 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePandaPose: 3D Human Pose Lifting from a Single Image via Propagating 2D Pose Prior to 3D Anchor Space
Feb 01, 20263D human pose lifting from a single RGB image is a challenging task in 3D vision. Existing methods typically establish a direct joint-to-joint mapping from 2D to 3D poses based on 2D features. This formulation suffers from two fundamental limitations: inevitable error propagation from input predicted 2D pose to 3D predictions and inherent difficulties in handling self-occlusion cases. In this paper, we propose PandaPose, a 3D human pose lifting approach via propagating 2D pose prior to 3D anchor space as the unified intermediate representation. Specifically, our 3D anchor space comprises: (1) Joint-wise 3D anchors in the canonical coordinate system, providing accurate and robust priors to mitigate 2D pose estimation inaccuracies. (2) Depth-aware joint-wise feature lifting that hierarchically integrates depth information to resolve self-occlusion ambiguities. (3) The anchor-feature interaction decoder that incorporates 3D anchors with lifted features to generate unified anchor queries encapsulating joint-wise 3D anchor set, visual cues and geometric depth information. The anchor queries are further employed to facilitate anchor-to-joint ensemble prediction. Experiments on three well-established benchmarks (i.e., Human3.6M, MPI-INF-3DHP and 3DPW) demonstrate the superiority of our proposition. The substantial reduction in error by $14.7\%$ compared to SOTA methods on the challenging conditions of Human3.6M and qualitative comparisons further showcase the effectiveness and robustness of our approach.
BokehFlow: Depth-Free Controllable Bokeh Rendering via Flow Matching
Nov 19, 2025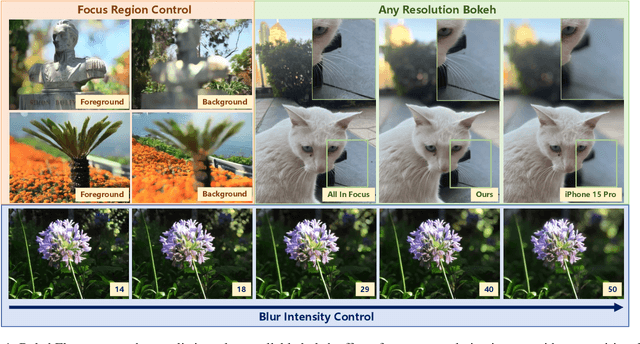
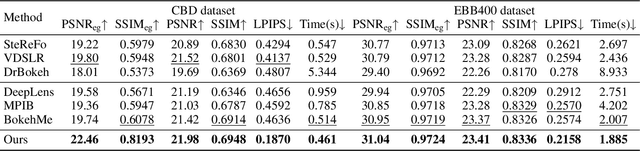
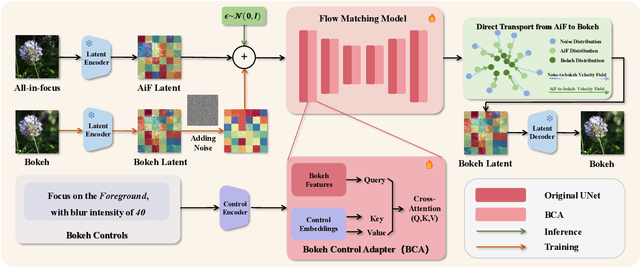
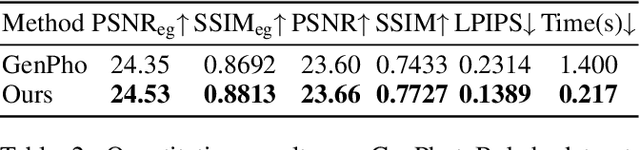
Bokeh rendering simulates the shallow depth-of-field effect in photography, enhancing visual aesthetics and guiding viewer attention to regions of interest. Although recent approaches perform well, rendering controllable bokeh without additional depth inputs remains a significant challenge. Existing classical and neural controllable methods rely on accurate depth maps, while generative approaches often struggle with limited controllability and efficiency. In this paper, we propose BokehFlow, a depth-free framework for controllable bokeh rendering based on flow matching. BokehFlow directly synthesizes photorealistic bokeh effects from all-in-focus images, eliminating the need for depth inputs. It employs a cross-attention mechanism to enable semantic control over both focus regions and blur intensity via text prompts. To support training and evaluation, we collect and synthesize four datasets. Extensive experiments demonstrate that BokehFlow achieves visually compelling bokeh effects and offers precise control, outperforming existing depth-dependent and generative methods in both rendering quality and efficiency.
