 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboInter: A Holistic Intermediate Representation Suite Towards Robotic Manipulation
Feb 10, 2026Advances in large vision-language models (VLMs) have stimulated growing interest in vision-language-action (VLA) systems for robot manipulation. However, existing manipulation datasets remain costly to curate, highly embodiment-specific, and insufficient in coverage and diversity, thereby hindering the generalization of VLA models. Recent approaches attempt to mitigate these limitations via a plan-then-execute paradigm, where high-level plans (e.g., subtasks, trace) are first generated and subsequently translated into low-level actions, but they critically rely on extra intermediate supervision, which is largely absent from existing datasets. To bridge this gap, we introduce the RoboInter Manipulation Suite, a unified resource including data, benchmarks, and models of intermediate representations for manipulation. It comprises RoboInter-Tool, a lightweight GUI that enables semi-automatic annotation of diverse representations, and RoboInter-Data, a large-scale dataset containing over 230k episodes across 571 diverse scenes, which provides dense per-frame annotations over more than 10 categories of intermediate representations, substantially exceeding prior work in scale and annotation quality. Building upon this foundation, RoboInter-VQA introduces 9 spatial and 20 temporal embodied VQA categories to systematically benchmark and enhance the embodied reasoning capabilities of VLMs. Meanwhile, RoboInter-VLA offers an integrated plan-then-execute framework, supporting modular and end-to-end VLA variants that bridge high-level planning with low-level execution via intermediate supervision. In total, RoboInter establishes a practical foundation for advancing robust and generalizable robotic learning via fine-grained and diverse intermediate representations.
LLaVA-CMoE: Towards Continual Mixture of Experts for Large Vision-Language Models
Mar 27, 2025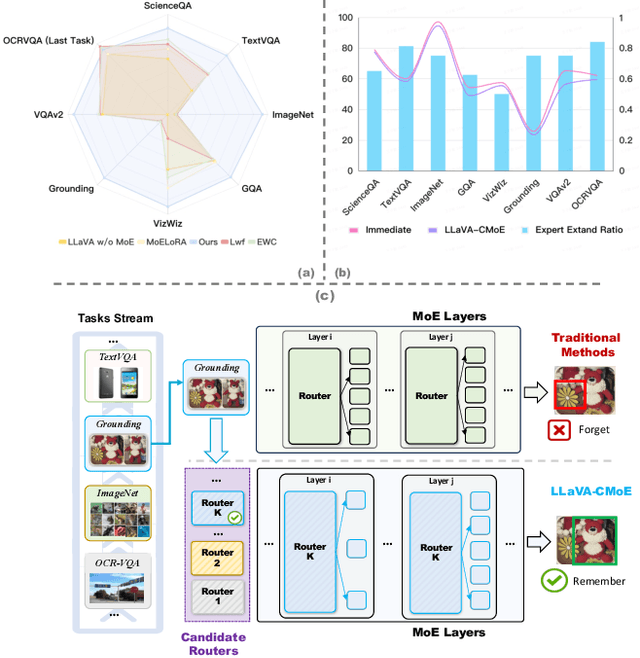
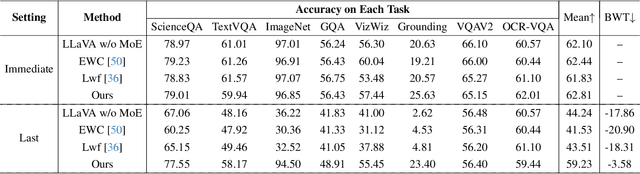
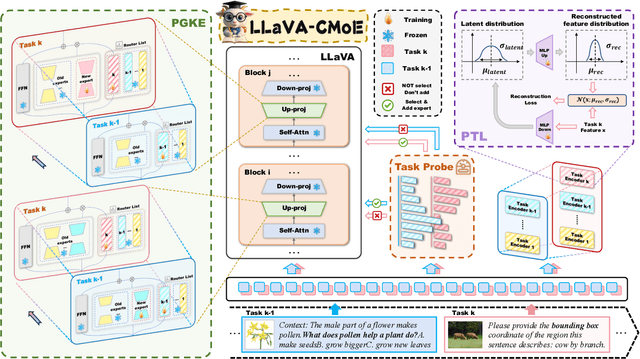
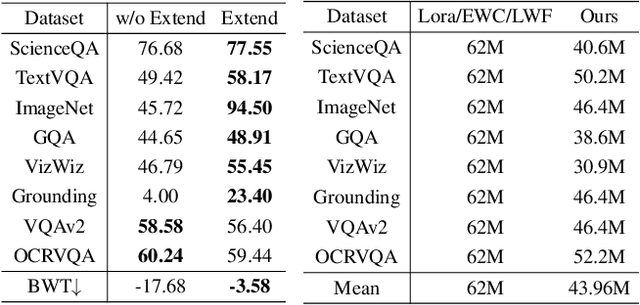
Although applying Mixture of Experts to large language models for learning new tasks is widely regarded as an effective strategy for continuous learning, there still remain two major challenges: (1) As the number of tasks grows, simple parameter expansion strategies can lead to excessively large models. (2) Modifying the parameters of the existing router results in the erosion of previously acquired knowledge. In this paper, we present an innovative framework named LLaVA-CMoE, which is a continuous Mixture of Experts (MoE) architecture without any replay data. Specifically, we have developed a method called Probe-Guided Knowledge Extension (PGKE), which