 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoLID-11K: A Dashcam Dataset for Small-Object Roadside Litter Detection
Jan 01, 2026Roadside litter poses environmental, safety and economic challenges, yet current monitoring relies on labour-intensive surveys and public reporting, providing limited spatial coverage. Existing vision datasets for litter detection focus on street-level still images, aerial scenes or aquatic environments, and do not reflect the unique characteristics of dashcam footage, where litter appears extremely small, sparse and embedded in cluttered road-verge backgrounds. We introduce RoLID-11K, the first large-scale dataset for roadside litter detection from dashcams, comprising over 11k annotated images spanning diverse UK driving conditions and exhibiting pronounced long-tail and small-object distributions. We benchmark a broad spectrum of modern detectors, from accuracy-oriented transformer architectures to real-time YOLO models, and analyse their strengths and limitations on this challenging task. Our results show that while CO-DETR and related transformers achieve the best localisation accuracy, real-time models remain constrained by coarse feature hierarchies. RoLID-11K establishes a challenging benchmark for extreme small-object detection in dynamic driving scenes and aims to support the development of scalable, low-cost systems for roadside-litter monitoring. The dataset is available at https://github.com/xq141839/RoLID-11K.
FreqDINO: Frequency-Guided Adaptation for Generalized Boundary-Aware Ultrasound Image Segmentation
Dec 12, 2025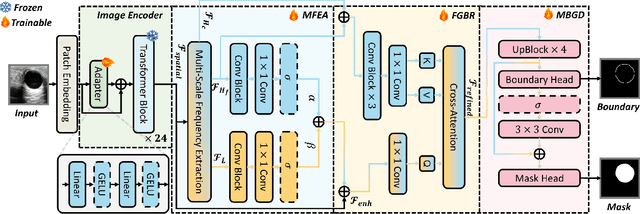
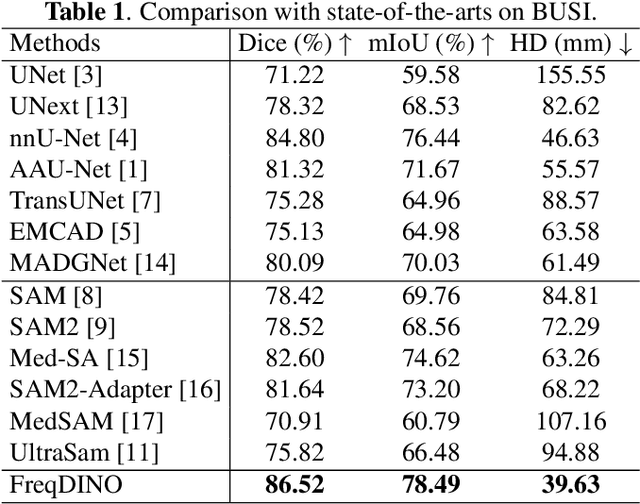
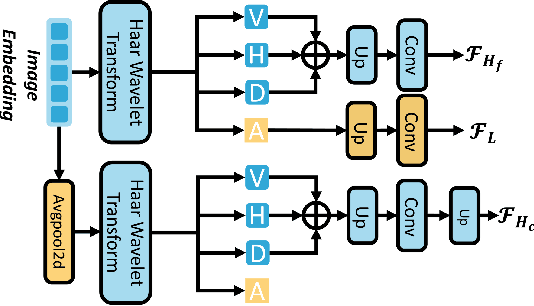
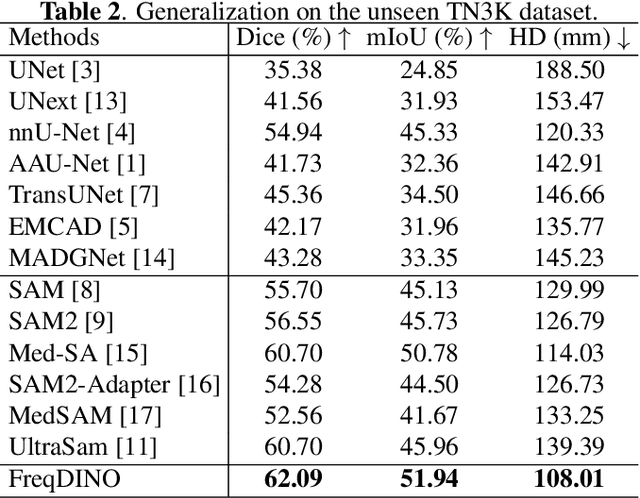
Ultrasound image segmentation is pivotal for clinical diagnosis, yet challenged by speckle noise and imaging artifacts. Recently, DINOv3 has shown remarkable promise in medical image segmentation with its powerful representation capabilities. However, DINOv3, pre-trained on natural images, lacks sensitivity to ultrasound-specific boundary degradation. To address this limitation, we propose FreqDINO, a frequency-guided segmentation framework that enhances boundary perception and structural consistency. Specifically, we devise a Multi-scale Frequency Extraction and Alignment (MFEA) strategy to separate low-frequency structures and multi-scale high-frequency boundary details, and align them via learnable attention. We also introduce a Frequency-Guided Boundary Refinement (FGBR) module that extracts boundary prototypes from high-frequency components and refines spatial features. Furthermore, we design a Multi-task Boundary-Guided Decoder (MBGD) to ensure spatial coherence between boundary and semantic predictions. Extensive experiments demonstrate that FreqDINO surpasses state-of-the-art methods with superior achieves remarkable generalization capability. The code is at https://github.com/MingLang-FD/FreqDINO.
