 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntern-S1-Pro: Scientific Multimodal Foundation Model at Trillion Scale
Mar 26, 2026We introduce Intern-S1-Pro, the first one-trillion-parameter scientific multimodal foundation model. Scaling to this unprecedented size, the model delivers a comprehensive enhancement across both general and scientific domains. Beyond stronger reasoning and image-text understanding capabilities, its intelligence is augmented with advanced agent capabilities. Simultaneously, its scientific expertise has been vastly expanded to master over 100 specialized tasks across critical science fields, including chemistry, materials, life sciences, and earth sciences. Achieving this massive scale is made possible by the robust infrastructure support of XTuner and LMDeploy, which facilitates highly efficient Reinforcement Learning (RL) training at the 1-trillion parameter level while ensuring strict precision consistency between training and inference. By seamlessly integrating these advancements, Intern-S1-Pro further fortifies the fusion of general and specialized intelligence, working as a Specializable Generalist, demonstrating its position in the top tier of open-source models for general capabilities, while outperforming proprietary models in the depth of specialized scientific tasks.
The RoboSense Challenge: Sense Anything, Navigate Anywhere, Adapt Across Platforms
Jan 08, 2026Autonomous systems are increasingly deployed in open and dynamic environments -- from city streets to aerial and indoor spaces -- where perception models must remain reliable under sensor noise, environmental variation, and platform shifts. However, even state-of-the-art methods often degrade under unseen conditions, highlighting the need for robust and generalizable robot sensing. The RoboSense 2025 Challenge is designed to advance robustness and adaptability in robot perception across diverse sensing scenarios. It unifies five complementary research tracks spanning language-grounded decision making, socially compliant navigation, sensor configuration generalization, cross-view and cross-modal correspondence, and cross-platform 3D perception. Together, these tasks form a comprehensive benchmark for evaluating real-world sensing reliability under domain shifts, sensor failures, and platform discrepancies. RoboSense 2025 provides standardized datasets, baseline models, and unified evaluation protocols, enabling large-scale and reproducible comparison of robust perception methods. The challenge attracted 143 teams from 85 institutions across 16 countries, reflecting broad community engagement. By consolidating insights from 23 winning solutions, this report highlights emerging methodological trends, shared design principles, and open challenges across all tracks, marking a step toward building robots that can sense reliably, act robustly, and adapt across platforms in real-world environments.
Long-horizon Reasoning Agent for Olympiad-Level Mathematical Problem Solving
Dec 12, 2025Large Reasoning Models (LRMs) have expanded the mathematical reasoning frontier through Chain-of-Thought (CoT) techniques and Reinforcement Learning with Verifiable Rewards (RLVR), capable of solving AIME-level problems. However, the performance of LRMs is heavily dependent on the extended reasoning context length. For solving ultra-hard problems like those in the International Mathematical Olympiad (IMO), the required reasoning complexity surpasses the space that an LRM can explore in a single round. Previous works attempt to extend the reasoning context of LRMs but remain prompt-based and built upon proprietary models, lacking systematic structures and training pipelines. Therefore, this paper introduces Intern-S1-MO, a long-horizon math agent that conducts multi-round hierarchical reasoning, composed of an LRM-based multi-agent system including reasoning, summary, and verification. By maintaining a compact memory in the form of lemmas, Intern-S1-MO can more freely explore the lemma-rich reasoning spaces in multiple reasoning stages, thereby breaking through the context constraints for IMO-level math problems. Furthermore, we propose OREAL-H, an RL framework for training the LRM using the online explored trajectories to simultaneously bootstrap the reasoning ability of LRM and elevate the overall performance of Intern-S1-MO. Experiments show that Intern-S1-MO can obtain 26 out of 35 points on the non-geometry problems of IMO2025, matching the performance of silver medalists. It also surpasses the current advanced LRMs on inference benchmarks such as HMMT2025, AIME2025, and CNMO2025. In addition, our agent officially participates in CMO2025 and achieves a score of 102/126 under the judgment of human experts, reaching the gold medal level.
