 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpotlight: Synergizing Seed Exploration and Spot GPUs for DiT RL Post-Training
Jun 17, 2026Reinforcement learning (RL) post-training of Diffusion Transformers (DiTs) is prohibitively expensive, requiring thousands of high-end GPUs. Existing works explore two directions to reduce cost: seed exploration improves training convergence by selecting high-contrast samples, yet adds compute to the critical path; spot GPUs offer 69--77\% lower cost, yet sit idle during training because DiT rollouts finish nearly simultaneously, which prevents LLM-style pipelining of rollout with training. Spot preemptions further break Sequence Parallelism (SP) groups, fragmenting GPU topology. We present Spotlight, the first system that harvests spot GPUs for DiT RL post-training. Spotlight rests on two key insights we devise: (1)~we show that exploration can tolerate stale model weights because exploration that uses the model weights from the previous iteration preserves the relative ranking of random seeds, allowing exploration to run on idle spot GPUs during training. (2)~SP reconfiguration can reuse on-node state, reducing group recovery from minutes to sub-second launches. Built on these insights, Spotlight introduces three techniques: a bandit-based exploration planner that maximizes reward variance within the training time budget, elastic sequence parallelism that reconfigures SP groups on the fly via persistent schedulers and intra-node weight copying, and a preemption-aware pull-based request scheduler that balances load and commits in-flight state upon preemption. We implement Spotlight on the open-source RL platform ROLL and evaluate it on Qwen-Image post-training. Spotlight reaches the same target validation score $4\times$ faster than baselines, reducing total cost by $1.4$-$6.4\times$ while achieving superior image quality on DeepSeek-OCR and Geneval datasets with resolution $512\times512$ and $1280\times1280$.
Complementary Reinforcement Learning
Mar 18, 2026Reinforcement Learning (RL) has emerged as a powerful paradigm for training LLM-based agents, yet remains limited by low sample efficiency, stemming not only from sparse outcome feedback but also from the agent's inability to leverage prior experience across episodes. While augmenting agents with historical experience offers a promising remedy, existing approaches suffer from a critical weakness: the experience distilled from history is either stored statically or fail to coevolve with the improving actor, causing a progressive misalignment between the experience and the actor's evolving capability that diminishes its utility over the course of training. Inspired by complementary learning systems in neuroscience, we present Complementary RL to achieve seamless co-evolution of an experience extractor and a policy actor within the RL optimization loop. Specifically, the actor is optimized via sparse outcome-based rewards, while the experience extractor is optimized according to whether its distilled experiences demonstrably contribute to the actor's success, thereby evolving its experience management strategy in lockstep with the actor's growing capabilities. Empirically, Complementary RL outperforms outcome-based agentic RL baselines that do not learn from experience, achieving 10% performance improvement in single-task scenarios and exhibits robust scalability in multi-task settings. These results establish Complementary RL as a paradigm for efficient experience-driven agent learning.
AMAP Agentic Planning Technical Report
Dec 31, 2025We present STAgent, an agentic large language model tailored for spatio-temporal understanding, designed to solve complex tasks such as constrained point-of-interest discovery and itinerary planning. STAgent is a specialized model capable of interacting with ten distinct tools within spatio-temporal scenarios, enabling it to explore, verify, and refine intermediate steps during complex reasoning. Notably, STAgent effectively preserves its general capabilities. We empower STAgent with these capabilities through three key contributions: (1) a stable tool environment that supports over ten domain-specific tools, enabling asynchronous rollout and training; (2) a hierarchical data curation framework that identifies high-quality data like a needle in a haystack, curating high-quality queries with a filter ratio of 1:10,000, emphasizing both diversity and difficulty; and (3) a cascaded training recipe that starts with a seed SFT stage acting as a guardian to measure query difficulty, followed by a second SFT stage fine-tuned on queries with high certainty, and an ultimate RL stage that leverages data of low certainty. Initialized with Qwen3-30B-A3B to establish a strong SFT foundation and leverage insights into sample difficulty, STAgent yields promising performance on TravelBench while maintaining its general capabilities across a wide range of general benchmarks, thereby demonstrating the effectiveness of our proposed agentic model.