Semi-Supervised High Dynamic Range Image Reconstructing via Bi-Level Uncertain Area Masking
Nov 17, 2025Reconstructing high dynamic range (HDR) images from low dynamic range (LDR) bursts plays an essential role in the computational photography. Impressive progress has been achieved by learning-based algorithms which require LDR-HDR image pairs. However, these pairs are hard to obtain, which motivates researchers to delve into the problem of annotation-efficient HDR image reconstructing: how to achieve comparable performance with limited HDR ground truths (GTs). This work attempts to address this problem from the view of semi-supervised learning where a teacher model generates pseudo HDR GTs for the LDR samples without GTs and a student model learns from pseudo GTs. Nevertheless, the confirmation bias, i.e., the student may learn from the artifacts in pseudo HDR GTs, presents an impediment. To remove this impediment, an uncertainty-based masking process is proposed to discard unreliable parts of pseudo GTs at both pixel and patch levels, then the trusted areas can be learned from by the student. With this novel masking process, our semi-supervised HDR reconstructing method not only outperforms previous annotation-efficient algorithms, but also achieves comparable performance with up-to-date fully-supervised methods by using only 6.7% HDR GTs.
Generative Photographic Control for Scene-Consistent Video Cinematic Editing
Nov 17, 2025Cinematic storytelling is profoundly shaped by the artful manipulation of photographic elements such as depth of field and exposure. These effects are crucial in conveying mood and creating aesthetic appeal. However, controlling these effects in generative video models remains highly challenging, as most existing methods are restricted to camera motion control. In this paper, we propose CineCtrl, the first video cinematic editing framework that provides fine control over professional camera parameters (e.g., bokeh, shutter speed). We introduce a decoupled cross-attention mechanism to disentangle camera motion from photographic inputs, allowing fine-grained, independent control without compromising scene consistency. To overcome the shortage of training data, we develop a comprehensive data generation strategy that leverages simulated photographic effects with a dedicated real-world collection pipeline, enabling the construction of a large-scale dataset for robust model training. Extensive experiments demonstrate that our model generates high-fidelity videos with precisely controlled, user-specified photographic camera effects.
Identity-Preserving Image-to-Video Generation via Reward-Guided Optimization
Oct 16, 2025Recent advances in image-to-video (I2V) generation have achieved remarkable progress in synthesizing high-quality, temporally coherent videos from static images. Among all the applications of I2V, human-centric video generation includes a large portion. However, existing I2V models encounter difficulties in maintaining identity consistency between the input human image and the generated video, especially when the person in the video exhibits significant expression changes and movements. This issue becomes critical when the human face occupies merely a small fraction of the image. Since humans are highly sensitive to identity variations, this poses a critical yet under-explored challenge in I2V generation. In this paper, we propose Identity-Preserving Reward-guided Optimization (IPRO), a novel video diffusion framework based on reinforcement learning to enhance identity preservation. Instead of introducing auxiliary modules or altering model architectures, our approach introduces a direct and effective tuning algorithm that optimizes diffusion models using a face identity scorer. To improve performance and accelerate convergence, our method backpropagates the reward signal through the last steps of the sampling chain, enabling richer gradient feedback. We also propose a novel facial scoring mechanism that treats faces in ground-truth videos as facial feature pools, providing multi-angle facial information to enhance generalization. A KL-divergence regularization is further incorporated to stabilize training and prevent overfitting to the reward signal. Extensive experiments on Wan 2.2 I2V model and our in-house I2V model demonstrate the effectiveness of our method. Our project and code are available at \href{https://ipro-alimama.github.io/}{https://ipro-alimama.github.io/}.