employs probe experts to assess whether additional knowledge is required for a specific layer. This approach enables the model to adaptively expand its network parameters based on task distribution, thereby significantly improving the efficiency of parameter expansion. Additionally, we introduce a hierarchical routing algorithm called Probabilistic Task Locator (PTL), where high-level routing captures inter-task information and low-level routing focuses on intra-task details, ensuring that new task experts do not interfere with existing ones. Our experiments shows that our efficient architecture has substantially improved model performance on the Coin benchmark while maintaining a reasonable parameter count.
Towards Realistic UAV Vision-Language Navigation: Platform, Benchmark, and Methodology
Oct 10, 2024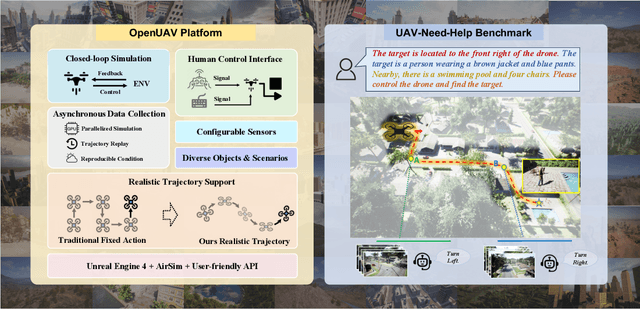
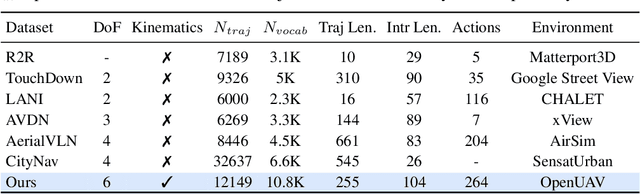
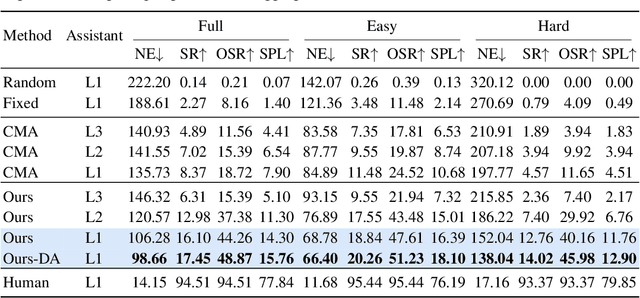
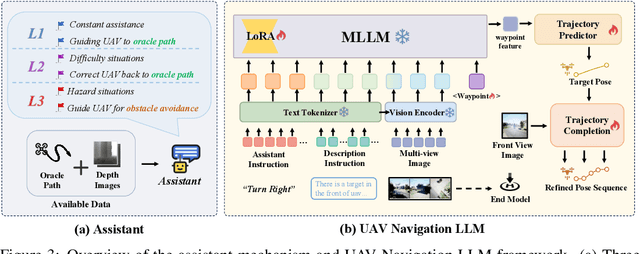
Developing agents capable of navigating to a target location based on language instructions and visual information, known as vision-language navigation (VLN), has attracted widespread interest. Most research has focused on ground-based agents, while UAV-based VLN remains relatively underexplored. Recent efforts in UAV vision-language navigation predominantly adopt ground-based VLN settings, relying on predefined discrete action spaces and neglecting the inherent disparities in agent movement dynamics and the complexity of navigation tasks between ground and aerial environments. To address these disparities and challenges, we propose solutions from three perspectives: platform, benchmark, and methodology. To enable realistic UAV trajectory simulation in VLN tasks, we propose the OpenUAV platform, which features diverse environments, realistic flight control, and extensive algorithmic support. We further construct a target-oriented VLN dataset consisting of approximately 12k trajectories on this platform, serving as the first dataset specifically designed for realistic UAV VLN tasks. To tackle the challenges posed by complex aerial environments, we propose an assistant-guided UAV object search benchmark called UAV-Need-Help, which provides varying levels of guidance information to help UAVs better accomplish realistic VLN tasks. We also propose a UAV navigation LLM that, given multi-view images, task descriptions, and assistant instructions, leverages the multimodal understanding capabilities of the MLLM to jointly process visual and textual information, and performs hierarchical trajectory generation. The evaluation results of our method significantly outperform the baseline models, while there remains a considerable gap between our results and those achieved by human operators, underscoring the challenge presented by the UAV-Need-Help task.
