 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText Prompting for Multi-Concept Video Customization by Autoregressive Generation
May 22, 2024We present a method for multi-concept customization of pretrained text-to-video (T2V) models. Intuitively, the multi-concept customized video can be derived from the (non-linear) intersection of the video manifolds of the individual concepts, which is not straightforward to find. We hypothesize that sequential and controlled walking towards the intersection of the video manifolds, directed by text prompting, leads to the solution. To do so, we generate the various concepts and their corresponding interactions, sequentially, in an autoregressive manner. Our method can generate videos of multiple custom concepts (subjects, action and background) such as a teddy bear running towards a brown teapot, a dog playing violin and a teddy bear swimming in the ocean. We quantitatively evaluate our method using videoCLIP and DINO scores, in addition to human evaluation. Videos for results presented in this paper can be found at https://github.com/divyakraman/MultiConceptVideo2024.
StoryBench: A Multifaceted Benchmark for Continuous Story Visualization
Aug 22, 2023



Generating video stories from text prompts is a complex task. In addition to having high visual quality, videos need to realistically adhere to a sequence of text prompts whilst being consistent throughout the frames. Creating a benchmark for video generation requires data annotated over time, which contrasts with the single caption used often in video datasets. To fill this gap, we collect comprehensive human annotations on three existing datasets, and introduce StoryBench: a new, challenging multi-task benchmark to reliably evaluate forthcoming text-to-video models. Our benchmark includes three video generation tasks of increasing difficulty: action execution, where the next action must be generated starting from a conditioning video; story continuation, where a sequence of actions must be executed starting from a conditioning video; and story generation, where a video must be generated from only text prompts. We evaluate small yet strong text-to-video baselines, and show the benefits of training on story-like data algorithmically generated from existing video captions. Finally, we establish guidelines for human evaluation of video stories, and reaffirm the need of better automatic metrics for video generation. StoryBench aims at encouraging future research efforts in this exciting new area.
