 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStagnant Neuron: Towards Understanding the Plasticity Loss in Multi-Agent Reinforcement Learning Value Factorization Methods
Jun 24, 2026Multi-Agent Reinforcement Learning (MARL) value factorization methods can suffer from a loss of plasticity, gradually failing to adapt when transferring to new task instances. We trace this issue to stagnant neurons, units whose gradient updates become negligibly small relative to their weights, thereby hindering learning. While existing plasticity injection methods exist, they prove ineffective for such neurons. To address this, we propose Knowledge-retentive Neuron-level PlastIcity Focusing InjEction (KNIFE), a novel method that directly targets stagnant neurons. KNIFE replaces each stagnant neuron with a composite unit comprising three specialized components: a frozen knowledge neuron to preserve acquired knowledge, a re-initialized active neuron to restore learning capacity, and a compensation neuron to ensure the combined output matches the original, thus maintaining previous learned cooperation knowledge. Extensive experiments on SMACv2, predator-prey, and matrix games demonstrate that KNIFE significantly outperforms state-of-the-art plasticity injection methods.
When Rules Learn: A Self-Evolving Agent for Legal Case Retrieval
Jun 15, 2026Legal case retrieval remains challenging due to the complexity of legal language and the need for precise lexical alignment between queries and relevant cases. Although dense retrieval models have achieved notable progress, empirical studies show that BM25 continues to serve as a strong baseline in this domain. It motivates us to propose a self-evolving framework for rule-driven query rewriting that enhances BM25 without any parameter training. The framework equips an LLM-based agent with an automatic evaluation environment, enabling it to iteratively create rewriting rules, plan validation experiments over rule combinations, and eliminate ineffective rules based on historical feedbacks. We evaluate our method on the Chinese legal case retrieval benchmark LeCaRD-v2. Experimental results demonstrate that the proposed framework outperforms non-evolutionary baselines, including human-designed rules and greedy rule selection, particularly when powered by a highcapacity core LLM. We also conduct detailed analyses to investigate the mechanisms underlying self-evolution. Our findings reveal that LLM's capabilities to leverage previous experimental results and its intrinsic knowledge of rule elimination play critical roles in refining the rule set via self-evolution.
Y-BotFrame: An Extensible Embodied Agent Framework for Quadruped Robot Assistants
Jun 11, 2026Quadruped robots are capable of traversing a wide range of complex terrains with high flexibility. As highly mobile ground-based intelligent platforms, they can be equipped with modules for navigation control, environmental perception, and intelligent interaction, thereby serving as real-world mobile deployment platforms for various algorithms. In this paper, we introduce Y-BotFrame, an extensible embodied platform that turns a robot into an intelligent ground assistant. Y-BotFrame integrates multimodal perception capabilities, including speech, vision, and LiDAR, and employs a large language model as the cognitive core for environmental understanding, contextual reasoning, and task planning. The system maps user natural-language instructions into executable embodied task units that can be carried out by the robot. Y-BotFrame supports natural interaction through voice commands and visual feedback, removing the need for a remote controller and enabling efficient human-robot collaboration. With a highly extensible framework, Y-BotFrame supports plug-and-play integration of new functional modules as well as modular upgrades and iterative development, offering a reference implementation for the real-world deployment of general-purpose, instruction-driven embodied agents.The supplementary video is available at https://xdei-group.github.io/Y-BotFrame/.
HoRD: Robust Humanoid Control via History-Conditioned Reinforcement Learning and Online Distillation
Feb 05, 2026Humanoid robots can suffer significant performance drops under small changes in dynamics, task specifications, or environment setup. We propose HoRD, a two-stage learning framework for robust humanoid control under domain shift. First, we train a high-performance teacher policy via history-conditioned reinforcement learning, where the policy infers latent dynamics context from recent state--action trajectories to adapt online to diverse randomized dynamics. Second, we perform online distillation to transfer the teacher's robust control capabilities into a transformer-based student policy that operates on sparse root-relative 3D joint keypoint trajectories. By combining history-conditioned adaptation with online distillation, HoRD enables a single policy to adapt zero-shot to unseen domains without per-domain retraining. Extensive experiments show HoRD outperforms strong baselines in robustness and transfer, especially under unseen domains and external perturbations. Code and project page are available at https://tonywang-0517.github.io/hord/.