Asynchronous Large Language Model Enhanced Planner for Autonomous Driving
Jun 20, 2024



Despite real-time planners exhibiting remarkable performance in autonomous driving, the growing exploration of Large Language Models (LLMs) has opened avenues for enhancing the interpretability and controllability of motion planning. Nevertheless, LLM-based planners continue to encounter significant challenges, including elevated resource consumption and extended inference times, which pose substantial obstacles to practical deployment. In light of these challenges, we introduce AsyncDriver, a new asynchronous LLM-enhanced closed-loop framework designed to leverage scene-associated instruction features produced by LLM to guide real-time planners in making precise and controllable trajectory predictions. On one hand, our method highlights the prowess of LLMs in comprehending and reasoning with vectorized scene data and a series of routing instructions, demonstrating its effective assistance to real-time planners. On the other hand, the proposed framework decouples the inference processes of the LLM and real-time planners. By capitalizing on the asynchronous nature of their inference frequencies, our approach have successfully reduced the computational cost introduced by LLM, while maintaining comparable performance. Experiments show that our approach achieves superior closed-loop evaluation performance on nuPlan's challenging scenarios.
CooHOI: Learning Cooperative Human-Object Interaction with Manipulated Object Dynamics
Jun 20, 2024
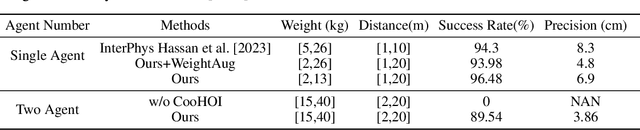
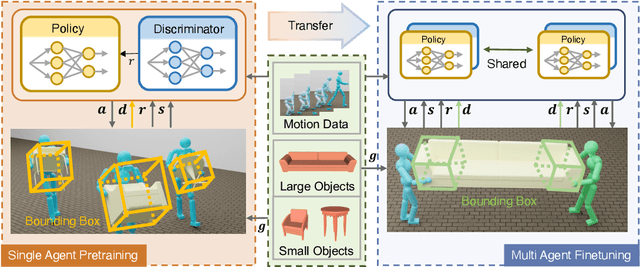
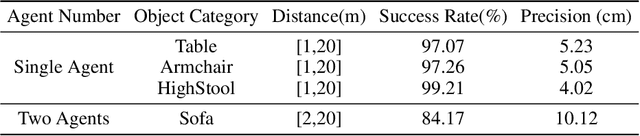
Recent years have seen significant advancements in humanoid control, largely due to the availability of large-scale motion capture data and the application of reinforcement learning methodologies. However, many real-world tasks, such as moving large and heavy furniture, require multi-character collaboration. Given the scarcity of data on multi-character collaboration and the efficiency challenges associated with multi-agent learning, these tasks cannot be straightforwardly addressed using training paradigms designed for single-agent scenarios. In this paper, we introduce Cooperative Human-Object Interaction (CooHOI), a novel framework that addresses multi-character objects transporting through a two-phase learning paradigm: individual skill acquisition and subsequent transfer. Initially, a single agent learns to perform tasks using the Adversarial Motion Priors (AMP) framework. Following this, the agent learns to collaborate with others by considering the shared dynamics of the manipulated object during parallel training using Multi Agent Proximal Policy Optimization (MAPPO). When one agent interacts with the object, resulting in specific object dynamics changes, the other agents learn to respond appropriately, thereby achieving implicit communication and coordination between teammates. Unlike previous approaches that relied on tracking-based methods for multi-character HOI, CooHOI is inherently efficient, does not depend on motion capture data of multi-character interactions, and can be seamlessly extended to include more participants and a wide range of object types
Octavius: Mitigating Task Interference in MLLMs via MoE
Nov 05, 2023Recent studies have demonstrated Large Language Models (LLMs) can extend their zero-shot generalization capabilities to multimodal learning through instruction tuning. As more modalities and downstream tasks are introduced, negative conflicts and interference may have a worse impact on performance. While this phenomenon has been overlooked in previous work, we propose a novel and extensible framework, called \mname, for comprehensive studies and experimentation on multimodal learning with Multimodal Large Language Models (MLLMs). Specifically, we combine the well-known Mixture-of-Experts (MoE) and one of the representative PEFT techniques, \emph{i.e.,} LoRA, designing a novel LLM-based decoder, called LoRA-MoE, for multimodal learning. The experimental results (about 20\% improvement) have shown the effectiveness and versatility of our design in various 2D and 3D downstream tasks. Code and corresponding dataset will be available soon.