Achieving Olympia-Level Geometry Large Language Model Agent via Complexity Boosting Reinforcement Learning
Dec 12, 2025Large language model (LLM) agents exhibit strong mathematical problem-solving abilities and can even solve International Mathematical Olympiad (IMO) level problems with the assistance of formal proof systems. However, due to weak heuristics for auxiliary constructions, AI for geometry problem solving remains dominated by expert models such as AlphaGeometry 2, which rely heavily on large-scale data synthesis and search for both training and evaluation. In this work, we make the first attempt to build a medalist-level LLM agent for geometry and present InternGeometry. InternGeometry overcomes the heuristic limitations in geometry by iteratively proposing propositions and auxiliary constructions, verifying them with a symbolic engine, and reflecting on the engine's feedback to guide subsequent proposals. A dynamic memory mechanism enables InternGeometry to conduct more than two hundred interactions with the symbolic engine per problem. To further accelerate learning, we introduce Complexity-Boosting Reinforcement Learning (CBRL), which gradually increases the complexity of synthesized problems across training stages. Built on InternThinker-32B, InternGeometry solves 44 of 50 IMO geometry problems (2000-2024), exceeding the average gold medalist score (40.9), using only 13K training examples, just 0.004% of the data used by AlphaGeometry 2, demonstrating the potential of LLM agents on expert-level geometry tasks. InternGeometry can also propose novel auxiliary constructions for IMO problems that do not appear in human solutions. We will release the model, data, and symbolic engine to support future research.
OPV: Outcome-based Process Verifier for Efficient Long Chain-of-Thought Verification
Dec 11, 2025Large language models (LLMs) have achieved significant progress in solving complex reasoning tasks by Reinforcement Learning with Verifiable Rewards (RLVR). This advancement is also inseparable from the oversight automated by reliable verifiers. However, current outcome-based verifiers (OVs) are unable to inspect the unreliable intermediate steps in the long reasoning chains of thought (CoTs). Meanwhile, current process-based verifiers (PVs) have difficulties in reliably detecting errors in the complex long CoTs, limited by the scarcity of high-quality annotations due to the prohibitive costs of human annotations. Therefore, we propose the Outcome-based Process Verifier (OPV), which verifies the rationale process of summarized outcomes from long CoTs to achieve both accurate and efficient verification and enable large-scale annotation. To empower the proposed verifier, we adopt an iterative active learning framework with expert annotations to progressively improve the verification capability of OPV with fewer annotation costs. Specifically, in each iteration, the most uncertain cases of the current best OPV are annotated and then subsequently used to train a new OPV through Rejection Fine-Tuning (RFT) and RLVR for the next round. Extensive experiments demonstrate OPV's superior performance and broad applicability. It achieves new state-of-the-art results on our held-out OPV-Bench, outperforming much larger open-source models such as Qwen3-Max-Preview with an F1 score of 83.1 compared to 76.3. Furthermore, OPV effectively detects false positives within synthetic dataset, closely align with expert assessment. When collaborating with policy models, OPV consistently yields performance gains, e.g., raising the accuracy of DeepSeek-R1-Distill-Qwen-32B from 55.2% to 73.3% on AIME2025 as the compute budget scales.