Phenaki: Variable Length Video Generation From Open Domain Textual Description
Oct 05, 2022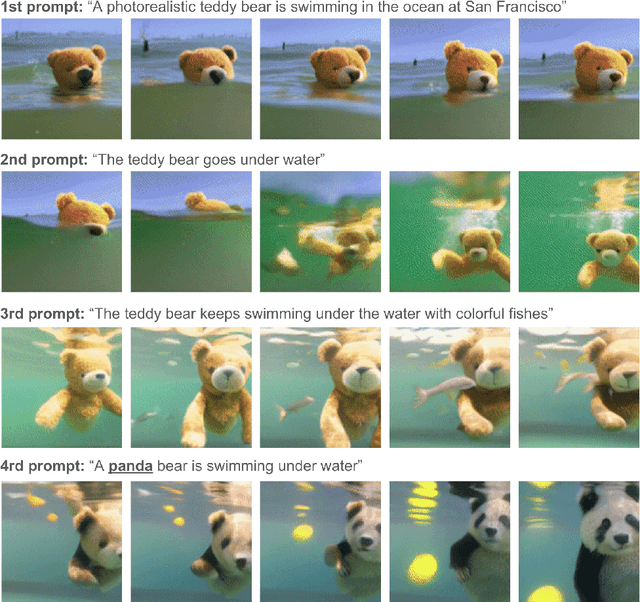
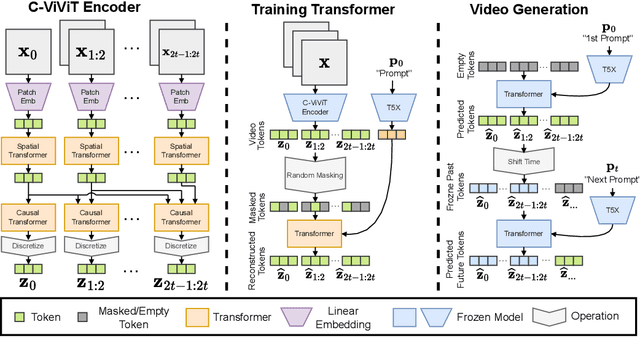
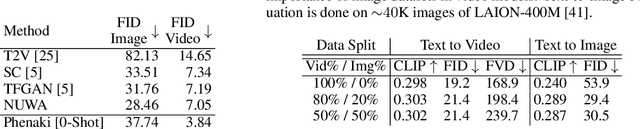
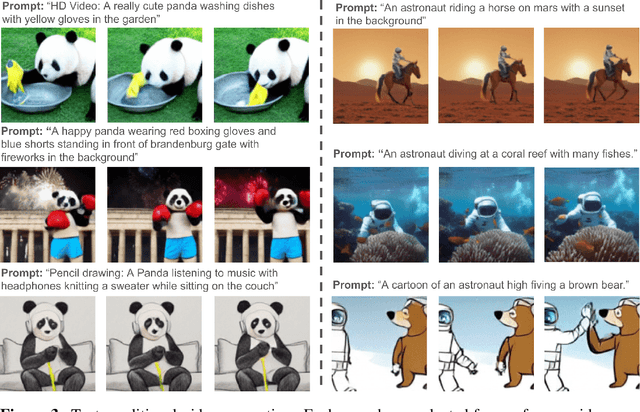
We present Phenaki, a model capable of realistic video synthesis, given a sequence of textual prompts. Generating videos from text is particularly challenging due to the computational cost, limited quantities of high quality text-video data and variable length of videos. To address these issues, we introduce a new model for learning video representation which compresses the video to a small representation of discrete tokens. This tokenizer uses causal attention in time, which allows it to work with variable-length videos. To generate video tokens from text we are using a bidirectional masked transformer conditioned on pre-computed text tokens. The generated video tokens are subsequently de-tokenized to create the actual video. To address data issues, we demonstrate how joint training on a large corpus of image-text pairs as well as a smaller number of video-text examples can result in generalization beyond what is available in the video datasets. Compared to the previous video generation methods, Phenaki can generate arbitrary long videos conditioned on a sequence of prompts (i.e. time variable text or a story) in open domain. To the best of our knowledge, this is the first time a paper studies generating videos from time variable prompts. In addition, compared to the per-frame baselines, the proposed video encoder-decoder computes fewer tokens per video but results in better spatio-temporal consistency.
INFOrmation Prioritization through EmPOWERment in Visual Model-Based RL
Apr 18, 2022



Model-based reinforcement learning (RL) algorithms designed for handling complex visual observations typically learn some sort of latent state representation, either explicitly or implicitly. Standard methods of this sort do not distinguish between functionally relevant aspects of the state and irrelevant distractors, instead aiming to represent all available information equally. We propose a modified objective for model-based RL that, in combination with mutual information maximization, allows us to learn representations and dynamics for visual model-based RL without reconstruction in a way that explicitly prioritizes functionally relevant factors. The key principle behind our design is to integrate a term inspired by