VL-SAT: Visual-Linguistic Semantics Assisted Training for 3D Semantic Scene Graph Prediction in Point Cloud
Mar 25, 2023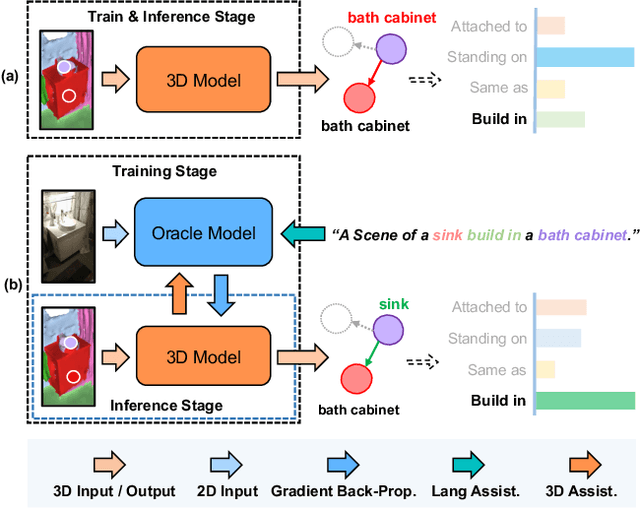

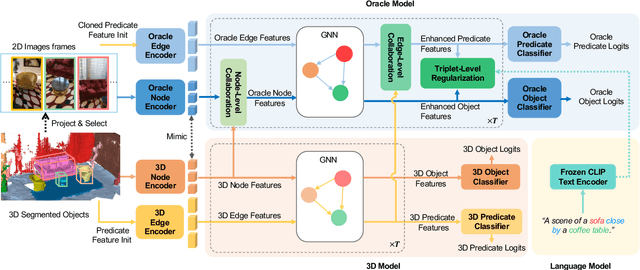
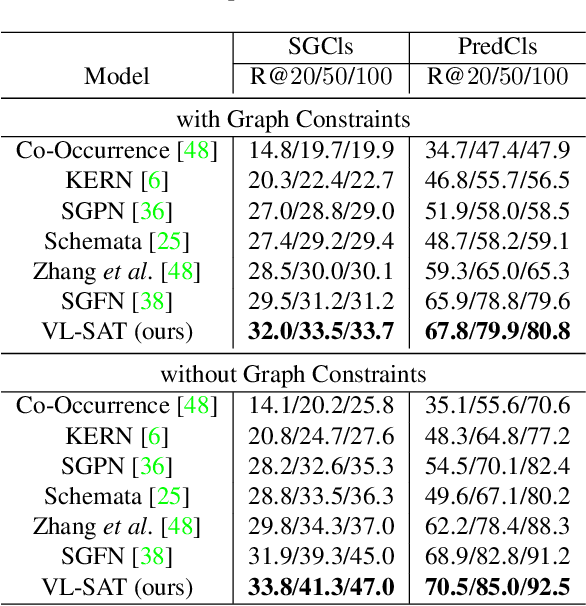
The task of 3D semantic scene graph (3DSSG) prediction in the point cloud is challenging since (1) the 3D point cloud only captures geometric structures with limited semantics compared to 2D images, and (2) long-tailed relation distribution inherently hinders the learning of unbiased prediction. Since 2D images provide rich semantics and scene graphs are in nature coped with languages, in this study, we propose Visual-Linguistic Semantics Assisted Training (VL-SAT) scheme that can significantly empower 3DSSG prediction models with discrimination about long-tailed and ambiguous semantic relations. The key idea is to train a powerful multi-modal oracle model to assist the 3D model. This oracle learns reliable structural representations based on semantics from vision, language, and 3D geometry, and its benefits can be heterogeneously passed to the 3D model during the training stage. By effectively utilizing visual-linguistic semantics in training, our VL-SAT can significantly boost common 3DSSG prediction models, such as SGFN and SGGpoint, only with 3D inputs in the inference stage, especially when dealing with tail relation triplets. Comprehensive evaluations and ablation studies on the 3DSSG dataset have validated the effectiveness of the proposed scheme. Code is available at https://github.com/wz7in/CVPR2023-VLSAT.