Let It Flow: Agentic Crafting on Rock and Roll, Building the ROME Model within an Open Agentic Learning Ecosystem
Dec 31, 2025Agentic crafting requires LLMs to operate in real-world environments over multiple turns by taking actions, observing outcomes, and iteratively refining artifacts. Despite its importance, the open-source community lacks a principled, end-to-end ecosystem to streamline agent development. We introduce the Agentic Learning Ecosystem (ALE), a foundational infrastructure that optimizes the production pipeline for agent LLMs. ALE consists of three components: ROLL, a post-training framework for weight optimization; ROCK, a sandbox environment manager for trajectory generation; and iFlow CLI, an agent framework for efficient context engineering. We release ROME (ROME is Obviously an Agentic Model), an open-source agent grounded by ALE and trained on over one million trajectories. Our approach includes data composition protocols for synthesizing complex behaviors and a novel policy optimization algorithm, Interaction-based Policy Alignment (IPA), which assigns credit over semantic interaction chunks rather than individual tokens to improve long-horizon training stability. Empirically, we evaluate ROME within a structured setting and introduce Terminal Bench Pro, a benchmark with improved scale and contamination control. ROME demonstrates strong performance across benchmarks like SWE-bench Verified and Terminal Bench, proving the effectiveness of the ALE infrastructure.
RollArt: Scaling Agentic RL Training via Disaggregated Infrastructure
Dec 27, 2025Agentic Reinforcement Learning (RL) enables Large Language Models (LLMs) to perform autonomous decision-making and long-term planning. Unlike standard LLM post-training, agentic RL workloads are highly heterogeneous, combining compute-intensive prefill phases, bandwidth-bound decoding, and stateful, CPU-heavy environment simulations. We argue that efficient agentic RL training requires disaggregated infrastructure to leverage specialized, best-fit hardware. However, naive disaggregation introduces substantial synchronization overhead and resource underutilization due to the complex dependencies between stages. We present RollArc, a distributed system designed to maximize throughput for multi-task agentic RL on disaggregated infrastructure. RollArc is built on three core principles: (1) hardware-affinity workload mapping, which routes compute-bound and bandwidth-bound tasks to bestfit GPU devices, (2) fine-grained asynchrony, which manages execution at the trajectory level to mitigate resource bubbles, and (3) statefulness-aware computation, which offloads stateless components (e.g., reward models) to serverless infrastructure for elastic scaling. Our results demonstrate that RollArc effectively improves training throughput and achieves 1.35-2.05\(\times\) end-to-end training time reduction compared to monolithic and synchronous baselines. We also evaluate RollArc by training a hundreds-of-billions-parameter MoE model for Qoder product on an Alibaba cluster with more than 3,000 GPUs, further demonstrating RollArc scalability and robustness. The code is available at https://github.com/alibaba/ROLL.
Part I: Tricks or Traps? A Deep Dive into RL for LLM Reasoning
Aug 11, 2025Reinforcement learning for LLM reasoning has rapidly emerged as a prominent research area, marked by a significant surge in related studies on both algorithmic innovations and practical applications. Despite this progress, several critical challenges remain, including the absence of standardized guidelines for employing RL techniques and a fragmented understanding of their underlying mechanisms. Additionally, inconsistent experimental settings, variations in training data, and differences in model initialization have led to conflicting conclusions, obscuring the key characteristics of these techniques and creating confusion among practitioners when selecting appropriate techniques. This paper systematically reviews widely adopted RL techniques through rigorous reproductions and isolated evaluations within a unified open-source framework. We analyze the internal mechanisms, applicable scenarios, and core principles of each technique through fine-grained experiments, including datasets of varying difficulty, model sizes, and architectures. Based on these insights, we present clear guidelines for selecting RL techniques tailored to specific setups, and provide a reliable roadmap for practitioners navigating the RL for the LLM domain. Finally, we reveal that a minimalist combination of two techniques can unlock the learning capability of critic-free policies using vanilla PPO loss. The results demonstrate that our simple combination consistently improves performance, surpassing strategies like GRPO and DAPO.