variational empowerment into a state-space model based on mutual information. This term prioritizes information that is correlated with action, thus ensuring that functionally relevant factors are captured first. Furthermore, the same empowerment term also promotes faster exploration during the RL process, especially for sparse-reward tasks where the reward signal is insufficient to drive exploration in the early stages of learning. We evaluate the approach on a suite of vision-based robot control tasks with natural video backgrounds, and show that the proposed prioritized information objective outperforms state-of-the-art model based RL approaches with higher sample efficiency and episodic returns. https://sites.google.com/view/information-empowerment
FitVid: Overfitting in Pixel-Level Video Prediction
Jun 24, 2021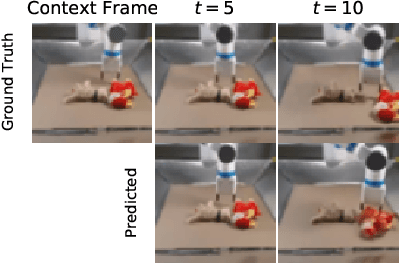
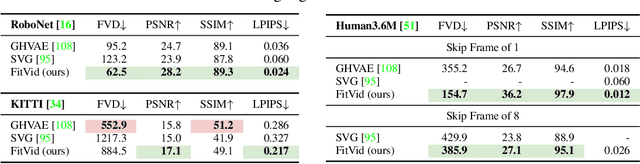
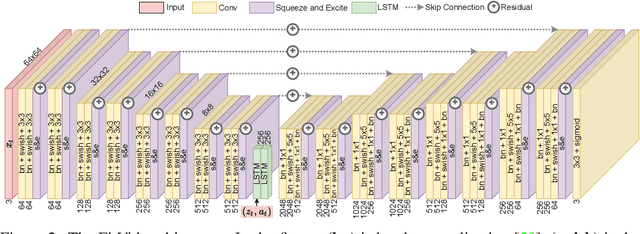
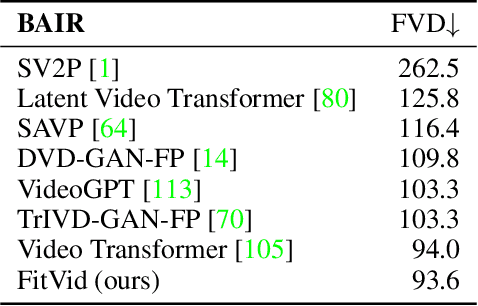
An agent that is capable of predicting what happens next can perform a variety of tasks through planning with no additional training. Furthermore, such an agent can internally represent the complex dynamics of the real-world and therefore can acquire a representation useful for a variety of visual perception tasks. This makes predicting the future frames of a video, conditioned on the observed past and potentially future actions, an interesting task which remains exceptionally challenging despite many recent advances. Existing video prediction models have shown promising results on simple narrow benchmarks but they generate low quality predictions on real-life datasets with more complicated dynamics or broader domain. There is a growing body of evidence that underfitting on the training data is one of the primary causes for the low quality predictions. In this paper, we argue that the inefficient use of parameters in the current video models is the main reason for underfitting. Therefore, we introduce a new architecture, named FitVid, which is capable of severe overfitting on the common benchmarks while having similar parameter count as the current state-of-the-art models. We analyze the consequences of overfitting, illustrating how it can produce unexpected outcomes such as generating high quality output by repeating the training data, and how it can be mitigated using existing image augmentation techniques. As a result, FitVid outperforms the current state-of-the-art models across four different video prediction benchmarks on four different metrics.
