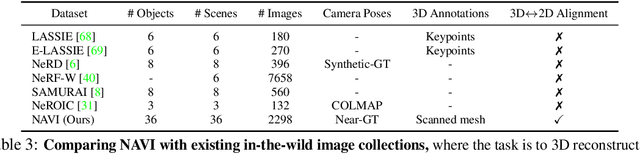
Recent advances in neural reconstruction enable high-quality 3D object reconstruction from casually captured image collections. Current techniques mostly analyze their progress on relatively simple image collections where Structure-from-Motion (SfM) techniques can provide ground-truth (GT) camera poses. We note that SfM techniques tend to fail on in-the-wild image collections such as image search results with varying backgrounds and illuminations. To enable systematic research progress on 3D reconstruction from casual image captures, we propose NAVI: a new dataset of category-agnostic image collections of objects with high-quality 3D scans along with per-image 2D-3D alignments providing near-perfect GT camera parameters. These 2D-3D alignments allow us to extract accurate derivative annotations such as dense pixel correspondences, depth and segmentation maps. We demonstrate the use of NAVI image collections on different problem settings and show that NAVI enables more thorough evaluations that were not possible with existing datasets. We believe NAVI is beneficial for systematic research progress on 3D reconstruction and correspondence estimation. Project page: https://navidataset.github.io
Estimating Generic 3D Room Structures from 2D Annotations
Jun 15, 2023



Indoor rooms are among the most common use cases in 3D scene understanding. Current state-of-the-art methods for this task are driven by large annotated datasets. Room layouts are especially important, consisting of structural elements in 3D, such as wall, floor, and ceiling. However, they are difficult to annotate, especially on pure RGB video. We propose a novel method to produce generic 3D room layouts just from 2D segmentation masks, which are easy to annotate for humans. Based on these 2D annotations, we automatically reconstruct 3D plane equations for the structural elements and their spatial extent in the scene, and connect adjacent elements at the appropriate contact edges. We annotate and publicly release 2266 3D room layouts on the RealEstate10k dataset, containing YouTube videos. We demonstrate the high quality of these 3D layouts annotations with extensive experiments.
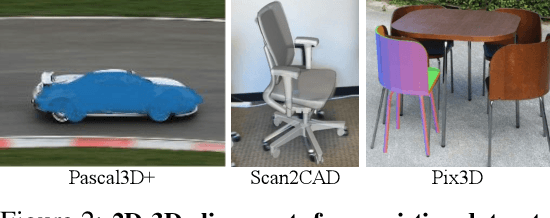
CAD-Estate: Large-scale CAD Model Annotation in RGB Videos
Jun 15, 2023



We propose a method for annotating videos of complex multi-object scenes with a globally-consistent 3D representation of the objects. We annotate each object with a CAD model from a database, and place it in the 3D coordinate frame of the scene with a 9-DoF pose transformation. Our method is semi-automatic and works on commonly-available RGB videos, without requiring a depth sensor. Many steps are performed automatically, and the tasks performed by humans are simple, well-specified, and require only limited reasoning in 3D. This makes them feasible for crowd-sourcing and has allowed us to construct a large-scale dataset by annotating real-estate videos from YouTube. Our dataset CAD-Estate offers 108K instances of 12K unique CAD models placed in the 3D representations of 21K videos. In comparison to Scan2CAD, the largest existing dataset with CAD model annotations on real scenes, CAD-Estate has 8x more instances and 4x more unique CAD models. We showcase the benefits of pre-training a Mask2CAD model on CAD-Estate for the task of automatic 3D object reconstruction and pose estimation, demonstrating that it leads to improvements on the popular Scan2CAD benchmark. We will release the data by mid July 2023.
Encyclopedic VQA: Visual questions about detailed properties of fine-grained categories
Jun 15, 2023We propose Encyclopedic-VQA, a large scale visual question answering (VQA) dataset featuring visual questions about detailed properties of fine-grained categories and instances. It contains 221k unique question+answer pairs each matched with (up to) 5 images, resulting in a total of 1M VQA samples. Moreover, our dataset comes with a controlled knowledge base derived from Wikipedia, marking the evidence to support each answer. Empirically, we show that our dataset poses a hard challenge for large vision+language models as they perform poorly on our dataset: PaLI [14] is state-of-the-art on OK-VQA [37], yet it only achieves 13.0% accuracy on our dataset. Moreover, we experimentally show that progress on answering our encyclopedic questions can be achieved by augmenting large models with a mechanism that retrieves relevant information from the knowledge base. An oracle experiment with perfect retrieval achieves 87.0% accuracy on the single-hop portion of our dataset, and an automatic retrieval-augmented prototype yields 48.8%. We believe that our dataset enables future research on retrieval-augmented vision+language models.
