 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBokehFlow: Depth-Free Controllable Bokeh Rendering via Flow Matching
Nov 19, 2025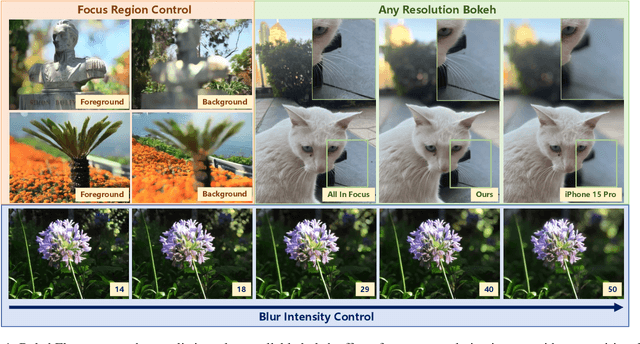
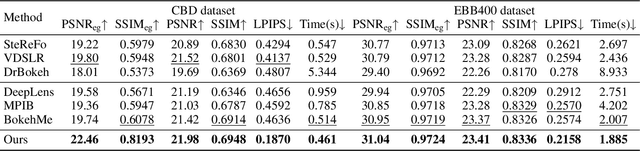
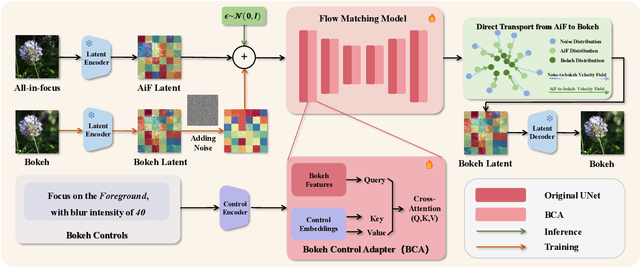
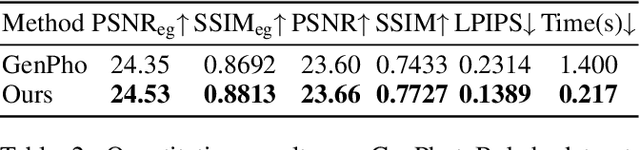
Bokeh rendering simulates the shallow depth-of-field effect in photography, enhancing visual aesthetics and guiding viewer attention to regions of interest. Although recent approaches perform well, rendering controllable bokeh without additional depth inputs remains a significant challenge. Existing classical and neural controllable methods rely on accurate depth maps, while generative approaches often struggle with limited controllability and efficiency. In this paper, we propose BokehFlow, a depth-free framework for controllable bokeh rendering based on flow matching. BokehFlow directly synthesizes photorealistic bokeh effects from all-in-focus images, eliminating the need for depth inputs. It employs a cross-attention mechanism to enable semantic control over both focus regions and blur intensity via text prompts. To support training and evaluation, we collect and synthesize four datasets. Extensive experiments demonstrate that BokehFlow achieves visually compelling bokeh effects and offers precise control, outperforming existing depth-dependent and generative methods in both rendering quality and efficiency.
Generative Photographic Control for Scene-Consistent Video Cinematic Editing
Nov 17, 2025Cinematic storytelling is profoundly shaped by the artful manipulation of photographic elements such as depth of field and exposure. These effects are crucial in conveying mood and creating aesthetic appeal. However, controlling these effects in generative video models remains highly challenging, as most existing methods are restricted to camera motion control. In this paper, we propose CineCtrl, the first video cinematic editing framework that provides fine control over professional camera parameters (e.g., bokeh, shutter speed). We introduce a decoupled cross-attention mechanism to disentangle camera motion from photographic inputs, allowing fine-grained, independent control without compromising scene consistency. To overcome the shortage of training data, we develop a comprehensive data generation strategy that leverages simulated photographic effects with a dedicated real-world collection pipeline, enabling the construction of a large-scale dataset for robust model training. Extensive experiments demonstrate that our model generates high-fidelity videos with precisely controlled, user-specified photographic camera effects.