Dual-Camera All-in-Focus Neural Radiance Fields
Apr 23, 2025We present the first framework capable of synthesizing the all-in-focus neural radiance field (NeRF) from inputs without manual refocusing. Without refocusing, the camera will automatically focus on the fixed object for all views, and current NeRF methods typically using one camera fail due to the consistent defocus blur and a lack of sharp reference. To restore the all-in-focus NeRF, we introduce the dual-camera from smartphones, where the ultra-wide camera has a wider depth-of-field (DoF) and the main camera possesses a higher resolution. The dual camera pair saves the high-fidelity details from the main camera and uses the ultra-wide camera's deep DoF as reference for all-in-focus restoration. To this end, we first implement spatial warping and color matching to align the dual camera, followed by a defocus-aware fusion module with learnable defocus parameters to predict a defocus map and fuse the aligned camera pair. We also build a multi-view dataset that includes image pairs of the main and ultra-wide cameras in a smartphone. Extensive experiments on this dataset verify that our solution, termed DC-NeRF, can produce high-quality all-in-focus novel views and compares favorably against strong baselines quantitatively and qualitatively. We further show DoF applications of DC-NeRF with adjustable blur intensity and focal plane, including refocusing and split diopter.
TacoDepth: Towards Efficient Radar-Camera Depth Estimation with One-stage Fusion
Apr 16, 2025



Radar-Camera depth estimation aims to predict dense and accurate metric depth by fusing input images and Radar data. Model efficiency is crucial for this task in pursuit of real-time processing on autonomous vehicles and robotic platforms. However, due to the sparsity of Radar returns, the prevailing methods adopt multi-stage frameworks with intermediate quasi-dense depth, which are time-consuming and not robust. To address these challenges, we propose TacoDepth, an efficient and accurate Radar-Camera depth estimation model with one-stage fusion. Specifically, the graph-based Radar structure extractor and the pyramid-based Radar fusion module are designed to capture and integrate the graph structures of Radar point clouds, delivering superior model efficiency and robustness without relying on the intermediate depth results. Moreover, TacoDepth can be flexible for different inference modes, providing a better balance of speed and accuracy. Extensive experiments are conducted to demonstrate the efficacy of our method. Compared with the previous state-of-the-art approach, TacoDepth improves depth accuracy and processing speed by 12.8% and 91.8%. Our work provides a new perspective on efficient Radar-Camera depth estimation.