Models, Pixels, and Rewards: Evaluating Design Trade-offs in Visual Model-Based Reinforcement Learning
Dec 08, 2020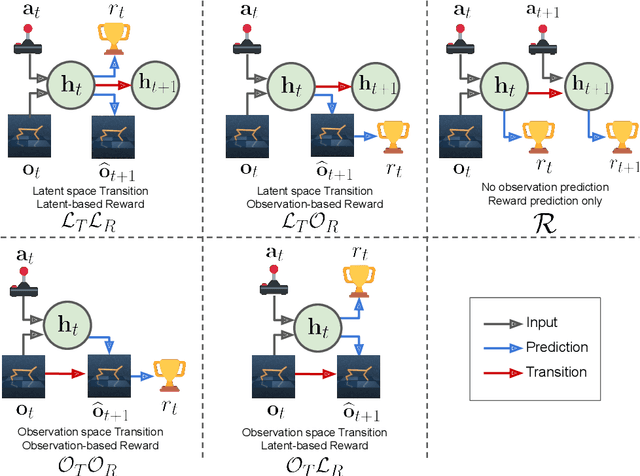
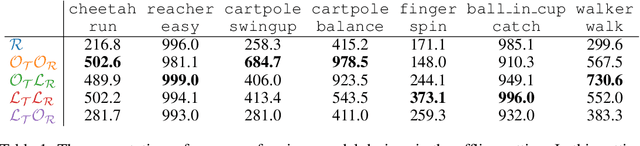
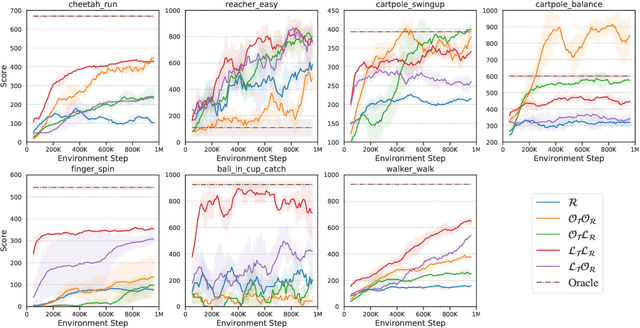
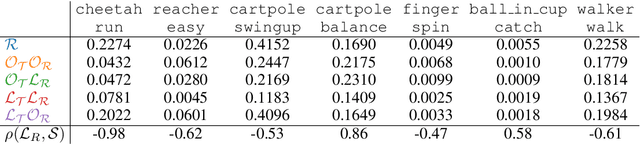
Model-based reinforcement learning (MBRL) methods have shown strong sample efficiency and performance across a variety of tasks, including when faced with high-dimensional visual observations. These methods learn to predict the environment dynamics and expected reward from interaction and use this predictive model to plan and perform the task. However, MBRL methods vary in their fundamental design choices, and there is no strong consensus in the literature on how these design decisions affect performance. In this paper, we study a number of design decisions for the predictive model in visual MBRL algorithms, focusing specifically on methods that use a predictive model for planning. We find that a range of design decisions that are often considered crucial, such as the use of latent spaces, have little effect on task performance. A big exception to this finding is that predicting future observations (i.e., images) leads to significant task performance improvement compared to only predicting rewards. We also empirically find that image prediction accuracy, somewhat surprisingly, correlates more strongly with downstream task performance than reward prediction accuracy. We show how this phenomenon is related to exploration and how some of the lower-scoring models on standard benchmarks (that require exploration) will perform the same as the best-performing models when trained on the same training data. Simultaneously, in the absence of exploration, models that fit the data better usually perform better on the downstream task as well, but surprisingly, these are often not the same models that perform the best when learning and exploring from scratch. These findings suggest that performance and exploration place important and potentially contradictory requirements on the model.
Model-Based Reinforcement Learning for Atari
Mar 05, 2019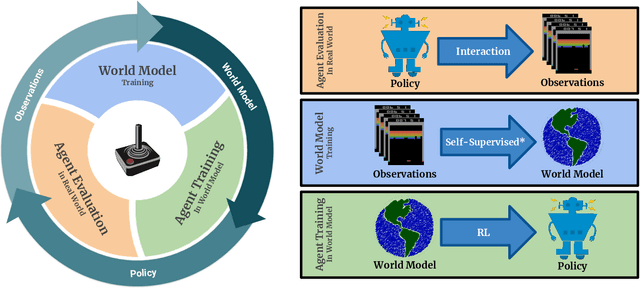
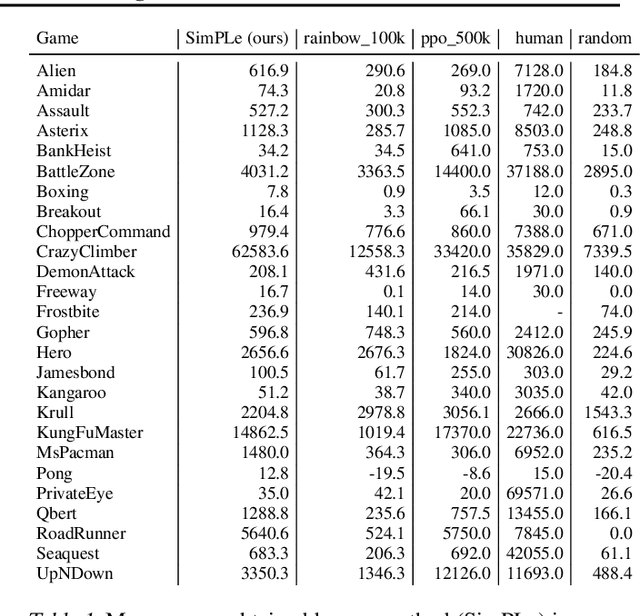
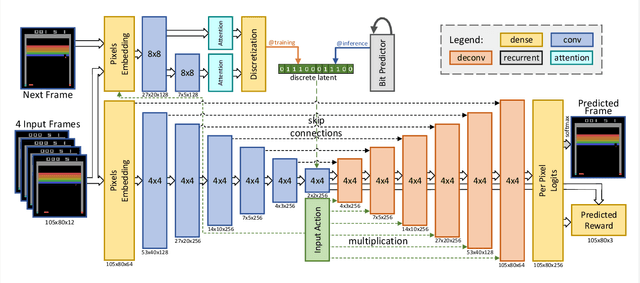
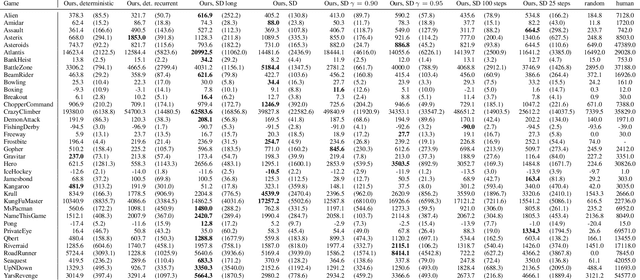
