 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTadA-Bench: A Million-Variant Benchmark for Future-Round Discovery Toward Agentic Protein Engineering
May 29, 2026AI for scientific discovery is entering an agentic era, where protein-engineering systems are expected to prioritize future wet-lab experiments rather than merely fit static measurements. We introduce TadA-Bench, a million-variant wet-lab replay benchmark from 31 TadA directed-evolution rounds for future-round discovery toward agentic protein engineering. TadA-Bench preserves the campaign chronology and defines a fixed-data replay task: given earlier experimental rounds, models rank variants that appear only in later rounds. It provides aligned DNA, RNA, and protein views, and uses Seq2Graph, a graph-based label-unification pipeline, to reconcile noisy enrichment measurements into consistent cross-round activity labels. Random-split controls show strong interpolation, but future-round ranking and finite-budget candidate selection are much weaker. Controlled analyses suggest that evolutionary coverage is more informative than local data density, positioning TadA-Bench as a reproducible wet-lab replay substrate for future-round discovery toward agentic protein engineering; the data and code are released on Hugging Face and GitHub.
OneDrive: Unified Multi-Paradigm Driving with Vision-Language-Action Models
Apr 20, 2026Vision-Language Models(VLMs) excel at autoregressive text generation, yet end-to-end autonomous driving requires multi-task learning with structured outputs and heterogeneous decoding behaviors, such as autoregressive language generation, parallel object detection and trajectory regression. To accommodate these differences, existing systems typically introduce separate or cascaded decoders, resulting in architectural fragmentation and limited backbone reuse. In this work, we present a unified autonomous driving framework built upon a pretrained VLM, where heterogeneous decoding behaviors are reconciled within a single transformer decoder. We demonstrate that pretrained VLM attention exhibits strong transferability beyond pure language modeling. By organizing visual and structured query tokens within a single causal decoder, structured queries can naturally condition on visual context through the original attention mechanism. Textual and structured outputs share a common attention backbone, enabling stable joint optimization across heterogeneous tasks. Trajectory planning is realized within the same causal LLM decoder by introducing structured trajectory queries. This unified formulation enables planning to share the pretrained attention backbone with images and perception tokens. Extensive experiments on end-to-end autonomous driving benchmarks demonstrate state-of-the-art performance, including 0.28 L2 and 0.18 collision rate on nuScenes open-loop evaluation and competitive results (86.8 PDMS) on NAVSIM closed-loop evaluation. The full model preserves multi-modal generation capability, while an efficient inference mode achieves approximately 40% lower latency. Code and models are available at https://github.com/Z1zyw/OneDrive
Aligned Agents, Biased Swarm: Measuring Bias Amplification in Multi-Agent Systems
Apr 13, 2026While Multi-Agent Systems (MAS) are increasingly deployed for complex workflows, their emergent properties-particularly the accumulation of bias-remain poorly understood. Because real-world MAS are too complex to analyze entirely, evaluating their ethical robustness requires first isolating their foundational mechanics. In this work, we conduct a baseline empirical study investigating how basic MAS topologies and feedback loops influence prejudice. Contrary to the assumption that multi-agent collaboration naturally dilutes bias, we hypothesize that structured workflows act as echo chambers, amplifying minor stochastic biases into systemic polarization. To evaluate this, we introduce Discrim-Eval-Open, an open-ended benchmark that bypasses individual model neutrality through forced comparative judgments across demographic groups. Analyzing bias cascades across various structures reveals that architectural sophistication frequently exacerbates bias rather than mitigating it. We observe systemic amplification even when isolated agents operate neutrally, and identify a 'Trigger Vulnerability' where injecting purely objective context drastically accelerates polarization. By stripping away advanced swarm complexity to study foundational dynamics, we establish a crucial baseline: structural complexity does not guarantee ethical robustness. Our code is available at https://github.com/weizhihao1/MAS-Bias.
Credit-Budgeted ICPC-Style Coding: When Agents Must Pay for Every Decision
Apr 11, 2026Current evaluations of autonomous coding agents assume an unrealistic, infinite-resource environment. However, real-world software engineering is a resource-bound competition. As we scale toward large agent swarms, ignoring compute and time costs risks catastrophic budget exhaustion. To shift the focus from isolated accuracy to cost-aware problem-solving, we introduce USACOArena, an interactive ACM-ICPC-style arena driven by a strict "credit" economy. Every generated token, local test, and elapsed second depletes a fixed budget, forcing agents to make strategic trade-offs. Our comprehensive profiling reveals that frontier single agents and swarms currently fail to optimally balance accuracy with these constraints, exhibiting divergent, path-dependent behaviors. Ultimately, USACOArena provides an essential dynamic training ground for developing highly efficient, resource-aware agent architectures.
