 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime Reversal as Self-Supervision
Paper and Code
Oct 02, 2018


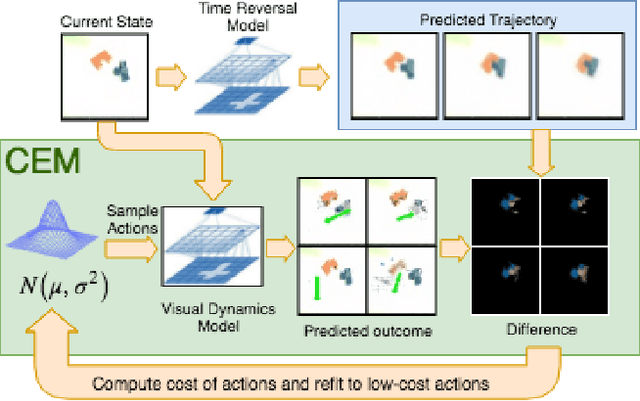
A longstanding challenge in robot learning for manipulation tasks has been the ability to generalize to varying initial conditions, diverse objects, and changing objectives. Learning based approaches have shown promise in producing robust policies, but require heavy supervision to efficiently learn precise control, especially from visual inputs. We propose a novel self-supervision technique that uses time-reversal to learn goals and provide a high level plan to reach them. In particular, we introduce the time-reversal model (TRM), a self-supervised model which explores outward from a set of goal states and learns to predict these trajectories in reverse. This provides a high level plan towards goals, allowing us to learn complex manipulation tasks with no demonstrations or exploration at test time. We test our method on the domain of assembly, specifically the mating of tetris-style block pairs. Using our method operating atop visual model predictive control, we are able to assemble tetris blocks on a physical robot using only uncalibrated RGB camera input, and generalize to unseen block pairs. sites.google.com/view/time-reversal