TM-UNet: Token-Memory Enhanced Sequential Modeling for Efficient Medical Image Segmentation
Nov 15, 2025Medical image segmentation is essential for clinical diagnosis and treatment planning. Although transformer-based methods have achieved remarkable results, their high computational cost hinders clinical deployment. To address this issue, we propose TM-UNet, a novel lightweight framework that integrates token sequence modeling with an efficient memory mechanism for efficient medical segmentation. Specifically, we introduce a multi-scale token-memory (MSTM) block that transforms 2D spatial features into token sequences through strategic spatial scanning, leveraging matrix memory cells to selectively retain and propagate discriminative contextual information across tokens. This novel token-memory mechanism acts as a dynamic knowledge store that captures long-range dependencies with linear complexity, enabling efficient global reasoning without redundant computation. Our MSTM block further incorporates exponential gating to identify token effectiveness and multi-scale contextual extraction via parallel pooling operations, enabling hierarchical representation learning without computational overhead. Extensive experiments demonstrate that TM-UNet outperforms state-of-the-art methods across diverse medical segmentation tasks with substantially reduced computation cost. The code is available at https://github.com/xq141839/TM-UNet.
CoMA: Complementary Masking and Hierarchical Dynamic Multi-Window Self-Attention in a Unified Pre-training Framework
Nov 08, 2025Masked Autoencoders (MAE) achieve self-supervised learning of image representations by randomly removing a portion of visual tokens and reconstructing the original image as a pretext task, thereby significantly enhancing pretraining efficiency and yielding excellent adaptability across downstream tasks. However, MAE and other MAE-style paradigms that adopt random masking generally require more pre-training epochs to maintain adaptability. Meanwhile, ViT in MAE suffers from inefficient parameter use due to fixed spatial resolution across layers. To overcome these limitations, we propose the Complementary Masked Autoencoders (CoMA), which employ a complementary masking strategy to ensure uniform sampling across all pixels, thereby improving effective learning of all features and enhancing the model's adaptability. Furthermore, we introduce DyViT, a hierarchical vision transformer that employs a Dynamic Multi-Window Self-Attention (DM-MSA), significantly reducing the parameters and FLOPs while improving fine-grained feature learning. Pre-trained on ImageNet-1K with CoMA, DyViT matches the downstream performance of MAE using only 12% of the pre-training epochs, demonstrating more effective learning. It also attains a 10% reduction in pre-training time per epoch, further underscoring its superior pre-training efficiency.
