 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBokehFlow: Depth-Free Controllable Bokeh Rendering via Flow Matching
Nov 19, 2025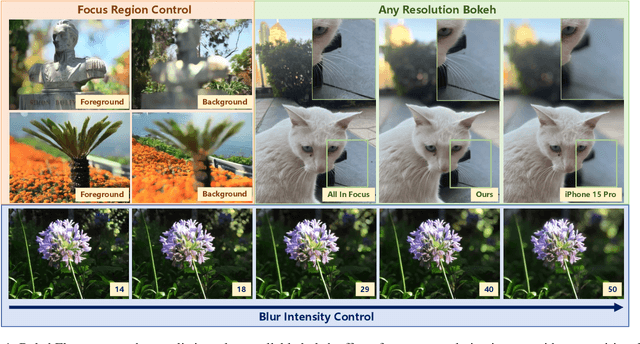
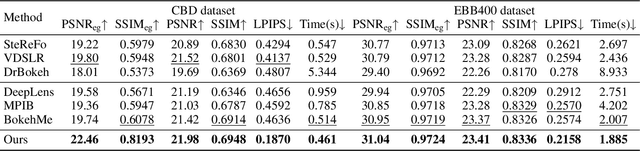
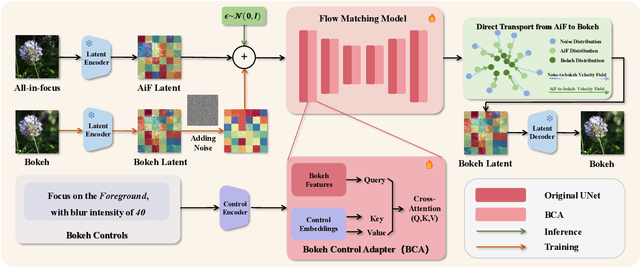
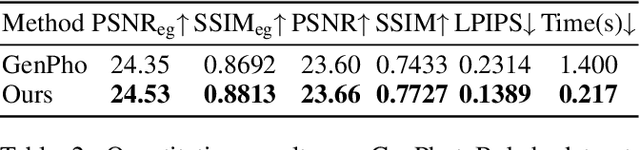
Bokeh rendering simulates the shallow depth-of-field effect in photography, enhancing visual aesthetics and guiding viewer attention to regions of interest. Although recent approaches perform well, rendering controllable bokeh without additional depth inputs remains a significant challenge. Existing classical and neural controllable methods rely on accurate depth maps, while generative approaches often struggle with limited controllability and efficiency. In this paper, we propose BokehFlow, a depth-free framework for controllable bokeh rendering based on flow matching. BokehFlow directly synthesizes photorealistic bokeh effects from all-in-focus images, eliminating the need for depth inputs. It employs a cross-attention mechanism to enable semantic control over both focus regions and blur intensity via text prompts. To support training and evaluation, we collect and synthesize four datasets. Extensive experiments demonstrate that BokehFlow achieves visually compelling bokeh effects and offers precise control, outperforming existing depth-dependent and generative methods in both rendering quality and efficiency.
Dual-Camera All-in-Focus Neural Radiance Fields
Apr 23, 2025We present the first framework capable of synthesizing the all-in-focus neural radiance field (NeRF) from inputs without manual refocusing. Without refocusing, the camera will automatically focus on the fixed object for all views, and current NeRF methods typically using one camera fail due to the consistent defocus blur and a lack of sharp reference. To restore the all-in-focus NeRF, we introduce the dual-camera from smartphones, where the ultra-wide camera has a wider depth-of-field (DoF) and the main camera possesses a higher resolution. The dual camera pair saves the high-fidelity details from the main camera and uses the ultra-wide camera's deep DoF as reference for all-in-focus restoration. To this end, we first implement spatial warping and color matching to align the dual camera, followed by a defocus-aware fusion module with learnable defocus parameters to predict a defocus map and fuse the aligned camera pair. We also build a multi-view dataset that includes image pairs of the main and ultra-wide cameras in a smartphone. Extensive experiments on this dataset verify that our solution, termed DC-NeRF, can produce high-quality all-in-focus novel views and compares favorably against strong baselines quantitatively and qualitatively. We further show DoF applications of DC-NeRF with adjustable blur intensity and focal plane, including refocusing and split diopter.