MMPhysVideo: Scaling Physical Plausibility in Video Generation via Joint Multimodal Modeling
Apr 03, 2026Despite advancements in generating visually stunning content, video diffusion models (VDMs) often yield physically inconsistent results due to pixel-only reconstruction. To address this, we propose MMPhysVideo, the first framework to scale physical plausibility in video generation through joint multimodal modeling. We recast perceptual cues, specifically semantics, geometry, and spatio-temporal trajectory, into a unified pseudo-RGB format, enabling VDMs to directly capture complex physical dynamics. To mitigate cross-modal interference, we propose a Bidirectionally Controlled Teacher architecture, which utilizes parallel branches to fully decouple RGB and perception processing and adopts two zero-initialized control links to gradually learn pixel-wise consistency. For inference efficiency, the teacher's physical prior is distilled into a single-stream student model via representation alignment. Furthermore, we present MMPhysPipe, a scalable data curation and annotation pipeline tailored for constructing physics-rich multimodal datasets. MMPhysPipe employs a vision-language model (VLM) guided by a chain-of-visual-evidence rule to pinpoint physical subjects, enabling expert models to extract multi-granular perceptual information. Without additional inference costs, MMPhysVideo consistently improves physical plausibility and visual quality over advanced models across various benchmarks and achieves state-of-the-art performance compared to existing methods.
MI-DETR: A Strong Baseline for Moving Infrared Small Target Detection with Bio-Inspired Motion Integration
Mar 05, 2026Infrared small target detection (ISTD) is challenging because tiny, low-contrast targets are easily obscured by complex and dynamic backgrounds. Conventional multi-frame approaches typically learn motion implicitly through deep neural networks, often requiring additional motion supervision or explicit alignment modules. We propose Motion Integration DETR (MI-DETR), a bio-inspired dual-pathway detector that processes one infrared frame per time step while explicitly modeling motion. First, a retina-inspired cellular automaton (RCA) converts raw frame sequences into a motion map defined on the same pixel grid as the appearance image, enabling parvocellular-like appearance and magnocellular-like motion pathways to be supervised by a single set of bounding boxes without extra motion labels or alignment operations. Second, a Parvocellular-Magnocellular Interconnection (PMI) Block facilitates bidirectional feature interaction between the two pathways, providing a biologically motivated intermediate interconnection mechanism. Finally, a RT-DETR decoder operates on features from the two pathways to produce detection results. Surprisingly, our proposed simple yet effective approach yields strong performance on three commonly used ISTD benchmarks. MI-DETR achieves 70.3% mAP@50 and 72.7% F1 on IRDST-H (+26.35 mAP@50 over the best multi-frame baseline), 98.0% mAP@50 on DAUB-R, and 88.3% mAP@50 on ITSDT-15K, demonstrating the effectiveness of biologically inspired motion-appearance integration. Code is available at https://github.com/nliu-25/MI-DETR.
SoLA-Vision: Fine-grained Layer-wise Linear Softmax Hybrid Attention
Jan 16, 2026Standard softmax self-attention excels in vision tasks but incurs quadratic complexity O(N^2), limiting high-resolution deployment. Linear attention reduces the cost to O(N), yet its compressed state representations can impair modeling capacity and accuracy. We present an analytical study that contrasts linear and softmax attention for visual representation learning from a layer-stacking perspective. We further conduct systematic experiments on layer-wise hybridization patterns of linear and softmax attention. Our results show that, compared with rigid intra-block hybrid designs, fine-grained layer-wise hybridization can match or surpass performance while requiring fewer softmax layers. Building on these findings, we propose SoLA-Vision (Softmax-Linear Attention Vision), a flexible layer-wise hybrid attention backbone that enables fine-grained control over how linear and softmax attention are integrated. By strategically inserting a small number of global softmax layers, SoLA-Vision achieves a strong trade-off between accuracy and computational cost. On ImageNet-1K, SoLA-Vision outperforms purely linear and other hybrid attention models. On dense prediction tasks, it consistently surpasses strong baselines by a considerable margin. Code will be released.
Integrating Diverse Assignment Strategies into DETRs
Jan 14, 2026Label assignment is a critical component in object detectors, particularly within DETR-style frameworks where the one-to-one matching strategy, despite its end-to-end elegance, suffers from slow convergence due to sparse supervision. While recent works have explored one-to-many assignments to enrich supervisory signals, they often introduce complex, architecture-specific modifications and typically focus on a single auxiliary strategy, lacking a unified and scalable design. In this paper, we first systematically investigate the effects of ``one-to-many'' supervision and reveal a surprising insight that performance gains are driven not by the sheer quantity of supervision, but by the diversity of the assignment strategies employed. This finding suggests that a more elegant, parameter-efficient approach is attainable. Building on this insight, we propose LoRA-DETR, a flexible and lightweight framework that seamlessly integrates diverse assignment strategies into any DETR-style detector. Our method augments the primary network with multiple Low-Rank Adaptation (LoRA) branches during training, each instantiating a different one-to-many assignment rule. These branches act as auxiliary modules that inject rich, varied supervisory gradients into the main model and are discarded during inference, thus incurring no additional computational cost. This design promotes robust joint optimization while maintaining the architectural simplicity of the original detector. Extensive experiments on different baselines validate the effectiveness of our approach. Our work presents a new paradigm for enhancing detectors, demonstrating that diverse ``one-to-many'' supervision can be integrated to achieve state-of-the-art results without compromising model elegance.