Model-free reinforcement learning (RL) can be used to learn effective policies for complex tasks, such as Atari games, even from image observations. However, this typically requires very large amounts of interaction -- substantially more, in fact, than a human would need to learn the same games. How can people learn so quickly? Part of the answer may be that people can learn how the game works and predict which actions will lead to desirable outcomes. In this paper, we explore how video prediction models can similarly enable agents to solve Atari games with orders of magnitude fewer interactions than model-free methods. We describe Simulated Policy Learning (SimPLe), a complete model-based deep RL algorithm based on video prediction models and present a comparison of several model architectures, including a novel architecture that yields the best results in our setting. Our experiments evaluate SimPLe on a range of Atari games and achieve competitive results with only 100K interactions between the agent and the environment (400K frames), which corresponds to about two hours of real-time play.
VideoFlow: A Flow-Based Generative Model for Video
Mar 04, 2019


Generative models that can model and predict sequences of future events can, in principle, learn to capture complex real-world phenomena, such as physical interactions. In particular, learning predictive models of videos offers an especially appealing mechanism to enable a rich understanding of the physical world: videos of real-world interactions are plentiful and readily available, and a model that can predict future video frames can not only capture useful representations of the world, but can be useful in its own right, for problems such as model-based robotic control. However, a central challenge in video prediction is that the future is highly uncertain: a sequence of past observations of events can imply many possible futures. Although a number of recent works have studied probabilistic models that can represent uncertain futures, such models are either extremely expensive computationally (as in the case of pixel-level autoregressive models), or do not directly optimize the likelihood of the data. In this work, we propose a model for video prediction based on normalizing flows, which allows for direct optimization of the data likelihood, and produces high-quality stochastic predictions. To our knowledge, our work is the first to propose multi-frame video prediction with normalizing flows. We describe an approach for modeling the latent space dynamics, and demonstrate that flow-based generative models offer a viable and competitive approach to generative modeling of video.