HRMedSeg: Unlocking High-resolution Medical Image segmentation via Memory-efficient Attention Modeling
Apr 08, 2025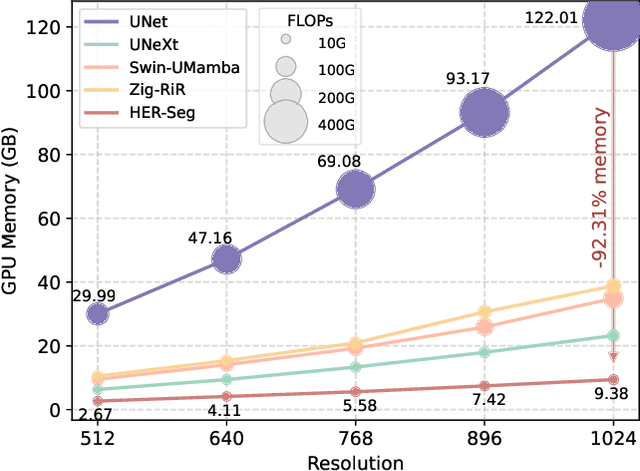
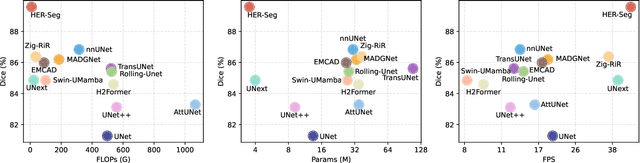
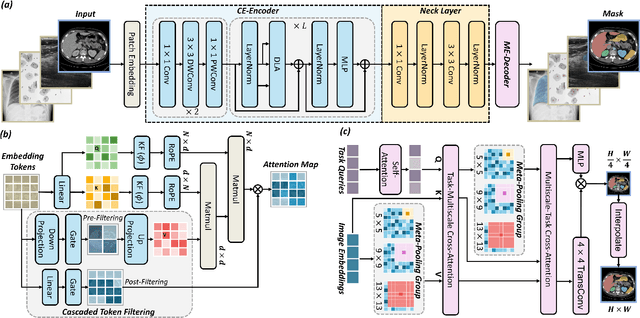
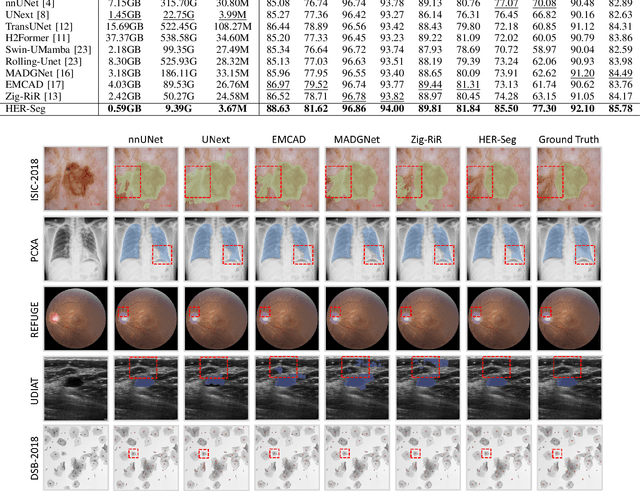
High-resolution segmentation is critical for precise disease diagnosis by extracting micro-imaging information from medical images. Existing transformer-based encoder-decoder frameworks have demonstrated remarkable versatility and zero-shot performance in medical segmentation. While beneficial, they usually require huge memory costs when handling large-size segmentation mask predictions, which are expensive to apply to real-world scenarios. To address this limitation, we propose a memory-efficient framework for high-resolution medical image segmentation, called HRMedSeg. Specifically, we first devise a lightweight gated vision transformer (LGViT) as our image encoder to model long-range dependencies with linear complexity. Then, we design an efficient cross-multiscale decoder (ECM-Decoder) to generate high-resolution segmentation masks. Moreover, we utilize feature distillation during pretraining to unleash the potential of our proposed model. Extensive experiments reveal that HRMedSeg outperforms state-of-the-arts in diverse high-resolution medical image segmentation tasks. In particular, HRMedSeg uses only 0.59GB GPU memory per batch during fine-tuning, demonstrating low training costs. Besides, when HRMedSeg meets the Segment Anything Model (SAM), our HRMedSegSAM takes 0.61% parameters of SAM-H. The code is available at https://github.com/xq141839/HRMedSeg.
CFFormer: Cross CNN-Transformer Channel Attention and Spatial Feature Fusion for Improved Segmentation of Low Quality Medical Images
Jan 07, 2025Hybrid CNN-Transformer models are designed to combine the advantages of Convolutional Neural Networks (CNNs) and Transformers to efficiently model both local information and long-range dependencies. However, most research tends to focus on integrating the spatial features of CNNs and Transformers, while overlooking the critical importance of channel features. This is particularly significant for model performance in low-quality medical image segmentation. Effective channel feature extraction can significantly enhance the model's ability to capture contextual information and improve its representation capabilities. To address this issue, we propose a hybrid CNN-Transformer model, CFFormer, and introduce two modules: the Cross Feature Channel Attention (CFCA) module and the X-Spatial Feature Fusion (XFF) module. The model incorporates dual encoders, with the CNN encoder focusing on capturing local features and the Transformer encoder modeling global features. The CFCA module filters and facilitates interactions between the channel features from the two encoders, while the XFF module effectively reduces the significant semantic information differences in spatial features, enabling a smooth and cohesive spatial feature fusion. We evaluate our model across eight datasets covering five modalities to test its generalization capability. Experimental results demonstrate that our model outperforms current state-of-the-art (SOTA) methods, with particularly superior performance on datasets characterized by blurry boundaries and low contrast.