Free4D: Tuning-free 4D Scene Generation with Spatial-Temporal Consistency
Mar 26, 2025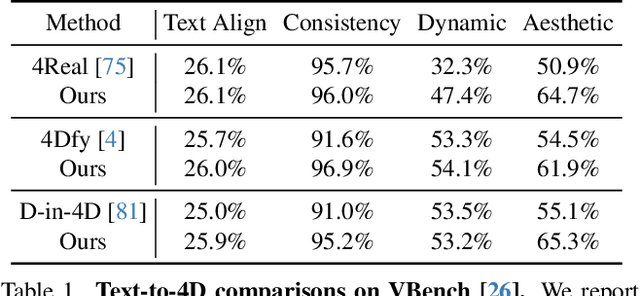
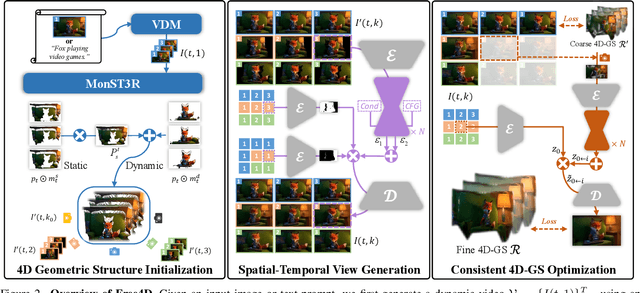
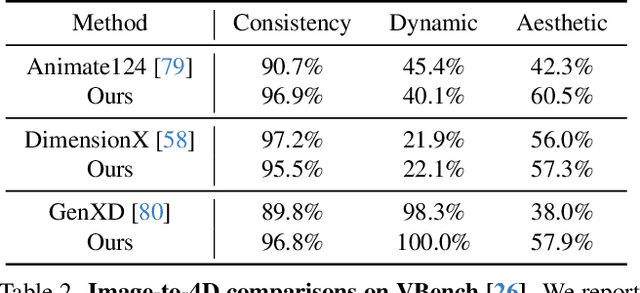
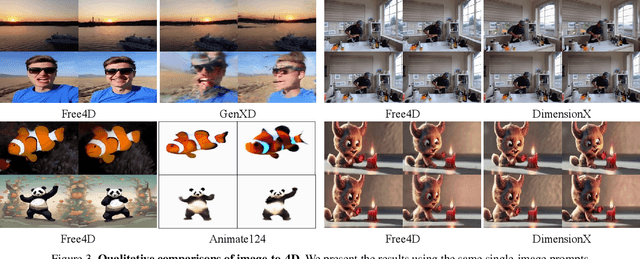
We present Free4D, a novel tuning-free framework for 4D scene generation from a single image. Existing methods either focus on object-level generation, making scene-level generation infeasible, or rely on large-scale multi-view video datasets for expensive training, with limited generalization ability due to the scarcity of 4D scene data. In contrast, our key insight is to distill pre-trained foundation models for consistent 4D scene representation, which offers promising advantages such as efficiency and generalizability. 1) To achieve this, we first animate the input image using image-to-video diffusion models followed by 4D geometric structure initialization. 2) To turn this coarse structure into spatial-temporal consistent multiview videos, we design an adaptive guidance mechanism with a point-guided denoising strategy for spatial consistency and a novel latent replacement strategy for temporal coherence. 3) To lift these generated observations into consistent 4D representation, we propose a modulation-based refinement to mitigate inconsistencies while fully leveraging the generated information. The resulting 4D representation enables real-time, controllable rendering, marking a significant advancement in single-image-based 4D scene generation.
Exploring Contextual Attribute Density in Referring Expression Counting
Mar 16, 2025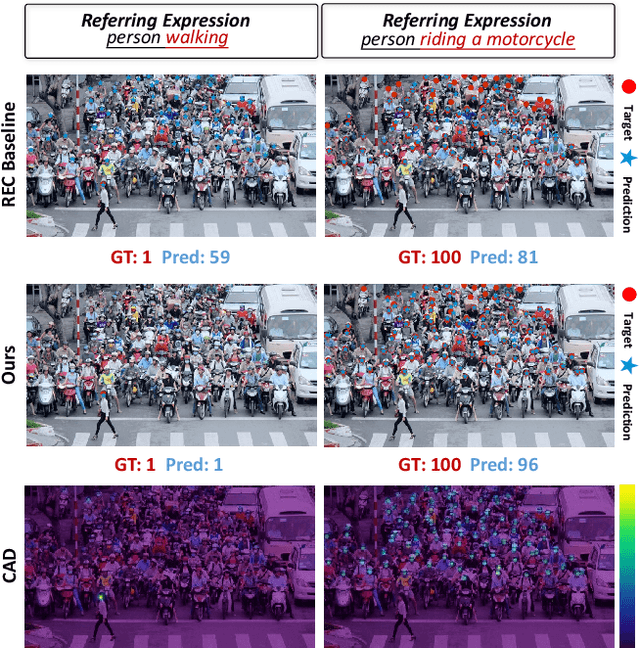
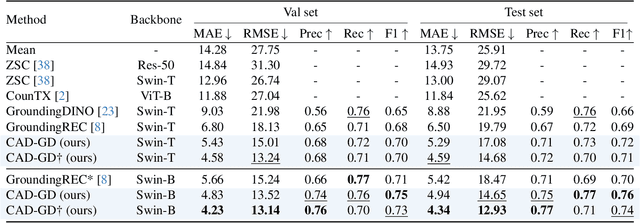
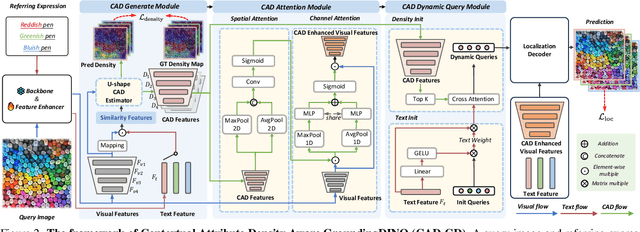
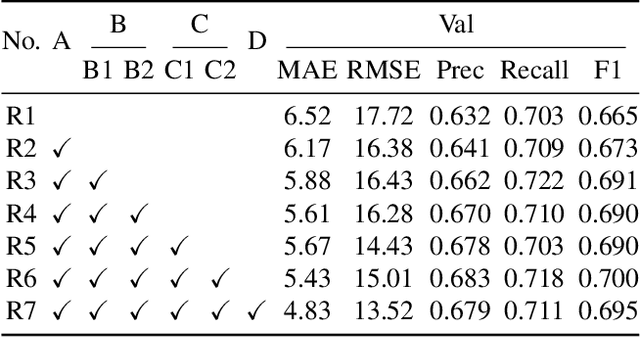
Referring expression counting (REC) algorithms are for more flexible and interactive counting ability across varied fine-grained text expressions. However, the requirement for fine-grained attribute understanding poses challenges for prior arts, as they struggle to accurately align attribute information with correct visual patterns. Given the proven importance of ''visual density'', it is presumed that the limitations of current REC