Spatial Information Guided Convolution for Real-Time RGBD Semantic Segmentation
Apr 09, 2020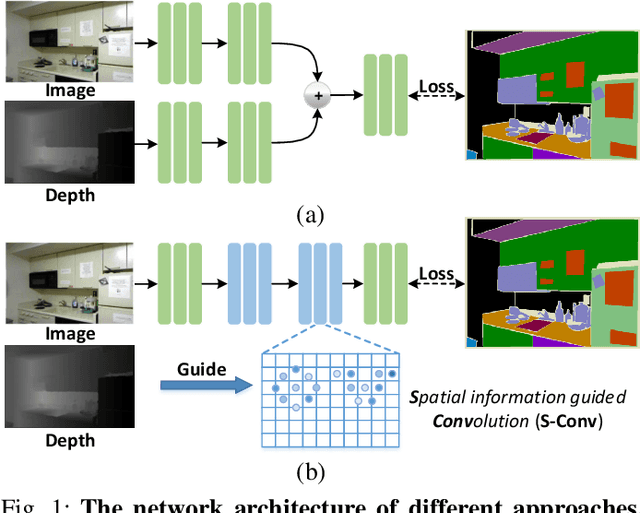
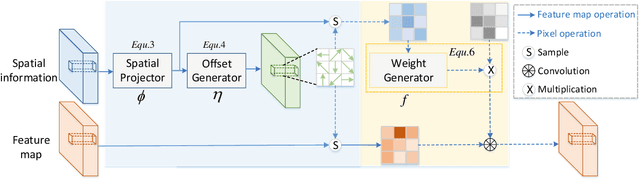
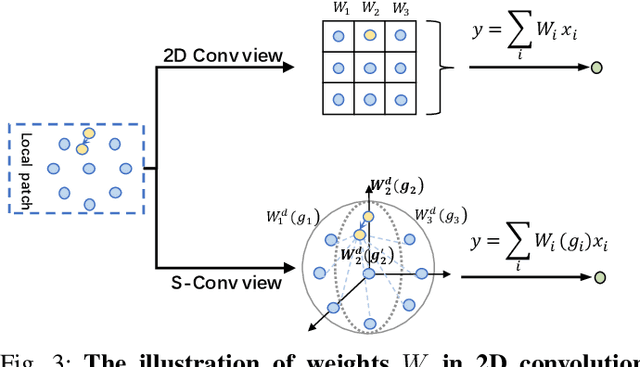
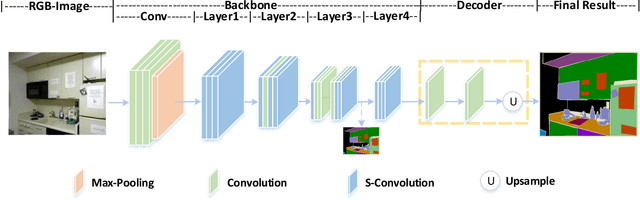
3D spatial information is known to be beneficial to the semantic segmentation task. Most existing methods take 3D spatial data as an additional input, leading to a two-stream segmentation network that processes RGB and 3D spatial information separately. This solution greatly increases the inference time and severely limits its scope for real-time applications. To solve this problem, we propose Spatial information guided Convolution (S-Conv), which allows efficient RGB feature and 3D spatial information integration. S-Conv is competent to infer the sampling offset of the convolution kernel guided by the 3D spatial information, helping the convolutional layer adjust the receptive field and adapt to geometric transformations. S-Conv also incorporates geometric information into the feature learning process by generating spatially adaptive convolutional weights. The capability of perceiving geometry is largely enhanced without much affecting the amount of parameters and computational cost. We further embed S-Conv into a semantic segmentation network, called Spatial information Guided convolutional Network (SGNet), resulting in real-time inference and state-of-the-art performance on NYUDv2 and SUNRGBD datasets.