WSI-LLaVA: A Multimodal Large Language Model for Whole Slide Image
Dec 03, 2024



Recent advancements in computational pathology have produced patch-level Multi-modal Large Language Models (MLLMs), but these models are limited by their inability to analyze whole slide images (WSIs) comprehensively and their tendency to bypass crucial morphological features that pathologists rely on for diagnosis. To address these challenges, we first introduce WSI-Bench, a large-scale morphology-aware benchmark containing 180k VQA pairs from 9,850 WSIs across 30 cancer types, designed to evaluate MLLMs' understanding of morphological characteristics crucial for accurate diagnosis. Building upon this benchmark, we present WSI-LLaVA, a novel framework for gigapixel WSI understanding that employs a three-stage training approach: WSI-text alignment, feature space alignment, and task-specific instruction tuning. To better assess model performance in pathological contexts, we develop two specialized WSI metrics: WSI-Precision and WSI-Relevance. Experimental results demonstrate that WSI-LLaVA outperforms existing models across all capability dimensions, with a significant improvement in morphological analysis, establishing a clear correlation between morphological understanding and diagnostic accuracy.
TAVP: Task-Adaptive Visual Prompt for Cross-domain Few-shot Segmentation
Sep 09, 2024



Under the backdrop of large-scale pre-training, large visual models (LVM) have demonstrated significant potential in image understanding. The recent emergence of the Segment Anything Model (SAM) has brought a qualitative shift in the field of image segmentation, supporting flexible interactive cues and strong learning capabilities. However, its performance often falls short in cross-domain and few-shot applications. Transferring prior knowledge from foundation models to new applications while preserving learning capabilities is worth exploring. This work proposes a task-adaptive prompt framework based on SAM, a new paradigm for Cross-dominan few-shot segmentation (CD-FSS). First, a Multi-level Feature Fusion (MFF) was used for integrated feature extraction. Besides, an additional Class Domain Task-Adaptive Auto-Prompt (CDTAP) module was combined with the segmentation branch for class-domain agnostic feature extraction and high-quality learnable prompt production. This significant advancement uses a unique generative approach to prompts alongside a comprehensive model structure and specialized prototype computation. While ensuring that the prior knowledge of SAM is not discarded, the new branch disentangles category and domain information through prototypes, guiding it in adapting the CD-FSS. We have achieved the best results on three benchmarks compared to the recent state-of-the-art (SOTA) methods. Comprehensive experiments showed that after task-specific and weighted guidance, the abundant feature information of SAM can be better learned for CD-FSS.
NuSegDG: Integration of Heterogeneous Space and Gaussian Kernel for Domain-Generalized Nuclei Segmentation
Aug 21, 2024



Domain-generalized nuclei segmentation refers to the generalizability of models to unseen domains based on knowledge learned from source domains and is challenged by various image conditions, cell types, and stain strategies. Recently, the Segment Anything Model (SAM) has made great success in universal image segmentation by interactive prompt modes (e.g., point and box). Despite its strengths, the original SAM presents limited adaptation to medical images. Moreover, SAM requires providing manual bounding box prompts for each object to produce satisfactory segmentation masks, so it is laborious in nuclei segmentation scenarios. To address these limitations, we propose a domain-generalizable framework for nuclei image segmentation, abbreviated to NuSegDG. Specifically, we first devise a Heterogeneous Space Adapter (HS-Adapter) to learn multi-dimensional feature representations of different nuclei domains by injecting a small number of trainable parameters into the image encoder of SAM. To alleviate the labor-intensive requirement of manual prompts, we introduce a Gaussian-Kernel Prompt Encoder (GKP-Encoder) to generate density maps driven by a single point, which guides segmentation predictions by mixing position prompts and semantic prompts. Furthermore, we present a Two-Stage Mask Decoder (TSM-Decoder) to effectively convert semantic masks to instance maps without the manual demand for morphological shape refinement. Based on our experimental evaluations, the proposed NuSegDG demonstrates state-of-the-art performance in nuclei instance segmentation, exhibiting superior domain generalization capabilities. The source code is available at https://github.com/xq141839/NuSegDG.
