 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReFlow: Self-correction Motion Learning for Dynamic Scene Reconstruction
Apr 02, 2026We present ReFlow, a unified framework for monocular dynamic scene reconstruction that learns 3D motion in a novel self-correction manner from raw video. Existing methods often suffer from incomplete scene initialization for dynamic regions, leading to unstable reconstruction and motion estimation, which often resorts to external dense motion guidance such as pre-computed optical flow to further stabilize and constrain the reconstruction of dynamic components. However, this introduces additional complexity and potential error propagation. To address these issues, ReFlow integrates a Complete Canonical Space Construction module for enhanced initialization of both static and dynamic regions, and a Separation-Based Dynamic Scene Modeling module that decouples static and dynamic components for targeted motion supervision. The core of ReFlow is a novel self-correction flow matching mechanism, consisting of Full Flow Matching to align 3D scene flow with time-varying 2D observations, and Camera Flow Matching to enforce multi-view consistency for static objects. Together, these modules enable robust and accurate dynamic scene reconstruction. Extensive experiments across diverse scenarios demonstrate that ReFlow achieves superior reconstruction quality and robustness, establishing a novel self-correction paradigm for monocular 4D reconstruction.
Track4World: Feedforward World-centric Dense 3D Tracking of All Pixels
Mar 05, 2026Estimating the 3D trajectory of every pixel from a monocular video is crucial and promising for a comprehensive understanding of the 3D dynamics of videos. Recent monocular 3D tracking works demonstrate impressive performance, but are limited to either tracking sparse points on the first frame or a slow optimization-based framework for dense tracking. In this paper, we propose a feedforward model, called Track4World, enabling an efficient holistic 3D tracking of every pixel in the world-centric coordinate system. Built on the global 3D scene representation encoded by a VGGT-style ViT, Track4World applies a novel 3D correlation scheme to simultaneously estimate the pixel-wise 2D and 3D dense flow between arbitrary frame pairs. The estimated scene flow, along with the reconstructed 3D geometry, enables subsequent efficient 3D tracking of every pixel of this video. Extensive experiments on multiple benchmarks demonstrate that our approach consistently outperforms existing methods in 2D/3D flow estimation and 3D tracking, highlighting its robustness and scalability for real-world 4D reconstruction tasks.
MotionCrafter: Dense Geometry and Motion Reconstruction with a 4D VAE
Feb 09, 2026We introduce MotionCrafter, a video diffusion-based framework that jointly reconstructs 4D geometry and estimates dense motion from a monocular video. The core of our method is a novel joint representation of dense 3D point maps and 3D scene flows in a shared coordinate system, and a novel 4D VAE to effectively learn this representation. Unlike prior work that forces the 3D value and latents to align strictly with RGB VAE latents-despite their fundamentally different distributions-we show that such alignment is unnecessary and leads to suboptimal performance. Instead, we introduce a new data normalization and VAE training strategy that better transfers diffusion priors and greatly improves reconstruction quality. Extensive experiments across multiple datasets demonstrate that MotionCrafter achieves state-of-the-art performance in both geometry reconstruction and dense scene flow estimation, delivering 38.64% and 25.0% improvements in geometry and motion reconstruction, respectively, all without any post-optimization. Project page: https://ruijiezhu94.github.io/MotionCrafter_Page
SkeletonGaussian: Editable 4D Generation through Gaussian Skeletonization
Feb 04, 20264D generation has made remarkable progress in synthesizing dynamic 3D objects from input text, images, or videos. However, existing methods often represent motion as an implicit deformation field, which limits direct control and editability. To address this issue, we propose SkeletonGaussian, a novel framework for generating editable dynamic 3D Gaussians from monocular video input. Our approach introduces a hierarchical articulated representation that decomposes motion into sparse rigid motion explicitly driven by a skeleton and fine-grained non-rigid motion. Concretely, we extract a robust skeleton and drive rigid motion via linear blend skinning, followed by a hexplane-based refinement for non-rigid deformations, enhancing interpretability and editability. Experimental results demonstrate that SkeletonGaussian surpasses existing methods in generation quality while enabling intuitive motion editing, establishing a new paradigm for editable 4D generation. Project page: https://wusar.github.io/projects/skeletongaussian/
MeshSplat: Generalizable Sparse-View Surface Reconstruction via Gaussian Splatting
Aug 25, 2025Surface reconstruction has been widely studied in computer vision and graphics. However, existing surface reconstruction works struggle to recover accurate scene geometry when the input views are extremely sparse. To address this issue, we propose MeshSplat, a generalizable sparse-view surface reconstruction framework via Gaussian Splatting. Our key idea is to leverage 2DGS as a bridge, which connects novel view synthesis to learned geometric priors and then transfers these priors to achieve surface reconstruction. Specifically, we incorporate a feed-forward network to predict per-view pixel-aligned 2DGS, which enables the network to synthesize novel view images and thus eliminates the need for direct 3D ground-truth supervision. To improve the accuracy of 2DGS position and orientation prediction, we propose a Weighted Chamfer Distance Loss to regularize the depth maps, especially in overlapping areas of input views, and also a normal prediction network to align the orientation of 2DGS with normal vectors predicted by a monocular normal estimator. Extensive experiments validate the effectiveness of our proposed improvement, demonstrating that our method achieves state-of-the-art performance in generalizable sparse-view mesh reconstruction tasks. Project Page: https://hanzhichang.github.io/meshsplat_web