Reinforcement Learning Optimization for Large-Scale Learning: An Efficient and User-Friendly Scaling Library
Jun 06, 2025We introduce ROLL, an efficient, scalable, and user-friendly library designed for Reinforcement Learning Optimization for Large-scale Learning. ROLL caters to three primary user groups: tech pioneers aiming for cost-effective, fault-tolerant large-scale training, developers requiring flexible control over training workflows, and researchers seeking agile experimentation. ROLL is built upon several key modules to serve these user groups effectively. First, a single-controller architecture combined with an abstraction of the parallel worker simplifies the development of the training pipeline. Second, the parallel strategy and data transfer modules enable efficient and scalable training. Third, the rollout scheduler offers fine-grained management of each sample's lifecycle during the rollout stage. Fourth, the environment worker and reward worker support rapid and flexible experimentation with agentic RL algorithms and reward designs. Finally, AutoDeviceMapping allows users to assign resources to different models flexibly across various stages.
CombatVLA: An Efficient Vision-Language-Action Model for Combat Tasks in 3D Action Role-Playing Games
Mar 12, 2025
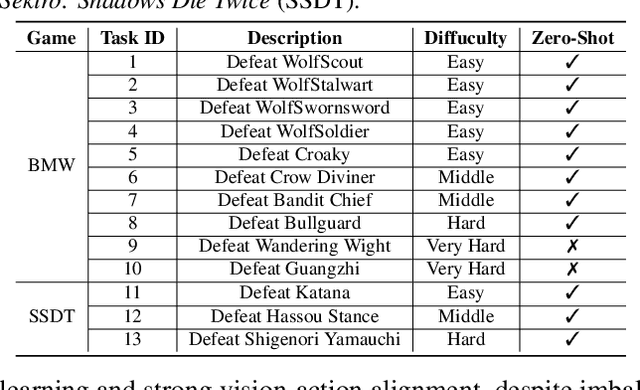

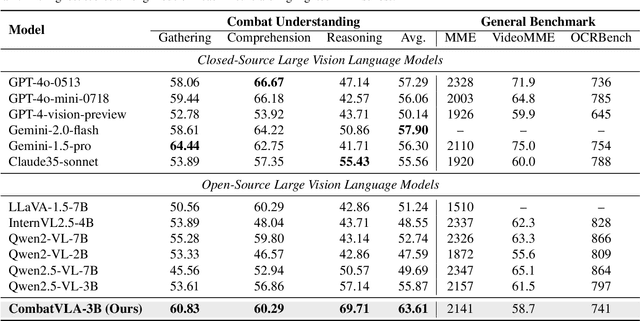
Recent advances in Vision-Language-Action models (VLAs) have expanded the capabilities of embodied intelligence. However, significant challenges remain in real-time decision-making in complex 3D environments, which demand second-level responses, high-resolution perception, and tactical reasoning under dynamic conditions. To advance the field, we introduce CombatVLA, an efficient VLA model optimized for combat tasks in 3D action role-playing games(ARPGs). Specifically, our CombatVLA is a 3B model trained on video-action pairs collected by an action tracker, where the data is formatted as action-of-thought (AoT) sequences. Thereafter, CombatVLA seamlessly integrates into an action execution framework, allowing efficient inference through our truncated AoT strategy. Experimental results demonstrate that CombatVLA not only outperforms all existing models on the combat understanding benchmark but also achieves a 50-fold acceleration in game combat. Moreover, it has a higher task success rate than human players. We will open-source all resources, including the action tracker, dataset, benchmark, model weights, training code, and the implementation of the framework at https://combatvla.github.io/.
Boosting Large-scale Parallel Training Efficiency with C4: A Communication-Driven Approach
Jun 07, 2024


The emergence of Large Language Models (LLMs) has necessitated the adoption of parallel training techniques, involving the deployment of thousands of GPUs to train a single model. Unfortunately, we have found that the efficiency of current parallel training is often suboptimal, largely due to the following two main issues. Firstly, hardware failures are inevitable, leading to interruptions in the training tasks. The inability to quickly identify the faulty components results in a substantial waste of GPU resources. Secondly, since GPUs must wait for parameter synchronization to complete before proceeding to the next round of computation, network congestions can greatly increase the waiting time for GPUs. To address these challenges, this paper introduces a communication-driven solution, namely the C4. The key insights of C4 are two folds. First, in parallel training, collective communication exhibits periodic and homogeneous characteristics, so any anomalies are certainly due to some form of hardware malfunction. By leveraging this feature, C4 can rapidly identify the faulty components, swiftly isolate the anomaly, and restart the task, thereby avoiding resource wastage caused by delays in anomaly detection. Second, the predictable communication model of collective communication, involving few large flows, allows C4 to efficiently execute traffic planning, substantially reducing network congestion. C4 has been extensively implemented across our production systems, cutting error-induced overhead by roughly 30% and enhancing runtime performance by about 15% for certain applications with moderate communication costs.