TiS-TSL: Image-Label Supervised Surgical Video Stereo Matching via Time-Switchable Teacher-Student Learning
Nov 12, 2025Stereo matching in minimally invasive surgery (MIS) is essential for next-generation navigation and augmented reality. Yet, dense disparity supervision is nearly impossible due to anatomical constraints, typically limiting annotations to only a few image-level labels acquired before the endoscope enters deep body cavities. Teacher-Student Learning (TSL) offers a promising solution by leveraging a teacher trained on sparse labels to generate pseudo labels and associated confidence maps from abundant unlabeled surgical videos. However, existing TSL methods are confined to image-level supervision, providing only spatial confidence and lacking temporal consistency estimation. This absence of spatio-temporal reliability results in unstable disparity predictions and severe flickering artifacts across video frames. To overcome these challenges, we propose TiS-TSL, a novel time-switchable teacher-student learning framework for video stereo matching under minimal supervision. At its core is a unified model that operates in three distinct modes: Image-Prediction (IP), Forward Video-Prediction (FVP), and Backward Video-Prediction (BVP), enabling flexible temporal modeling within a single architecture. Enabled by this unified model, TiS-TSL adopts a two-stage learning strategy. The Image-to-Video (I2V) stage transfers sparse image-level knowledge to initialize temporal modeling. The subsequent Video-to-Video (V2V) stage refines temporal disparity predictions by comparing forward and backward predictions to calculate bidirectional spatio-temporal consistency. This consistency identifies unreliable regions across frames, filters noisy video-level pseudo labels, and enforces temporal coherence. Experimental results on two public datasets demonstrate that TiS-TSL exceeds other image-based state-of-the-arts by improving TEPE and EPE by at least 2.11% and 4.54%, respectively.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025



We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
InternBootcamp Technical Report: Boosting LLM Reasoning with Verifiable Task Scaling
Aug 12, 2025



Large language models (LLMs) have revolutionized artificial intelligence by enabling complex reasoning capabilities. While recent advancements in reinforcement learning (RL) have primarily focused on domain-specific reasoning tasks (e.g., mathematics or code generation), real-world reasoning scenarios often require models to handle diverse and complex environments that narrow-domain benchmarks cannot fully capture. To address this gap, we present InternBootcamp, an open-source framework comprising 1000+ domain-diverse task environments specifically designed for LLM reasoning research. Our codebase offers two key functionalities: (1) automated generation of unlimited training/testing cases with configurable difficulty levels, and (2) integrated verification modules for objective response evaluation. These features make InternBootcamp fundamental infrastructure for RL-based model optimization, synthetic data generation, and model evaluation. Although manually developing such a framework with enormous task coverage is extremely cumbersome, we accelerate the development procedure through an automated agent workflow supplemented by manual validation protocols, which enables the task scope to expand rapidly. % With these bootcamps, we further establish Bootcamp-EVAL, an automatically generated benchmark for comprehensive performance assessment. Evaluation reveals that frontier models still underperform in many reasoning tasks, while training with InternBootcamp provides an effective way to significantly improve performance, leading to our 32B model that achieves state-of-the-art results on Bootcamp-EVAL and excels on other established benchmarks. In particular, we validate that consistent performance gains come from including more training tasks, namely \textbf{task scaling}, over two orders of magnitude, offering a promising route towards capable reasoning generalist.