Scaling Linear Attention with Sparse State Expansion
Jul 22, 2025The Transformer architecture, despite its widespread success, struggles with long-context scenarios due to quadratic computation and linear memory growth. While various linear attention variants mitigate these efficiency constraints by compressing context into fixed-size states, they often degrade performance in tasks such as in-context retrieval and reasoning. To address this limitation and achieve more effective context compression, we propose two key innovations. First, we introduce a row-sparse update formulation for linear attention by conceptualizing state updating as information classification. This enables sparse state updates via softmax-based top-$k$ hard classification, thereby extending receptive fields and reducing inter-class interference. Second, we present Sparse State Expansion (SSE) within the sparse framework, which expands the contextual state into multiple partitions, effectively decoupling parameter size from state capacity while maintaining the sparse classification paradigm. Our design, supported by efficient parallelized implementations, yields effective classification and discriminative state representations. We extensively validate SSE in both pure linear and hybrid (SSE-H) architectures across language modeling, in-context retrieval, and mathematical reasoning benchmarks. SSE demonstrates strong retrieval performance and scales favorably with state size. Moreover, after reinforcement learning (RL) training, our 2B SSE-H model achieves state-of-the-art mathematical reasoning performance among small reasoning models, scoring 64.7 on AIME24 and 51.3 on AIME25, significantly outperforming similarly sized open-source Transformers. These results highlight SSE as a promising and efficient architecture for long-context modeling.
ZeCO: Zero Communication Overhead Sequence Parallelism for Linear Attention
Jul 02, 2025Linear attention mechanisms deliver significant advantages for Large Language Models (LLMs) by providing linear computational complexity, enabling efficient processing of ultra-long sequences (e.g., 1M context). However, existing Sequence Parallelism (SP) methods, essential for distributing these workloads across devices, become the primary bottleneck due to substantial communication overhead. In this paper, we introduce ZeCO (Zero Communication Overhead) sequence parallelism for linear attention models, a new SP method designed to overcome these limitations and achieve end-to-end near-linear scalability for long sequence training. For example, training a model with a 1M sequence length across 64 devices using ZeCO takes roughly the same time as training with an 16k sequence on a single device. At the heart of ZeCO lies All-Scan, a new collective communication primitive. All-Scan provides each SP rank with precisely the initial operator state it requires while maintaining a minimal communication footprint, effectively eliminating communication overhead. Theoretically, we prove the optimaity of ZeCO, showing that it introduces only negligible time and space overhead. Empirically, we compare the communication costs of different sequence parallelism strategies and demonstrate that All-Scan achieves the fastest communication in SP scenarios. Specifically, on 256 GPUs with an 8M sequence length, ZeCO achieves a 60\% speedup compared to the current state-of-the-art (SOTA) SP method. We believe ZeCO establishes a clear path toward efficiently training next-generation LLMs on previously intractable sequence lengths.
DepthMaster: Taming Diffusion Models for Monocular Depth Estimation
Jan 05, 2025



Monocular depth estimation within the diffusion-denoising paradigm demonstrates impressive generalization ability but suffers from low inference speed. Recent methods adopt a single-step deterministic paradigm to improve inference efficiency while maintaining comparable performance. However, they overlook the gap between generative and discriminative features, leading to suboptimal results. In this work, we propose DepthMaster, a single-step diffusion model designed to adapt generative features for the discriminative depth estimation task. First, to mitigate overfitting to texture details introduced by generative features, we propose a Feature Alignment module, which incorporates high-quality semantic features to enhance the denoising network's representation capability. Second, to address the lack of fine-grained details in the single-step deterministic framework, we propose a Fourier Enhancement module to adaptively balance low-frequency structure and high-frequency details. We adopt a two-stage training strategy to fully leverage the potential of the two modules. In the first stage, we focus on learning the global scene structure with the Feature Alignment module, while in the second stage, we exploit the Fourier Enhancement module to improve the visual quality. Through these efforts, our model achieves state-of-the-art performance in terms of generalization and detail preservation, outperforming other diffusion-based methods across various datasets. Our project page can be found at https://indu1ge.github.io/DepthMaster_page.