CheXPO-v2: Preference Optimization for Chest X-ray VLMs with Knowledge Graph Consistency
Dec 19, 2025Medical Vision-Language Models (VLMs) are prone to hallucinations, compromising clinical reliability. While reinforcement learning methods like Group Relative Policy Optimization (GRPO) offer a low-cost alignment solution, their reliance on sparse, outcome-based rewards inadvertently encourages models to "overthink" -- generating verbose, convoluted, and unverifiable Chain-of-Thought reasoning to justify answers. This focus on outcomes obscures factual errors and poses significant safety risks. To address this, we propose CheXPO-v2, a novel alignment framework that shifts from outcome to process supervision. Our core innovation is a Knowledge Graph Consistency Reward mechanism driven by Entity-Relation Matching. By explicitly parsing reasoning steps into structured "Disease, Relation, Anatomy" triplets, we provide fine-grained supervision that penalizes incoherent logic and hallucinations at the atomic level. Integrating this with a hard-example mining strategy, our approach significantly outperforms GRPO and state-of-the-art models on benchmarks like MIMIC-CXR-VQA. Crucially, CheXPO-v2 achieves new state-of-the-art accuracy using only 5k samples, demonstrating exceptional data efficiency while producing clinically sound and verifiable reasoning. The project source code is publicly available at: https://github.com/ecoxial2007/CheX-Phi4MM.
Unveiling the Landscape of Clinical Depression Assessment: From Behavioral Signatures to Psychiatric Reasoning
Aug 06, 2025Depression is a widespread mental disorder that affects millions worldwide. While automated depression assessment shows promise, most studies rely on limited or non-clinically validated data, and often prioritize complex model design over real-world effectiveness. In this paper, we aim to unveil the landscape of clinical depression assessment. We introduce C-MIND, a clinical neuropsychiatric multimodal diagnosis dataset collected over two years from real hospital visits. Each participant completes three structured psychiatric tasks and receives a final diagnosis from expert clinicians, with informative audio, video, transcript, and functional near-infrared spectroscopy (fNIRS) signals recorded. Using C-MIND, we first analyze behavioral signatures relevant to diagnosis. We train a range of classical models to quantify how different tasks and modalities contribute to diagnostic performance, and dissect the effectiveness of their combinations. We then explore whether LLMs can perform psychiatric reasoning like clinicians and identify their clear limitations in realistic clinical settings. In response, we propose to guide the reasoning process with clinical expertise and consistently improves LLM diagnostic performance by up to 10% in Macro-F1 score. We aim to build an infrastructure for clinical depression assessment from both data and algorithmic perspectives, enabling C-MIND to facilitate grounded and reliable research for mental healthcare.
CheXPO: Preference Optimization for Chest X-ray VLMs with Counterfactual Rationale
Jul 09, 2025Vision-language models (VLMs) are prone to hallucinations that critically compromise reliability in medical applications. While preference optimization can mitigate these hallucinations through clinical feedback, its implementation faces challenges such as clinically irrelevant training samples, imbalanced data distributions, and prohibitive expert annotation costs. To address these challenges, we introduce CheXPO, a Chest X-ray Preference Optimization strategy that combines confidence-similarity joint mining with counterfactual rationale. Our approach begins by synthesizing a unified, fine-grained multi-task chest X-ray visual instruction dataset across different question types for supervised fine-tuning (SFT). We then identify hard examples through token-level confidence analysis of SFT failures and use similarity-based retrieval to expand hard examples for balancing preference sample distributions, while synthetic counterfactual rationales provide fine-grained clinical preferences, eliminating the need for additional expert input. Experiments show that CheXPO achieves 8.93% relative performance gain using only 5% of SFT samples, reaching state-of-the-art performance across diverse clinical tasks and providing a scalable, interpretable solution for real-world radiology applications.
NTIRE 2025 Challenge on Image Super-Resolution ($\times$4): Methods and Results
Apr 20, 2025This paper presents the NTIRE 2025 image super-resolution ($\times$4) challenge, one of the associated competitions of the 10th NTIRE Workshop at CVPR 2025. The challenge aims to recover high-resolution (HR) images from low-resolution (LR) counterparts generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective network designs or solutions that achieve state-of-the-art SR performance. To reflect the dual objectives of image SR research, the challenge includes two sub-tracks: (1) a restoration track, emphasizes pixel-wise accuracy and ranks submissions based on PSNR; (2) a perceptual track, focuses on visual realism and ranks results by a perceptual score. A total of 286 participants registered for the competition, with 25 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, the main results, and methods of each team. The challenge serves as a benchmark to advance the state of the art and foster progress in image SR.
LightLLM: A Versatile Large Language Model for Predictive Light Sensing
Nov 20, 2024



We propose LightLLM, a model that fine tunes pre-trained large language models (LLMs) for light-based sensing tasks. It integrates a sensor data encoder to extract key features, a contextual prompt to provide environmental information, and a fusion layer to combine these inputs into a unified representation. This combined input is then processed by the pre-trained LLM, which remains frozen while being fine-tuned through the addition of lightweight, trainable components, allowing the model to adapt to new tasks without altering its original parameters. This approach enables flexible adaptation of LLM to specialized light sensing tasks with minimal computational overhead and retraining effort. We have implemented LightLLM for three light sensing tasks: light-based localization, outdoor solar forecasting, and indoor solar estimation. Using real-world experimental datasets, we demonstrate that LightLLM significantly outperforms state-of-the-art methods, achieving 4.4x improvement in localization accuracy and 3.4x improvement in indoor solar estimation when tested in previously unseen environments. We further demonstrate that LightLLM outperforms ChatGPT-4 with direct prompting, highlighting the advantages of LightLLM's specialized architecture for sensor data fusion with textual prompts.