Identity-Preserving Image-to-Video Generation via Reward-Guided Optimization
Oct 16, 2025Recent advances in image-to-video (I2V) generation have achieved remarkable progress in synthesizing high-quality, temporally coherent videos from static images. Among all the applications of I2V, human-centric video generation includes a large portion. However, existing I2V models encounter difficulties in maintaining identity consistency between the input human image and the generated video, especially when the person in the video exhibits significant expression changes and movements. This issue becomes critical when the human face occupies merely a small fraction of the image. Since humans are highly sensitive to identity variations, this poses a critical yet under-explored challenge in I2V generation. In this paper, we propose Identity-Preserving Reward-guided Optimization (IPRO), a novel video diffusion framework based on reinforcement learning to enhance identity preservation. Instead of introducing auxiliary modules or altering model architectures, our approach introduces a direct and effective tuning algorithm that optimizes diffusion models using a face identity scorer. To improve performance and accelerate convergence, our method backpropagates the reward signal through the last steps of the sampling chain, enabling richer gradient feedback. We also propose a novel facial scoring mechanism that treats faces in ground-truth videos as facial feature pools, providing multi-angle facial information to enhance generalization. A KL-divergence regularization is further incorporated to stabilize training and prevent overfitting to the reward signal. Extensive experiments on Wan 2.2 I2V model and our in-house I2V model demonstrate the effectiveness of our method. Our project and code are available at \href{https://ipro-alimama.github.io/}{https://ipro-alimama.github.io/}.
Free4D: Tuning-free 4D Scene Generation with Spatial-Temporal Consistency
Mar 26, 2025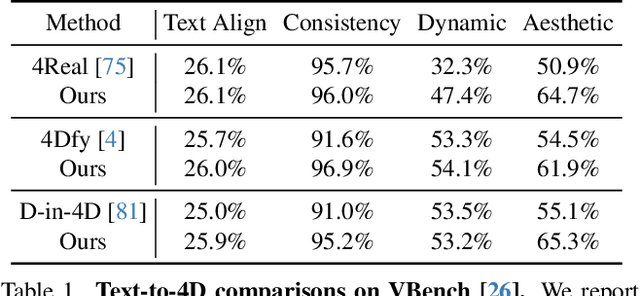
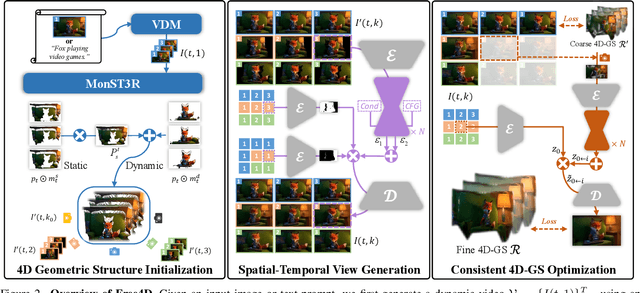
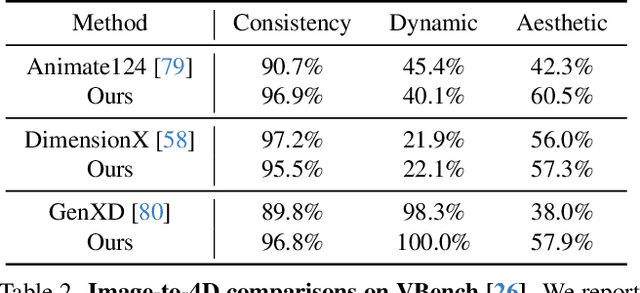
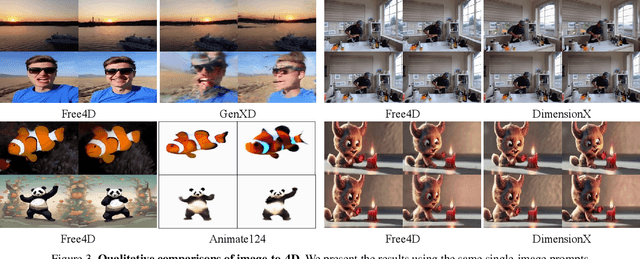
We present Free4D, a novel tuning-free framework for 4D scene generation from a single image. Existing methods either focus on object-level generation, making scene-level generation infeasible, or rely on large-scale multi-view video datasets for expensive training, with limited generalization ability due to the scarcity of 4D scene data. In contrast, our key insight is to distill pre-trained foundation models for consistent 4D scene representation, which offers promising advantages such as efficiency and generalizability. 1) To achieve this, we first animate the input image using image-to-video diffusion models followed by 4D geometric structure initialization. 2) To turn this coarse structure into spatial-temporal consistent multiview videos, we design an adaptive guidance mechanism with a point-guided denoising strategy for spatial consistency and a novel latent replacement strategy for temporal coherence. 3) To lift these generated observations into consistent 4D representation, we propose a modulation-based refinement to mitigate inconsistencies while fully leveraging the generated information. The resulting 4D representation enables real-time, controllable rendering, marking a significant advancement in single-image-based 4D scene generation.