Reflections from the 2024 Large Language Model (LLM) Hackathon for Applications in Materials Science and Chemistry
Nov 20, 2024
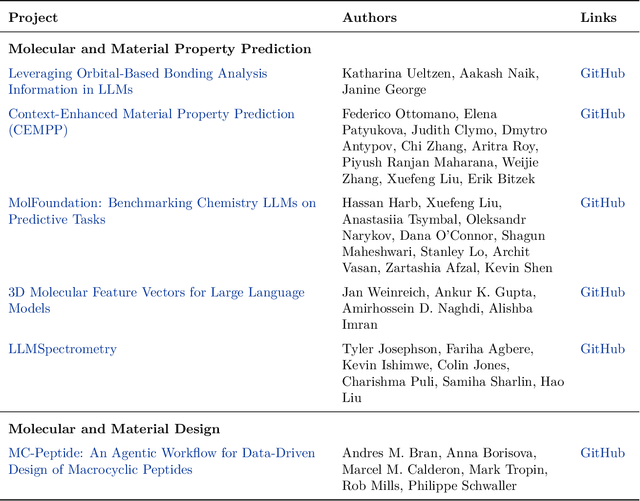
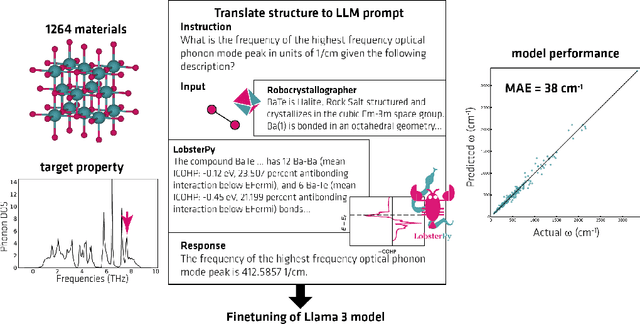
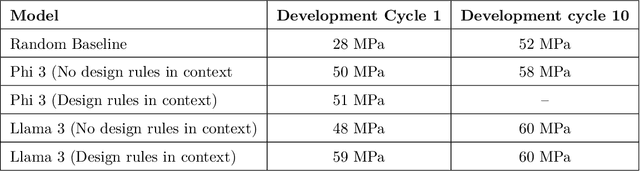
Here, we present the outcomes from the second Large Language Model (LLM) Hackathon for Applications in Materials Science and Chemistry, which engaged participants across global hybrid locations, resulting in 34 team submissions. The submissions spanned seven key application areas and demonstrated the diverse utility of LLMs for applications in (1) molecular and material property prediction; (2) molecular and material design; (3) automation and novel interfaces; (4) scientific communication and education; (5) research data management and automation; (6) hypothesis generation and evaluation; and (7) knowledge extraction and reasoning from scientific literature. Each team submission is presented in a summary table with links to the code and as brief papers in the appendix. Beyond team results, we discuss the hackathon event and its hybrid format, which included physical hubs in Toronto, Montreal, San Francisco, Berlin, Lausanne, and Tokyo, alongside a global online hub to enable local and virtual collaboration. Overall, the event highlighted significant improvements in LLM capabilities since the previous year's hackathon, suggesting continued expansion of LLMs for applications in materials science and chemistry research. These outcomes demonstrate the dual utility of LLMs as both multipurpose models for diverse machine learning tasks and platforms for rapid prototyping custom applications in scientific research.
MetaLA: Unified Optimal Linear Approximation to Softmax Attention Map
Nov 16, 2024



Various linear complexity models, such as Linear Transformer (LinFormer), State Space Model (SSM), and Linear RNN (LinRNN), have been proposed to replace the conventional softmax attention in Transformer structures. However, the optimal design of these linear models is still an open question. In this work, we attempt to answer this question by finding the best linear approximation to softmax attention from a theoretical perspective. We start by unifying existing linear complexity models as the linear attention form and then identify three conditions for the optimal linear attention design: 1) Dynamic memory ability; 2) Static approximation ability; 3) Least parameter approximation. We find that none of the current linear models meet all three conditions, resulting in suboptimal performance. Instead, we propose Meta Linear Attention (MetaLA) as a solution that satisfies these conditions. Our experiments on Multi-Query Associative Recall (MQAR) task, language modeling, image classification, and Long-Range Arena (LRA) benchmark demonstrate that MetaLA is more effective than the existing linear models.