ERQ: Error Reduction for Post-Training Quantization of Vision Transformers
Jul 09, 2024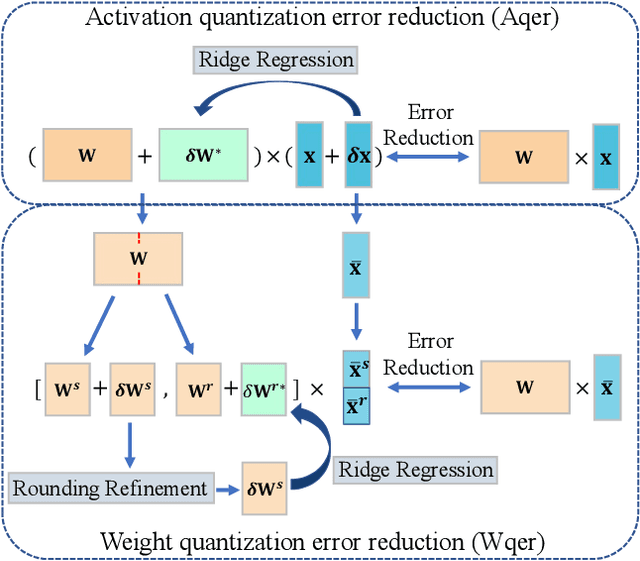

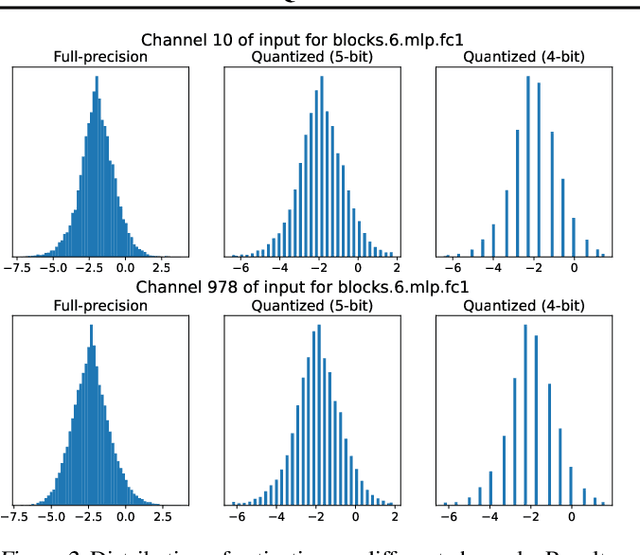
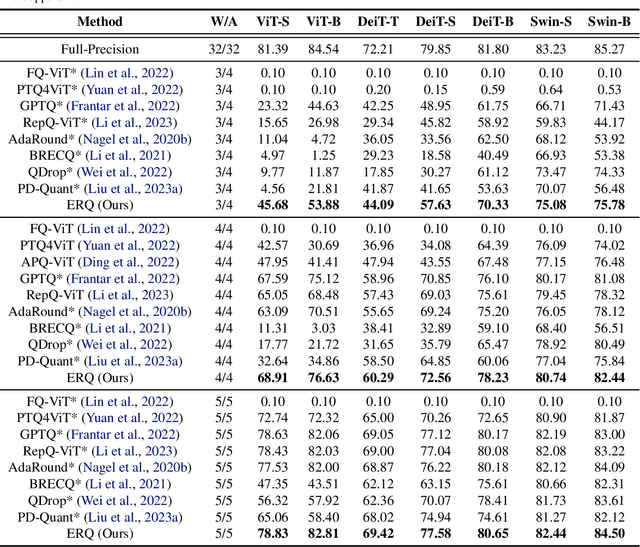
Post-training quantization (PTQ) for vision transformers (ViTs) has garnered significant attention due to its efficiency in compressing models. However, existing methods typically overlook the intricate interdependence between quantized weight and activation, leading to considerable quantization error. In this paper, we propose ERQ, a two-step PTQ approach meticulously crafted to sequentially reduce the quantization error arising from activation and weight quantization. ERQ first introduces Activation quantization error reduction (Aqer) that strategically formulates the minimization of activation quantization error as a Ridge Regression problem, tackling it by updating weights with full-precision. Subsequently, ERQ introduces Weight quantization error reduction (Wqer) that adopts an iterative approach to mitigate the quantization error induced by weight quantization. In each iteration, an empirically derived, efficient proxy is employed to refine the rounding directions of quantized weights, coupled with a Ridge Regression solver to curtail weight quantization error. Experimental results attest to the effectiveness of our approach. Notably, ERQ surpasses the state-of-the-art GPTQ by 22.36% in accuracy for W3A4 ViT-S.