RANet: Ranking Attention Network for Fast Video Object Segmentation
Sep 08, 2019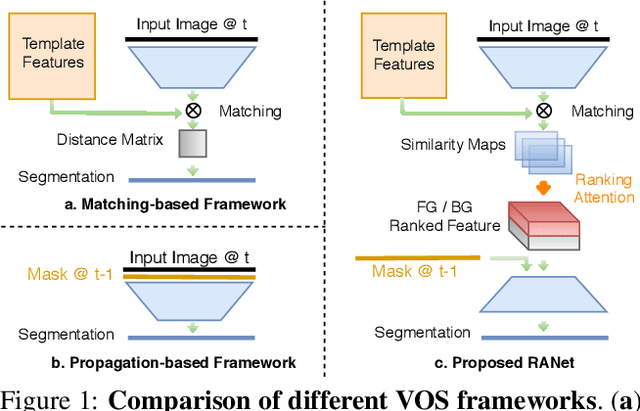
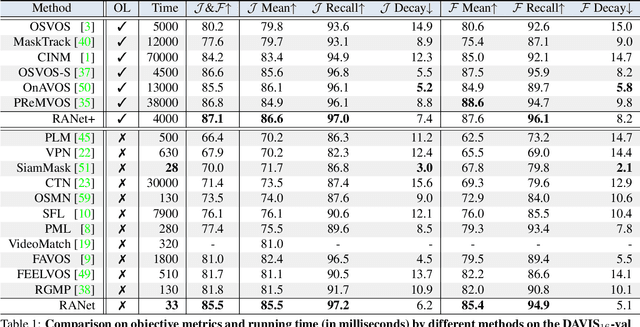
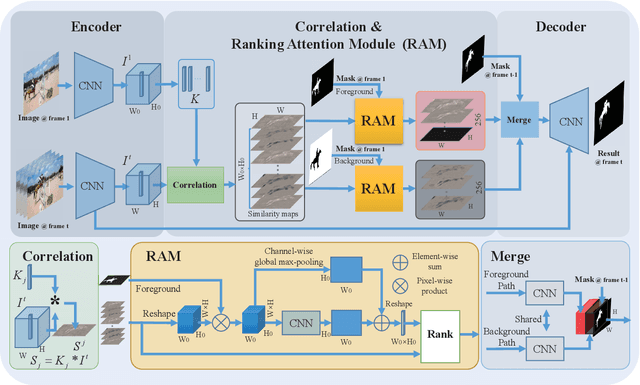
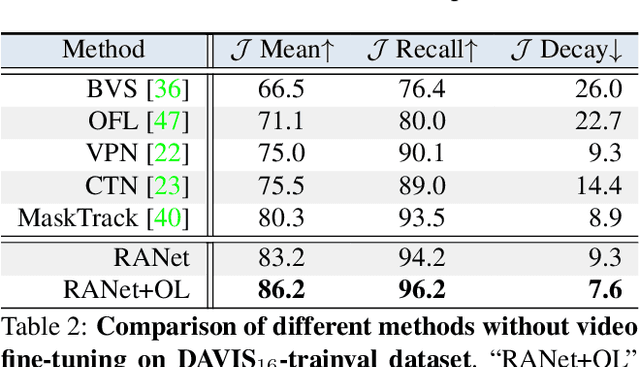
Despite online learning (OL) techniques have boosted the performance of semi-supervised video object segmentation (VOS) methods, the huge time costs of OL greatly restrict their practicality. Matching based and propagation based methods run at a faster speed by avoiding OL techniques. However, they are limited by sub-optimal accuracy, due to mismatching and drifting problems. In this paper, we develop a real-time yet very accurate Ranking Attention Network (RANet) for VOS. Specifically, to integrate the insights of matching based and propagation based methods, we employ an encoder-decoder framework to learn pixel-level similarity and segmentation in an end-to-end manner. To better utilize the similarity maps, we propose a novel ranking attention module, which automatically ranks and selects these maps for fine-grained VOS performance. Experiments on DAVIS-16 and DAVIS-17 datasets show that our RANet achieves the best speed-accuracy trade-off, e.g., with 33 milliseconds per frame and J&F=85.5% on DAVIS-16. With OL, our RANet reaches J&F=87.1% on DAVIS-16, exceeding state-of-the-art VOS methods. The code can be found at https://github.com/Storife/RANet.