Tracking by 3D Model Estimation of Unknown Objects in Videos
Apr 13, 2023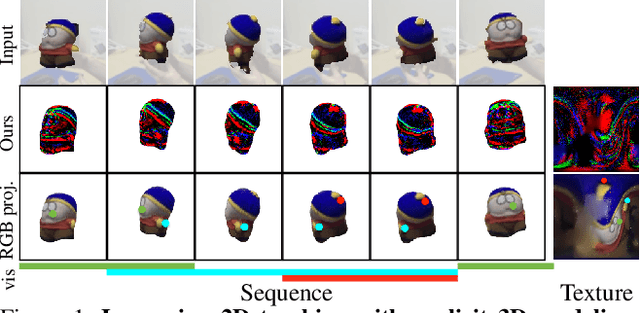
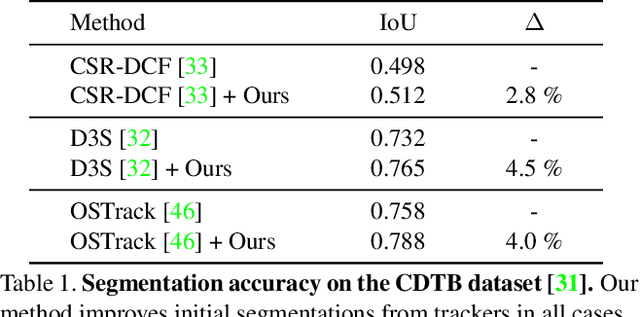
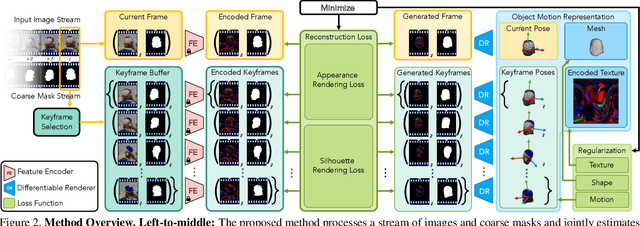
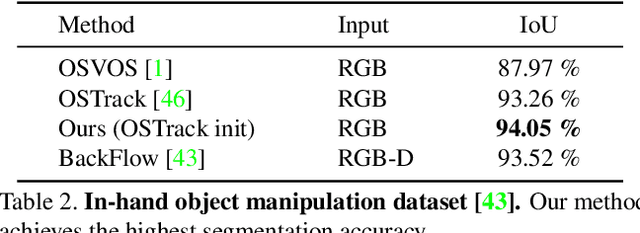
Most model-free visual object tracking methods formulate the tracking task as object location estimation given by a 2D segmentation or a bounding box in each video frame. We argue that this representation is limited and instead propose to guide and improve 2D tracking with an explicit object representation, namely the textured 3D shape and 6DoF pose in each video frame. Our representation tackles a complex long-term dense correspondence problem between all 3D points on the object for all video frames, including frames where some points are invisible. To achieve that, the estimation is driven by re-rendering the input video frames as well as possible through differentiable rendering, which has not been used for tracking before. The proposed optimization minimizes a novel loss function to estimate the best 3D shape, texture, and 6DoF pose. We improve the state-of-the-art in 2D segmentation tracking on three different datasets with mostly rigid objects.
Connecting Vision and Language with Video Localized Narratives
Mar 15, 2023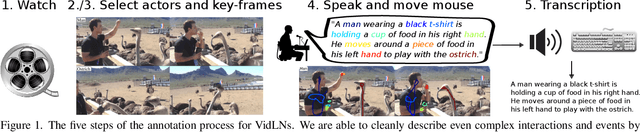
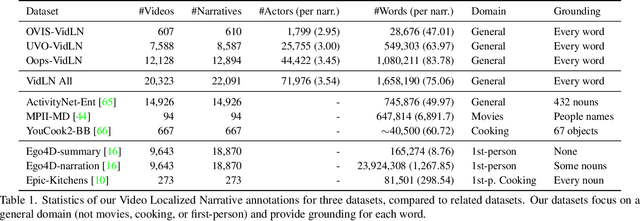
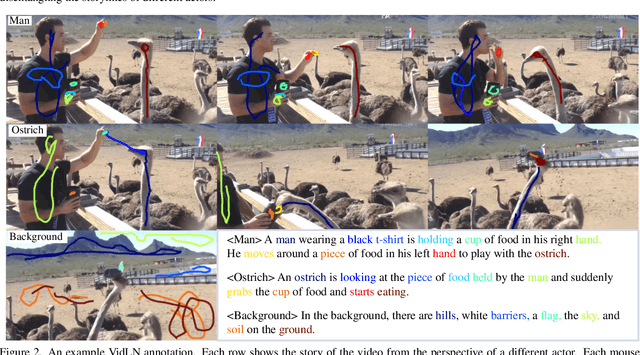
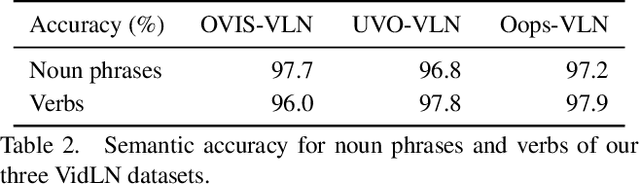
We propose Video Localized Narratives, a new form of multimodal video annotations connecting vision and language. In the original Localized Narratives, annotators speak and move their mouse simultaneously on an image, thus grounding each word with a mouse trace segment. However, this is challenging on a video. Our new protocol empowers annotators to tell the story of a video with Localized Narratives, capturing even complex events involving multiple actors interacting with each other and with several passive objects. We annotated 20k videos of the OVIS, UVO, and Oops datasets, totalling 1.7M words. Based on this data, we also construct new benchmarks for the video narrative grounding and video question answering tasks, and provide reference results from strong baseline models. Our annotations are available at https://google.github.io/video-localized-narratives/.