Rec4Ad: A Free Lunch to Mitigate Sample Selection Bias for Ads CTR Prediction in Taobao
Jun 06, 2023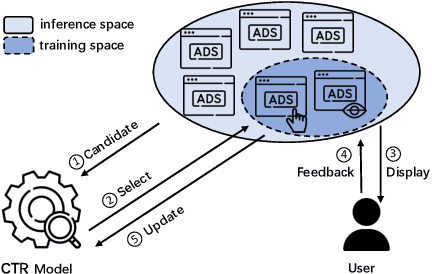
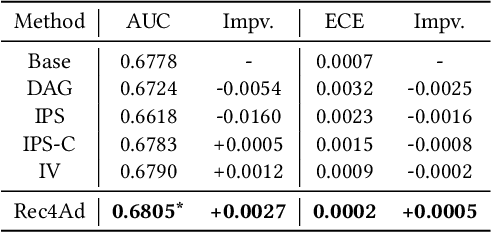
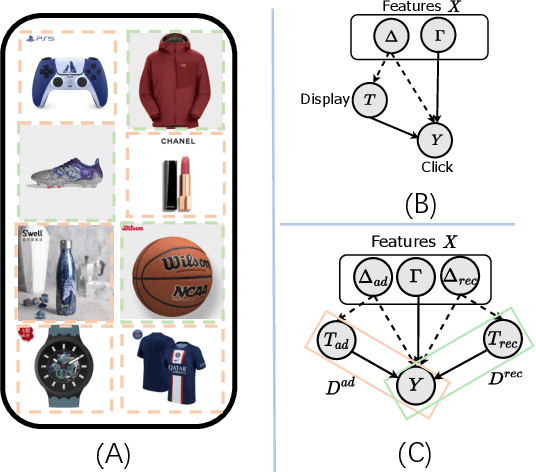
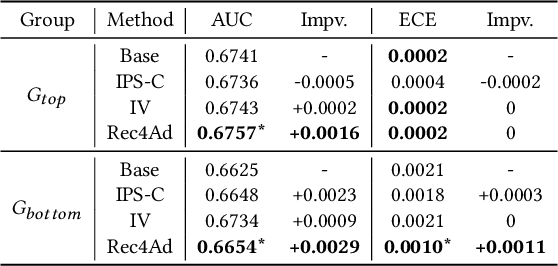
Click-Through Rate (CTR) prediction serves as a fundamental component in online advertising. A common practice is to train a CTR model on advertisement (ad) impressions with user feedback. Since ad impressions are purposely selected by the model itself, their distribution differs from the inference distribution and thus exhibits sample selection bias (SSB) that affects model performance. Existing studies on SSB mainly employ sample re-weighting techniques which suffer from high variance and poor model calibration. Another line of work relies on costly uniform data that is inadequate to train industrial models. Thus mitigating SSB in industrial models with a uniform-data-free framework is worth exploring. Fortunately, many platforms display mixed results of organic items (i.e., recommendations) and sponsored items (i.e., ads) to users, where impressions of ads and recommendations are selected by different systems but share the same user decision rationales. Based on the above characteristics, we propose to leverage recommendations samples as a free lunch to mitigate SSB for ads CTR model (Rec4Ad). After elaborating data augmentation, Rec4Ad learns disentangled representations with alignment and decorrelation modules for enhancement. When deployed in Taobao display advertising system, Rec4Ad achieves substantial gains in key business metrics, with a lift of up to +6.6\% CTR and +2.9\% RPM.