ESP-MedSAM: Efficient Self-Prompting SAM for Universal Domain-Generalized Medical Image Segmentation
Jul 19, 2024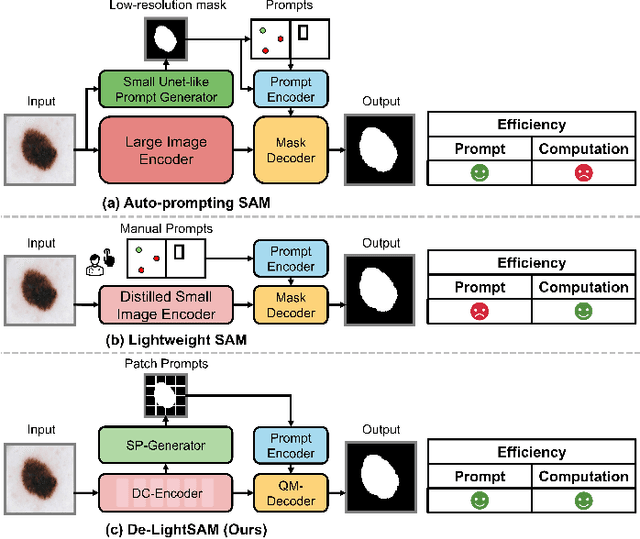
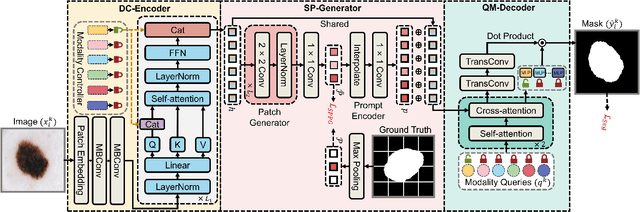
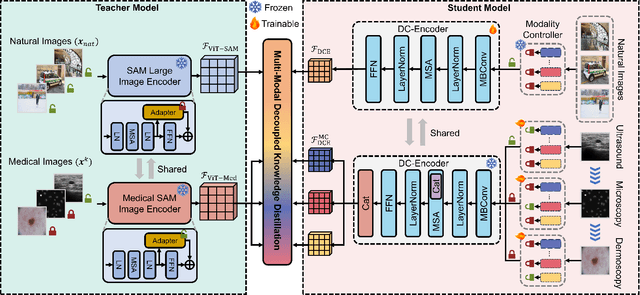
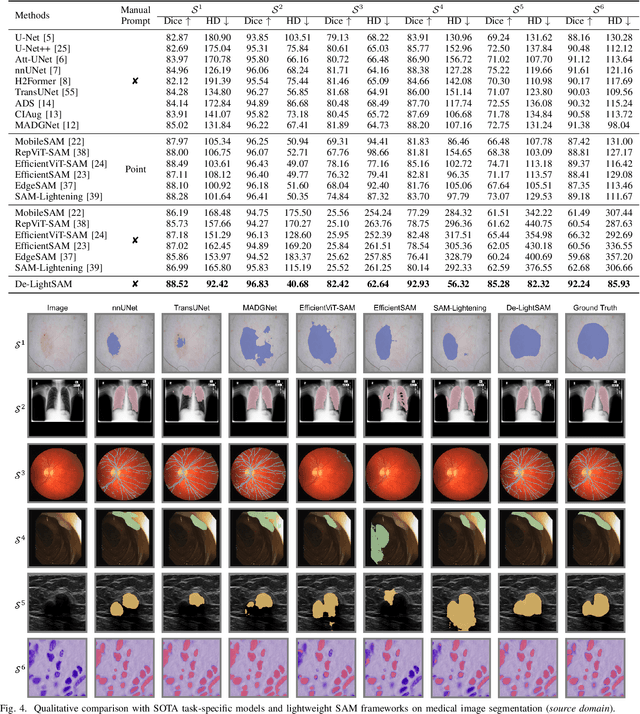
The Segment Anything Model (SAM) has demonstrated outstanding adaptation to medical image segmentation but still faces three major challenges. Firstly, the huge computational costs of SAM limit its real-world applicability. Secondly, SAM depends on manual annotations (e.g., points, boxes) as prompts, which are laborious and impractical in clinical scenarios. Thirdly, SAM handles all segmentation targets equally, which is suboptimal for diverse medical modalities with inherent heterogeneity. To address these issues, we propose an Efficient Self-Prompting SAM for universal medical image segmentation, named ESP-MedSAM. We devise a Multi-Modal Decoupled Knowledge Distillation (MMDKD) strategy to distil common image knowledge and domain-specific medical knowledge from the foundation model to train a lightweight image encoder and a modality controller. Further, they combine with the additionally introduced Self-Patch Prompt Generator (SPPG) and Query-Decoupled Modality Decoder (QDMD) to construct ESP-MedSAM. Specifically, SPPG aims to generate a set of patch prompts automatically and QDMD leverages a one-to-one strategy to provide an independent decoding channel for every modality. Extensive experiments indicate that ESP-MedSAM outperforms state-of-the-arts in diverse medical imaging segmentation takes, displaying superior zero-shot learning and modality transfer ability. Especially, our framework uses only 31.4% parameters compared to SAM-Base.