Adjustable Real-time Style Transfer
Nov 21, 2018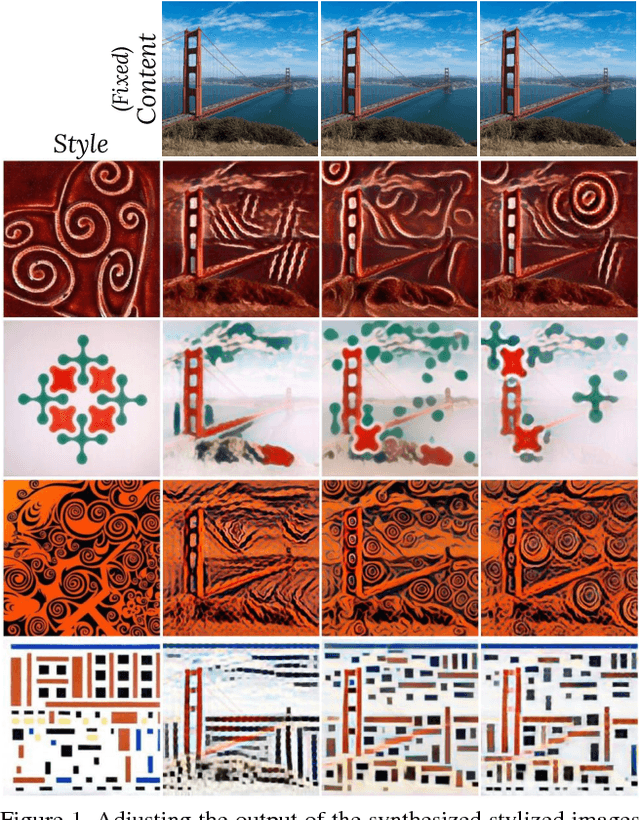
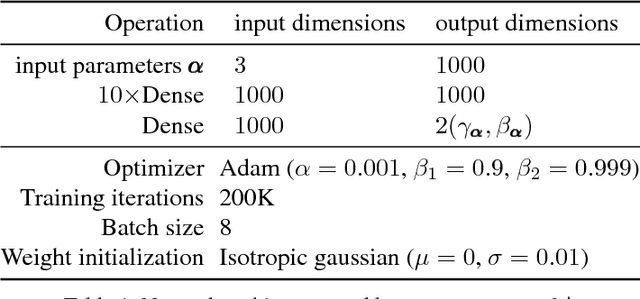
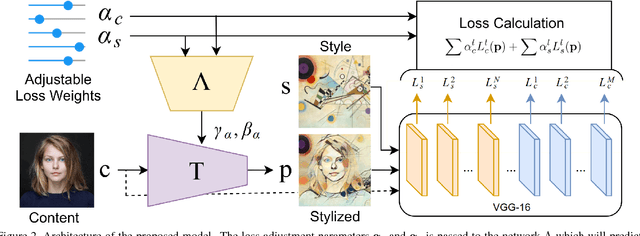
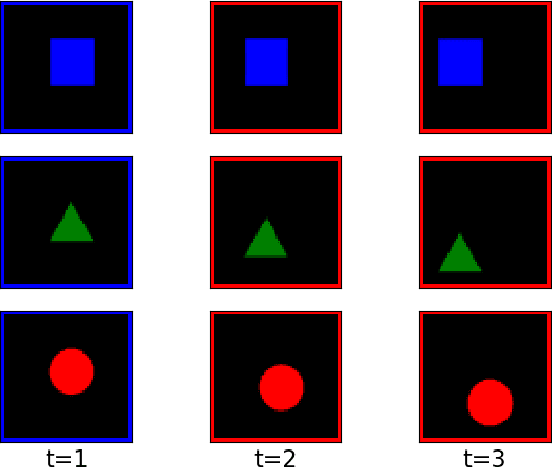
Artistic style transfer is the problem of synthesizing an image with content similar to a given image and style similar to another. Although recent feed-forward neural networks can generate stylized images in real-time, these models produce a single stylization given a pair of style/content images, and the user doesn't have control over the synthesized output. Moreover, the style transfer depends on the hyper-parameters of the model with varying "optimum" for different input images. Therefore, if the stylized output is not appealing to the user, she/he has to try multiple models or retrain one with different hyper-parameters to get a favorite stylization. In this paper, we address these issues by proposing a novel method which allows adjustment of crucial hyper-parameters, after the training and in real-time, through a set of manually adjustable parameters. These parameters enable the user to modify the synthesized outputs from the same pair of style/content images, in search of a favorite stylized image. Our quantitative and qualitative experiments indicate how adjusting these parameters is comparable to retraining the model with different hyper-parameters. We also demonstrate how these parameters can be randomized to generate results which are diverse but still very similar in style and content.