From Idea to Co-Creation: A Planner-Actor-Critic Framework for Agent Augmented 3D Modeling
Jan 08, 2026We present a framework that extends the Actor-Critic architecture to creative 3D modeling through multi-agent self-reflection and human-in-the-loop supervision. While existing approaches rely on single-prompt agents that directly execute modeling commands via tools like Blender MCP, our approach introduces a Planner-Actor-Critic architecture. In this design, the Planner coordinates modeling steps, the Actor executes them, and the Critic provides iterative feedback, while human users act as supervisors and advisors throughout the process. Through systematic comparison between single-prompt modeling and our reflective multi-agent approach, we demonstrate improvements in geometric accuracy, aesthetic quality, and task completion rates across diverse 3D modeling scenarios. Our evaluation reveals that critic-guided reflection, combined with human supervisory input, reduces modeling errors and increases complexity and quality of the result compared to direct single-prompt execution. This work establishes that structured agent self-reflection, when augmented by human oversight and advisory guidance, produces higher-quality 3D models while maintaining efficient workflow integration through real-time Blender synchronization.
Step-GUI Technical Report
Dec 19, 2025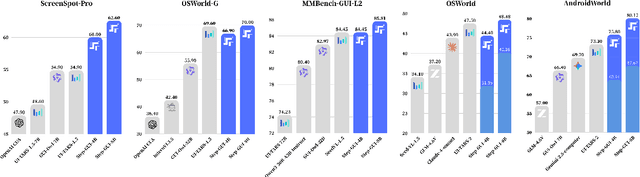
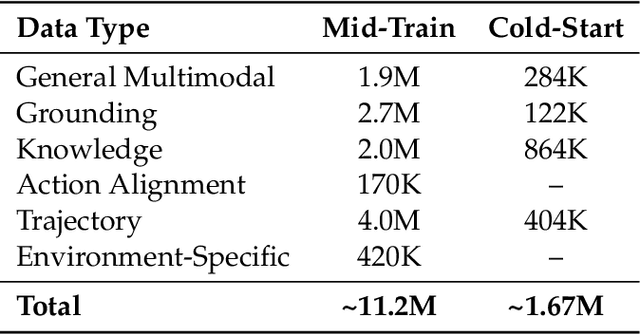
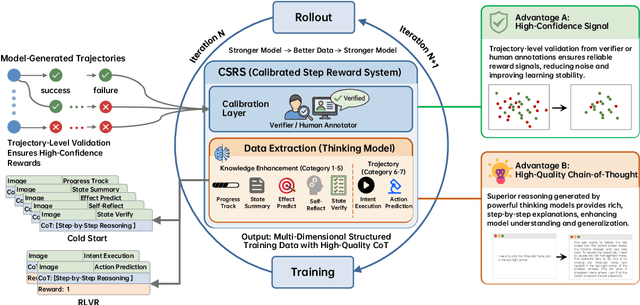
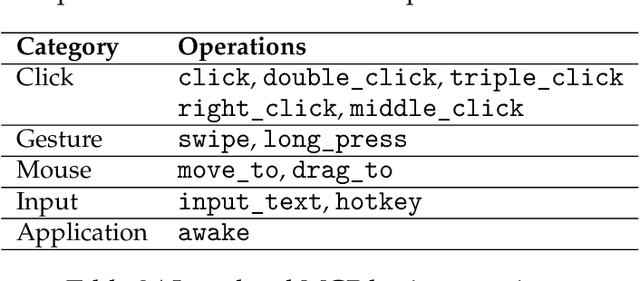
Recent advances in multimodal large language models unlock unprecedented opportunities for GUI automation. However, a fundamental challenge remains: how to efficiently acquire high-quality training data while maintaining annotation reliability? We introduce a self-evolving training pipeline powered by the Calibrated Step Reward System, which converts model-generated trajectories into reliable training signals through trajectory-level calibration, achieving >90% annotation accuracy with 10-100x lower cost. Leveraging this pipeline, we introduce Step-GUI, a family of models (4B/8B) that achieves state-of-the-art GUI performance (8B: 80.2% AndroidWorld, 48.5% OSWorld, 62.6% ScreenShot-Pro) while maintaining robust general capabilities. As GUI agent capabilities improve, practical deployment demands standardized interfaces across heterogeneous devices while protecting user privacy. To this end, we propose GUI-MCP, the first Model Context Protocol for GUI automation with hierarchical architecture that combines low-level atomic operations and high-level task delegation to local specialist models, enabling high-privacy execution where sensitive data stays on-device. Finally, to assess whether agents can handle authentic everyday usage, we introduce AndroidDaily, a benchmark grounded in real-world mobile usage patterns with 3146 static actions and 235 end-to-end tasks across high-frequency daily scenarios (8B: static 89.91%, end-to-end 52.50%). Our work advances the development of practical GUI agents and demonstrates strong potential for real-world deployment in everyday digital interactions.