Semi-off-Policy Reinforcement Learning for Vision-Language Slow-thinking Reasoning
Jul 22, 2025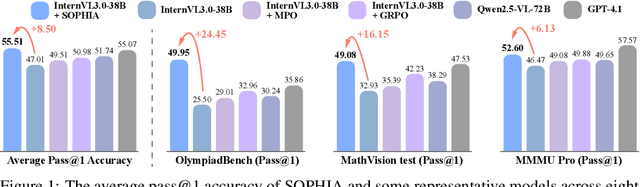
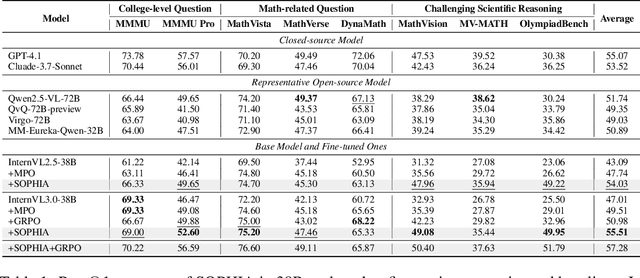
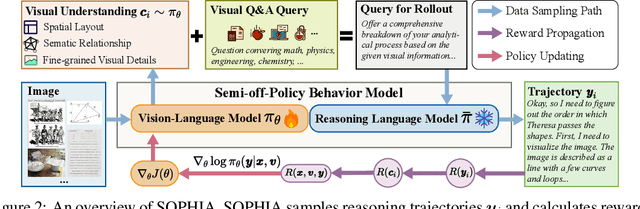
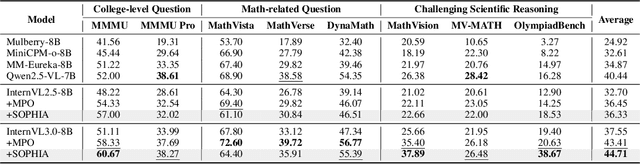
Enhancing large vision-language models (LVLMs) with visual slow-thinking reasoning is crucial for solving complex multimodal tasks. However, since LVLMs are mainly trained with vision-language alignment, it is difficult to adopt on-policy reinforcement learning (RL) to develop the slow thinking ability because the rollout space is restricted by its initial abilities. Off-policy RL offers a way to go beyond the current policy, but directly distilling trajectories from external models may cause visual hallucinations due to mismatched visual perception abilities across models. To address these issues, this paper proposes SOPHIA, a simple and scalable Semi-Off-Policy RL for vision-language slow-tHInking reAsoning. SOPHIA builds a semi-off-policy behavior model by combining on-policy visual understanding from a trainable LVLM with off-policy slow-thinking reasoning from a language model, assigns outcome-based rewards to reasoning, and propagates visual rewards backward. Then LVLM learns slow-thinking reasoning ability from the obtained reasoning trajectories using propagated rewards via off-policy RL algorithms. Extensive experiments with InternVL2.5 and InternVL3.0 with 8B and 38B sizes show the effectiveness of SOPHIA. Notably, SOPHIA improves InternVL3.0-38B by 8.50% in average, reaching state-of-the-art performance among open-source LVLMs on multiple multimodal reasoning benchmarks, and even outperforms some closed-source models (e.g., GPT-4.1) on the challenging MathVision and OlympiadBench, achieving 49.08% and 49.95% pass@1 accuracy, respectively. Analysis shows SOPHIA outperforms supervised fine-tuning and direct on-policy RL methods, offering a better policy initialization for further on-policy training.
The Imitation Game: Turing Machine Imitator is Length Generalizable Reasoner
Jul 17, 2025Length generalization, the ability to solve problems of longer sequences than those observed during training, poses a core challenge of Transformer-based large language models (LLM). Although existing studies have predominantly focused on data-driven approaches for arithmetic operations and symbolic manipulation tasks, these approaches tend to be task-specific with limited overall performance. To pursue a more general solution, this paper focuses on a broader case of reasoning problems that are computable, i.e., problems that algorithms can solve, thus can be solved by the Turing Machine. From this perspective, this paper proposes Turing MAchine Imitation Learning (TAIL) to improve the length generalization ability of LLMs. TAIL synthesizes chain-of-thoughts (CoT) data that imitate the execution process of a Turing Machine by computer programs, which linearly expands the reasoning steps into atomic states to alleviate shortcut learning and explicit memory fetch mechanism to reduce the difficulties of dynamic and long-range data access in elementary operations. To validate the reliability and universality of TAIL, we construct a challenging synthetic dataset covering 8 classes of algorithms and 18 tasks. Without bells and whistles, TAIL significantly improves the length generalization ability as well as the performance of Qwen2.5-7B on various tasks using only synthetic data, surpassing previous methods and DeepSeek-R1. The experimental results reveal that the key concepts in the Turing Machine, instead of the thinking styles, are indispensable for TAIL for length generalization, through which the model exhibits read-and-write behaviors consistent with the properties of the Turing Machine in their attention layers. This work provides a promising direction for future research in the learning of LLM reasoning from synthetic data.