Dynamic Neural Radiance Field From Defocused Monocular Video
Jul 08, 2024Dynamic Neural Radiance Field (NeRF) from monocular videos has recently been explored for space-time novel view synthesis and achieved excellent results. However, defocus blur caused by depth variation often occurs in video capture, compromising the quality of dynamic reconstruction because the lack of sharp details interferes with modeling temporal consistency between input views. To tackle this issue, we propose D2RF, the first dynamic NeRF method designed to restore sharp novel views from defocused monocular videos. We introduce layered Depth-of-Field (DoF) volume rendering to model the defocus blur and reconstruct a sharp NeRF supervised by defocused views. The blur model is inspired by the connection between DoF rendering and volume rendering. The opacity in volume rendering aligns with the layer visibility in DoF rendering.To execute the blurring, we modify the layered blur kernel to the ray-based kernel and employ an optimized sparse kernel to gather the input rays efficiently and render the optimized rays with our layered DoF volume rendering. We synthesize a dataset with defocused dynamic scenes for our task, and extensive experiments on our dataset show that our method outperforms existing approaches in synthesizing all-in-focus novel views from defocus blur while maintaining spatial-temporal consistency in the scene.
Fast Full-frame Video Stabilization with Iterative Optimization
Jul 31, 2023



Video stabilization refers to the problem of transforming a shaky video into a visually pleasing one. The question of how to strike a good trade-off between visual quality and computational speed has remained one of the open challenges in video stabilization. Inspired by the analogy between wobbly frames and jigsaw puzzles, we propose an iterative optimization-based learning approach using synthetic datasets for video stabilization, which consists of two interacting submodules: motion trajectory smoothing and full-frame outpainting. First, we develop a two-level (coarse-to-fine) stabilizing algorithm based on the probabilistic flow field. The confidence map associated with the estimated optical flow is exploited to guide the search for shared regions through backpropagation. Second, we take a divide-and-conquer approach and propose a novel multiframe fusion strategy to render full-frame stabilized views. An important new insight brought about by our iterative optimization approach is that the target video can be interpreted as the fixed point of nonlinear mapping for video stabilization. We formulate video stabilization as a problem of minimizing the amount of jerkiness in motion trajectories, which guarantees convergence with the help of fixed-point theory. Extensive experimental results are reported to demonstrate the superiority of the proposed approach in terms of computational speed and visual quality. The code will be available on GitHub.
Defocus to focus: Photo-realistic bokeh rendering by fusing defocus and radiance priors
Jun 07, 2023



We consider the problem of realistic bokeh rendering from a single all-in-focus image. Bokeh rendering mimics aesthetic shallow depth-of-field (DoF) in professional photography, but these visual effects generated by existing methods suffer from simple flat background blur and blurred in-focus regions, giving rise to unrealistic rendered results. In this work, we argue that realistic bokeh rendering should (i) model depth relations and distinguish in-focus regions, (ii) sustain sharp in-focus regions, and (iii) render physically accurate Circle of Confusion (CoC). To this end, we present a Defocus to Focus (D2F) framework to learn realistic bokeh rendering by fusing defocus priors with the all-in-focus image and by implementing radiance priors in layered fusion. Since no depth map is provided, we introduce defocus hallucination to integrate depth by learning to focus. The predicted defocus map implies the blur amount of bokeh and is used to guide weighted layered rendering. In layered rendering, we fuse images blurred by different kernels based on the defocus map. To increase the reality of the bokeh, we adopt radiance virtualization to simulate scene radiance. The scene radiance used in weighted layered rendering reassigns weights in the soft disk kernel to produce the CoC. To ensure the sharpness of in-focus regions, we propose to fuse upsampled bokeh images and original images. We predict the initial fusion mask from our defocus map and refine the mask with a deep network. We evaluate our model on a large-scale bokeh dataset. Extensive experiments show that our approach is capable of rendering visually pleasing bokeh effects in complex scenes. In particular, our solution receives the runner-up award in the AIM 2020 Rendering Realistic Bokeh Challenge.
* Published at Information Fusion 2023 https://www.sciencedirect.com/science/article/pii/S1566253522001221
Point-and-Shoot All-in-Focus Photo Synthesis from Smartphone Camera Pair
Apr 11, 2023



All-in-Focus (AIF) photography is expected to be a commercial selling point for modern smartphones. Standard AIF synthesis requires manual, time-consuming operations such as focal stack compositing, which is unfriendly to ordinary people. To achieve point-and-shoot AIF photography with a smartphone, we expect that an AIF photo can be generated from one shot of the scene, instead of from multiple photos captured by the same camera. Benefiting from the multi-camera module in modern smartphones, we introduce a new task of AIF synthesis from main (wide) and ultra-wide cameras. The goal is to recover sharp details from defocused regions in the main-camera photo with the help of the ultra-wide-camera one. The camera setting poses new challenges such as parallax-induced occlusions and inconsistent color between cameras. To overcome the challenges, we introduce a predict-and-refine network to mitigate occlusions and propose dynamic frequency-domain alignment for color correction. To enable effective training and evaluation, we also build an AIF dataset with 2686 unique scenes. Each scene includes two photos captured by the main camera, one photo captured by the ultrawide camera, and a synthesized AIF photo. Results show that our solution, termed EasyAIF, can produce high-quality AIF photos and outperforms strong baselines quantitatively and qualitatively. For the first time, we demonstrate point-and-shoot AIF photo synthesis successfully from main and ultra-wide cameras.