DreamMover: Leveraging the Prior of Diffusion Models for Image Interpolation with Large Motion
Sep 15, 2024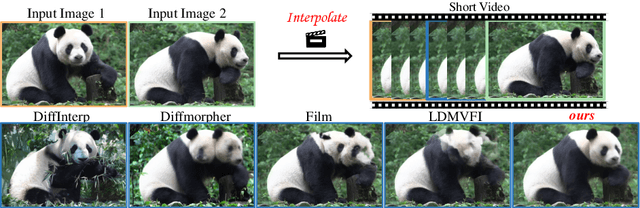
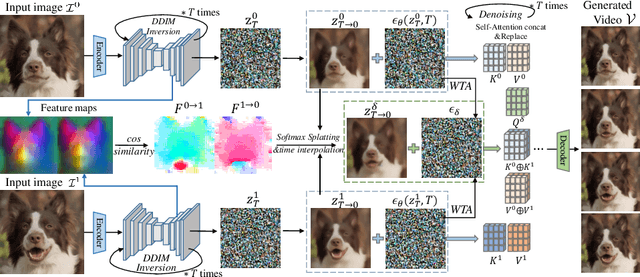
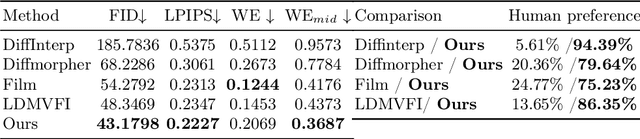
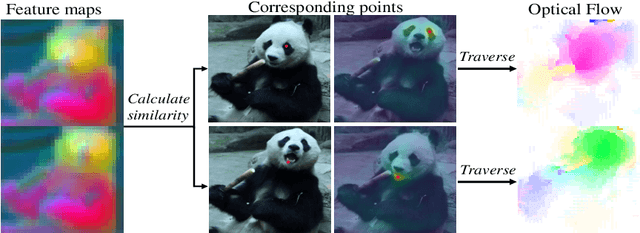
We study the problem of generating intermediate images from image pairs with large motion while maintaining semantic consistency. Due to the large motion, the intermediate semantic information may be absent in input images. Existing methods either limit to small motion or focus on topologically similar objects, leading to artifacts and inconsistency in the interpolation results. To overcome this challenge, we delve into pre-trained image diffusion models for their capabilities in semantic cognition and representations, ensuring consistent expression of the absent intermediate semantic representations with the input. To this end, we propose DreamMover, a novel image interpolation framework with three main components: 1) A natural flow estimator based on the diffusion model that can implicitly reason about the semantic correspondence between two images. 2) To avoid the loss of detailed information during fusion, our key insight is to fuse information in two parts, high-level space and low-level space. 3) To enhance the consistency between the generated images and input, we propose the self-attention concatenation and replacement approach. Lastly, we present a challenging benchmark dataset InterpBench to evaluate the semantic consistency of generated results. Extensive experiments demonstrate the effectiveness of our method. Our project is available at https://dreamm0ver.github.io .
Towards Robust Monocular Depth Estimation in Non-Lambertian Surfaces
Aug 12, 2024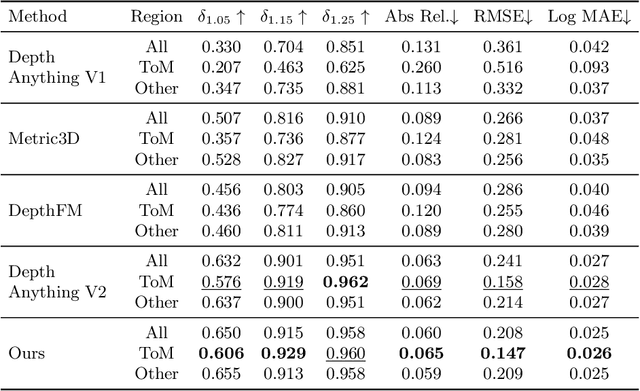
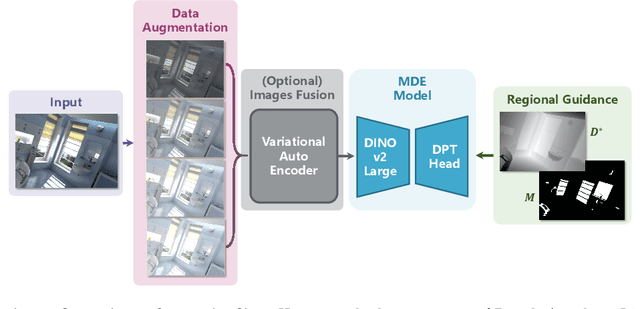
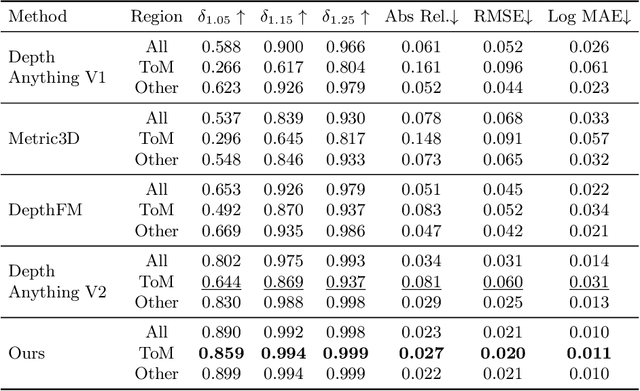
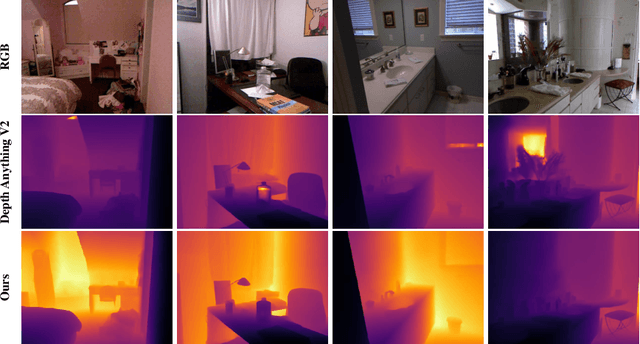
In the field of monocular depth estimation (MDE), many models with excellent zero-shot performance in general scenes emerge recently. However, these methods often fail in predicting non-Lambertian surfaces, such as transparent or mirror (ToM) surfaces, due to the unique reflective properties of these regions. Previous methods utilize externally provided ToM masks and aim to obtain correct depth maps through direct in-painting of RGB images. These methods highly depend on the accuracy of additional input masks, and the use of random colors during in-painting makes them insufficiently robust. We are committed to incrementally enabling the baseline model to directly learn the uniqueness of non-Lambertian surface regions for depth estimation through a well-designed training framework. Therefore, we propose non-Lambertian surface regional guidance, which constrains the predictions of MDE model from the gradient domain to enhance its robustness. Noting the significant impact of lighting on this task, we employ the random tone-mapping augmentation during training to ensure the network can predict correct results for varying lighting inputs. Additionally, we