 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObstacle Crossing by Multi-mobile Robots in Object Transportation with Deformable Sheet
Paper and Code
Nov 17, 2021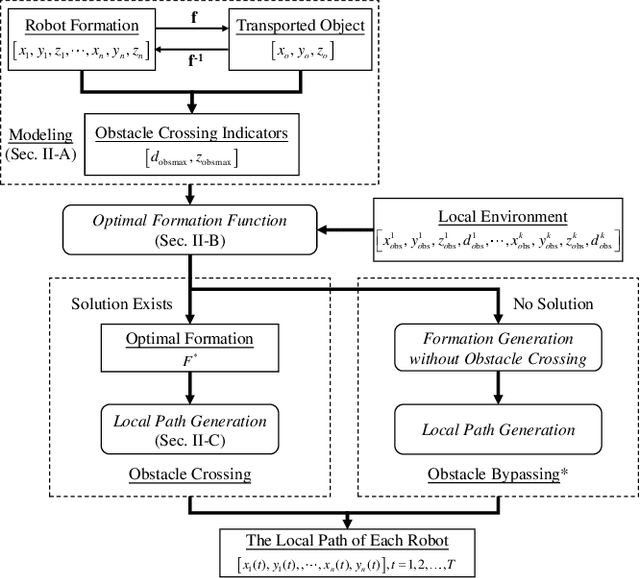
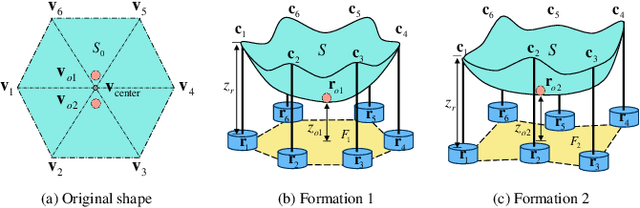
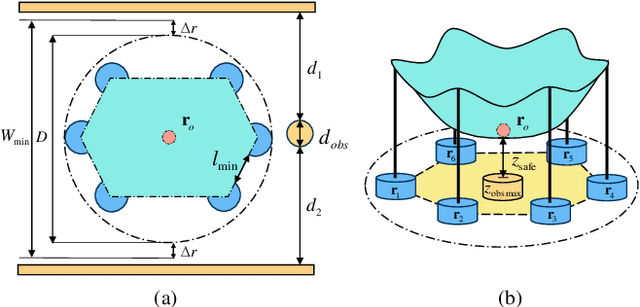
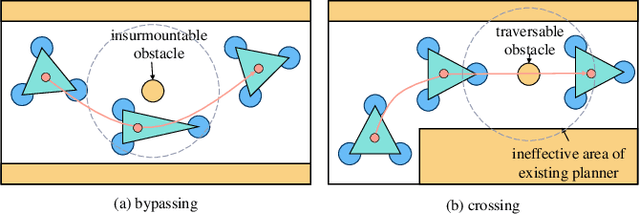
Multi-robot transportation (MRT) is to transport the object to the destination by the cooperation of multiple robots. In the process of object transportation, obstacle avoidance is an indispensable feature. In traditional local planners, obstacles are usually considered insurmountable, so the robot team bypasses the obstacles as a whole. However, many obstacles can be crossed in real situation. Studying the obstacle crossing ability of robot team can improve the efficiency of MRT and increase the planning success rate in complex environment. Inspired by the patient transfer through bed sheet, this paper focuses on the object transportation by multi-mobile robots with deformable sheet. A new local planner with obstacle crossing capability is proposed, which consists of three parts: deformable sheet modeling, formation optimization and local path generation. It can successfully find an obstacle crossing path in complex scenarios where other planners fail. The effectiveness and the versatility of the planner is verified by a case study with three mobile robots in the experiment and a simulation with four robots.