MPIB: An MPI-Based Bokeh Rendering Framework for Realistic Partial Occlusion Effects
Jul 18, 2022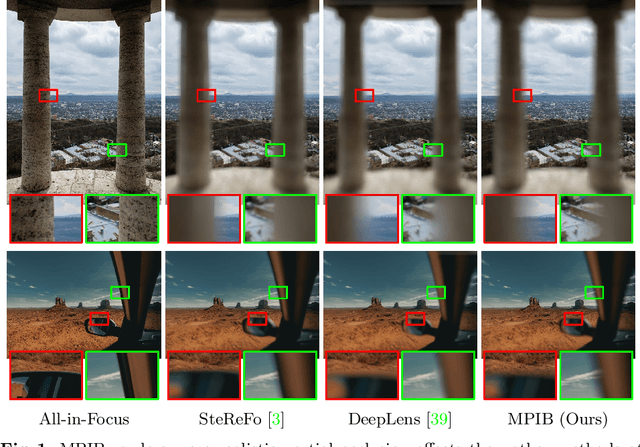
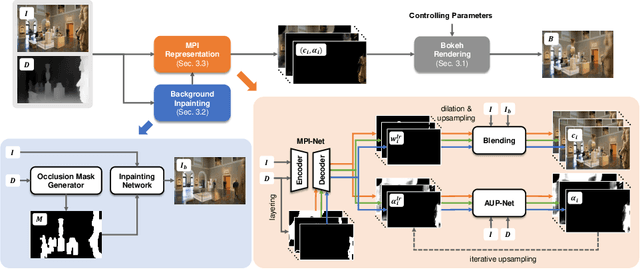
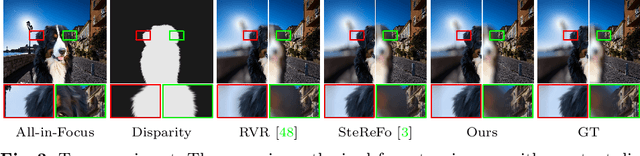
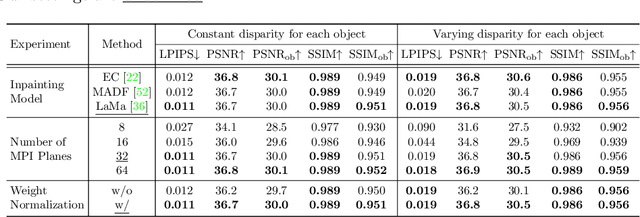
Partial occlusion effects are a phenomenon that blurry objects near a camera are semi-transparent, resulting in partial appearance of occluded background. However, it is challenging for existing bokeh rendering methods to simulate realistic partial occlusion effects due to the missing information of the occluded area in an all-in-focus image. Inspired by the learnable 3D scene representation, Multiplane Image (MPI), we attempt to address the partial occlusion by introducing a novel MPI-based high-resolution bokeh rendering framework, termed MPIB. To this end, we first present an analysis on how to apply the MPI representation to bokeh rendering. Based on this analysis, we propose an MPI representation module combined with a background inpainting module to implement high-resolution scene representation. This representation can then be reused to render various bokeh effects according to the controlling parameters. To train and test our model, we also design a ray-tracing-based bokeh generator for data generation. Extensive experiments on synthesized and real-world images validate the effectiveness and flexibility of this framework.