propose an optional novel lighting fusion module, which uses Variational Autoencoders to fuse multiple images and obtain the most advantageous input RGB image for depth estimation when multi-exposure images are available. Our method achieves accuracy improvements of 33.39% and 5.21% in zero-shot testing on the Booster and Mirror3D dataset for non-Lambertian surfaces, respectively, compared to the Depth Anything V2. The state-of-the-art performance of 90.75 in delta1.05 within the ToM regions on the TRICKY2024 competition test set demonstrates the effectiveness of our approach.
Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo
May 20, 2024



We present MVSGaussian, a new generalizable 3D Gaussian representation approach derived from Multi-View Stereo (MVS) that can efficiently reconstruct unseen scenes. Specifically, 1) we leverage MVS to encode geometry-aware Gaussian representations and decode them into Gaussian parameters. 2) To further enhance performance, we propose a hybrid Gaussian rendering that integrates an efficient volume rendering design for novel view synthesis. 3) To support fast fine-tuning for specific scenes, we introduce a multi-view geometric consistent aggregation strategy to effectively aggregate the point clouds generated by the generalizable model, serving as the initialization for per-scene optimization. Compared with previous generalizable NeRF-based methods, which typically require minutes of fine-tuning and seconds of rendering per image, MVSGaussian achieves real-time rendering with better synthesis quality for each scene. Compared with the vanilla 3D-GS, MVSGaussian achieves better view synthesis with less training computational cost. Extensive experiments on DTU, Real Forward-facing, NeRF Synthetic, and Tanks and Temples datasets validate that MVSGaussian attains state-of-the-art performance with convincing generalizability, real-time rendering speed, and fast per-scene optimization.
DyBluRF: Dynamic Neural Radiance Fields from Blurry Monocular Video
Mar 19, 2024Recent advancements in dynamic neural radiance field methods have yielded remarkable outcomes. However, these approaches rely on the assumption of sharp input images. When faced with motion blur, existing dynamic NeRF methods often struggle to generate high-quality novel views. In this paper, we propose DyBluRF, a dynamic radiance field approach that synthesizes sharp novel views from a monocular video affected by motion blur. To account for motion blur in input images, we simultaneously capture the camera trajectory and object Discrete Cosine Transform (DCT) trajectories within the scene. Additionally, we employ a global cross-time rendering approach to ensure consistent temporal coherence across the entire scene. We curate a dataset comprising diverse dynamic scenes that are specifically tailored for our task. Experimental results on our dataset demonstrate that our method outperforms existing approaches in generating sharp novel views from motion-blurred inputs while maintaining spatial-temporal consistency of the scene.