approaches stem from an under-exploration of ''contextual attribute density'' (CAD). In the scope of REC, we define CAD as the measure of the information intensity of one certain fine-grained attribute in visual regions. To model the CAD, we propose a U-shape CAD estimator in which referring expression and multi-scale visual features from GroundingDINO can interact with each other. With additional density supervision, we can effectively encode CAD, which is subsequently decoded via a novel attention procedure with CAD-refined queries. Integrating all these contributions, our framework significantly outperforms state-of-the-art REC methods, achieves $30\%$ error reduction in counting metrics and a $10\%$ improvement in localization accuracy. The surprising results shed light on the significance of contextual attribute density for REC. Code will be at github.com/Xu3XiWang/CAD-GD.
Self-Distilled Depth Refinement with Noisy Poisson Fusion
Sep 26, 2024
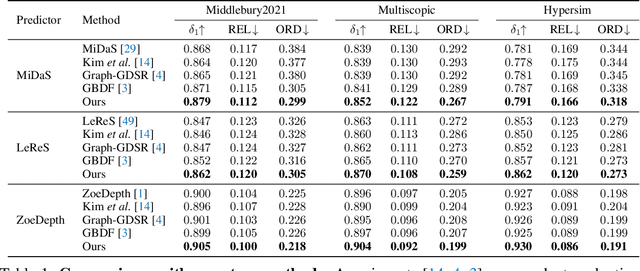

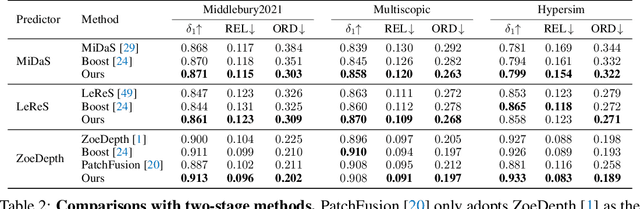
Depth refinement aims to infer high-resolution depth with fine-grained edges and details, refining low-resolution results of depth estimation models. The prevailing methods adopt tile-based manners by merging numerous patches, which lacks efficiency and produces inconsistency. Besides, prior arts suffer from fuzzy depth boundaries and limited generalizability. Analyzing the fundamental reasons for these limitations, we model depth refinement as a noisy Poisson fusion problem with local inconsistency and edge deformation noises. We propose the Self-distilled Depth Refinement (SDDR) framework to enforce robustness against the noises, which mainly consists of depth edge representation and edge-based guidance. With noisy depth predictions as input, SDDR generates low-noise depth edge representations as pseudo-labels by coarse-to-fine self-distillation. Edge-based guidance with edge-guided gradient loss and edge-based fusion loss serves as the optimization objective equivalent to Poisson fusion. When depth maps are better refined, the labels also become more noise-free. Our model can acquire strong robustness to the noises, achieving significant improvements in accuracy, edge quality, efficiency, and generalizability on five different benchmarks. Moreover, directly training another model with edge labels produced by SDDR brings improvements, suggesting that our method could help with training robust refinement models in future works.