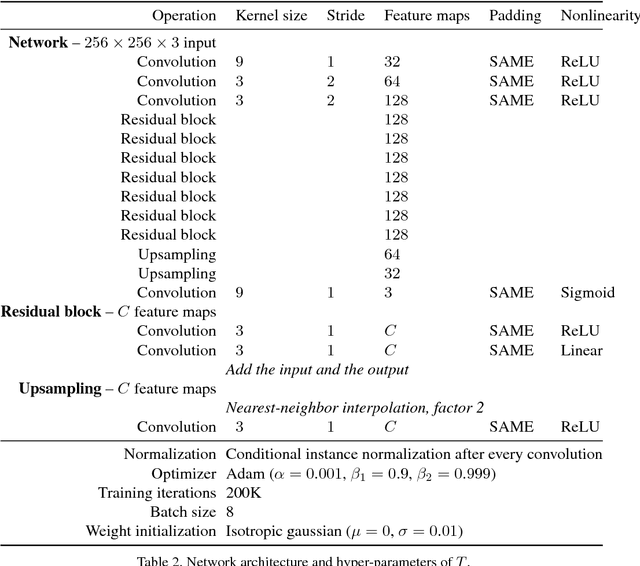
Time Reversal as Self-Supervision
Oct 02, 2018


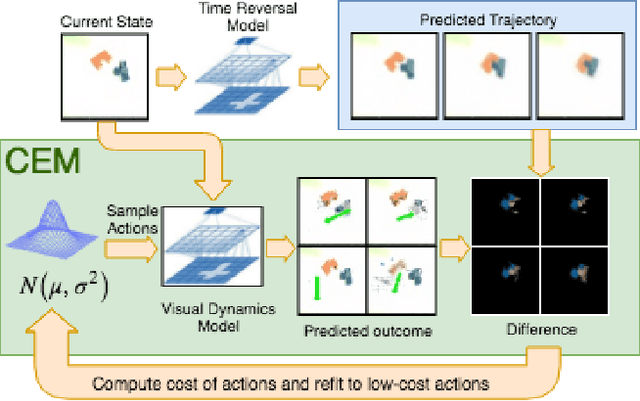
A longstanding challenge in robot learning for manipulation tasks has been the ability to generalize to varying initial conditions, diverse objects, and changing objectives. Learning based approaches have shown promise in producing robust policies, but require heavy supervision to efficiently learn precise control, especially from visual inputs. We propose a novel self-supervision technique that uses time-reversal to learn goals and provide a high level plan to reach them. In particular, we introduce the time-reversal model (TRM), a self-supervised model which explores outward from a set of goal states and learns to predict these trajectories in reverse. This provides a high level plan towards goals, allowing us to learn complex manipulation tasks with no demonstrations or exploration at test time. We test our method on the domain of assembly, specifically the mating of tetris-style block pairs. Using our method operating atop visual model predictive control, we are able to assemble tetris blocks on a physical robot using only uncalibrated RGB camera input, and generalize to unseen block pairs. sites.google.com/view/time-reversal