Make-It-4D: Synthesizing a Consistent Long-Term Dynamic Scene Video from a Single Image
Aug 20, 2023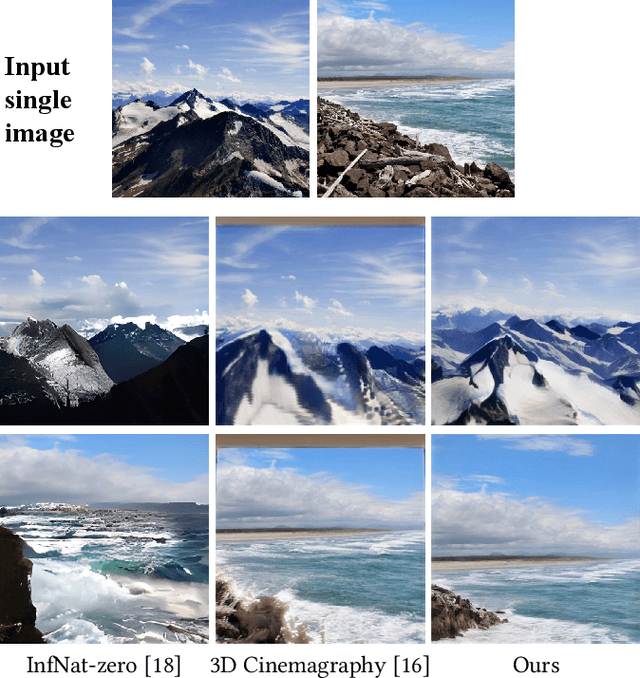
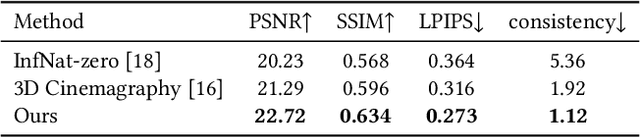
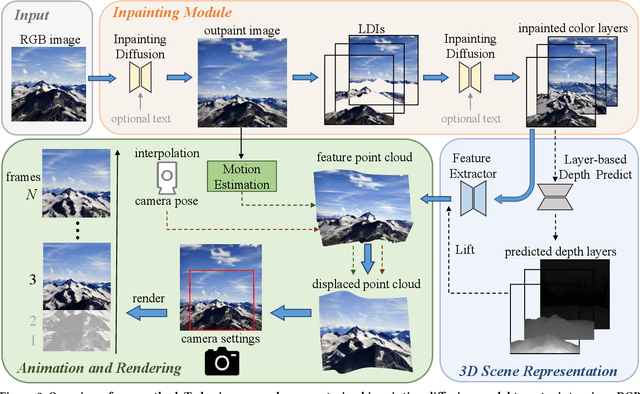
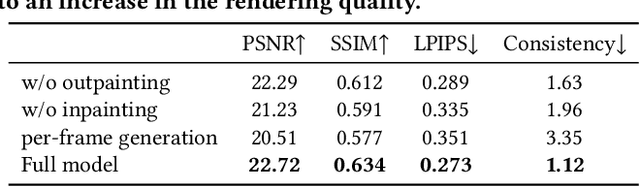
We study the problem of synthesizing a long-term dynamic video from only a single image. This is challenging since it requires consistent visual content movements given large camera motions. Existing methods either hallucinate inconsistent perpetual views or struggle with long camera trajectories. To address these issues, it is essential to estimate the underlying 4D (including 3D geometry and scene motion) and fill in the occluded regions. To this end, we present Make-It-4D, a novel method that can generate a consistent long-term dynamic video from a single image. On the one hand, we utilize layered depth images (LDIs) to represent a scene, and they are then unprojected to form a feature point cloud. To animate the visual content, the feature point cloud is displaced based on the scene flow derived from motion estimation and the corresponding camera pose. Such 4D representation enables our method to maintain the global consistency of the generated dynamic video. On the other hand, we fill in the occluded regions by using a pretrained diffusion model to inpaint and outpaint the input image. This enables our method to work under large camera motions. Benefiting from our design, our method can be training-free which saves a significant amount of training time. Experimental results demonstrate the effectiveness of our approach, which showcases compelling rendering results.