BokehMe: When Neural Rendering Meets Classical Rendering
Jun 25, 2022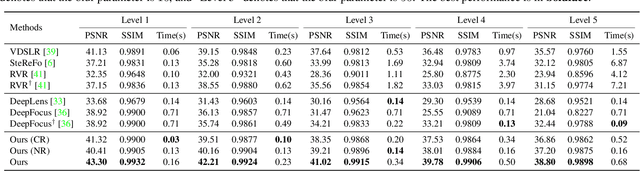
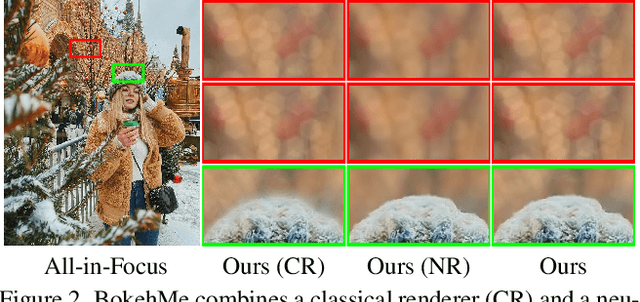
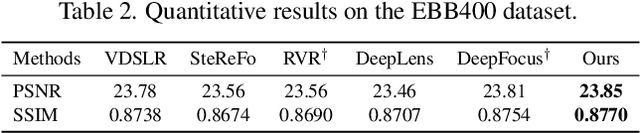
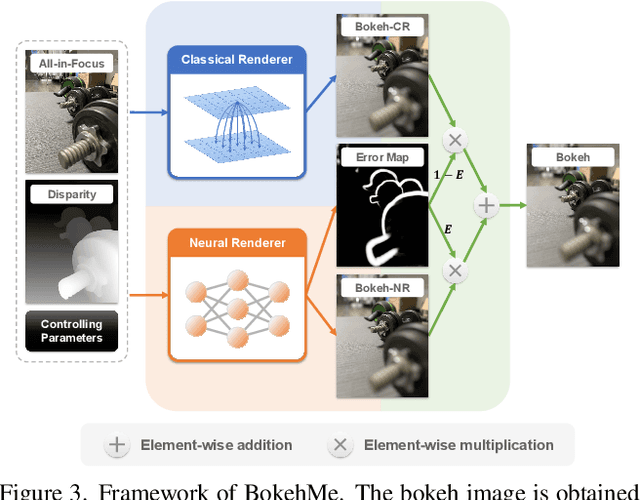
We propose BokehMe, a hybrid bokeh rendering framework that marries a neural renderer with a classical physically motivated renderer. Given a single image and a potentially imperfect disparity map, BokehMe generates high-resolution photo-realistic bokeh effects with adjustable blur size, focal plane, and aperture shape. To this end, we analyze the errors from the classical scattering-based method and derive a formulation to calculate an error map. Based on this formulation, we implement the classical renderer by a scattering-based method and propose a two-stage neural renderer to fix the erroneous areas from the classical renderer. The neural renderer employs a dynamic multi-scale scheme to efficiently handle arbitrary blur sizes, and it is trained to handle imperfect disparity input. Experiments show that our method compares favorably against previous methods on both synthetic image data and real image data with predicted disparity. A user study is further conducted to validate the advantage of our method.
AIM 2020 Challenge on Rendering Realistic Bokeh
Nov 10, 2020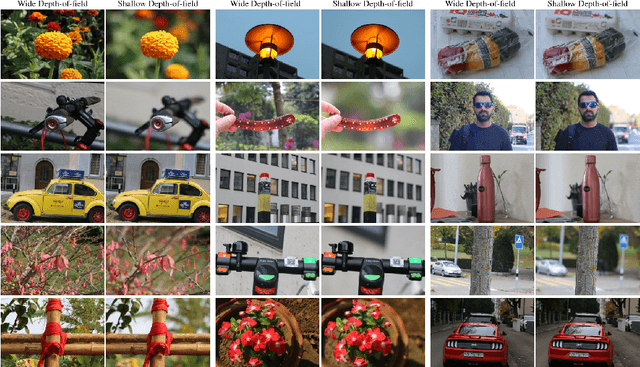
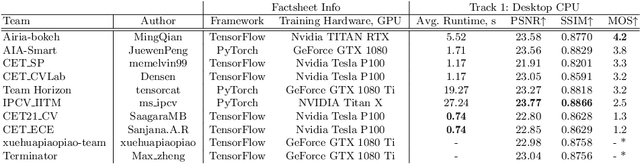

This paper reviews the second AIM realistic bokeh effect rendering challenge and provides the description of the proposed solutions and results. The participating teams were solving a real-world bokeh simulation problem, where the goal was to learn a realistic shallow focus technique using a large-scale EBB! bokeh dataset consisting of 5K shallow / wide depth-of-field image pairs captured using the Canon 7D DSLR camera. The participants had to render bokeh effect based on only one single frame without any additional data from other cameras or sensors. The target metric used in this challenge combined the runtime and the perceptual quality of the solutions measured in the user study. To ensure the efficiency of the submitted models, we measured their runtime on standard desktop CPUs as well as were running the models on smartphone GPUs. The proposed solutions significantly improved the baseline results, defining the state-of-the-art for practical bokeh effect rendering problem.