 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForward Kinematics of Object Transport by a Multi-Robot System with Deformable Sheet
Paper and Code
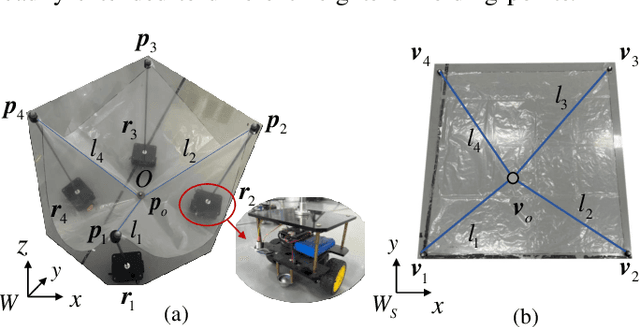
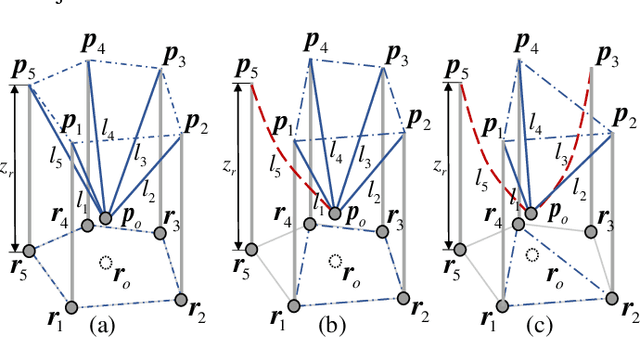
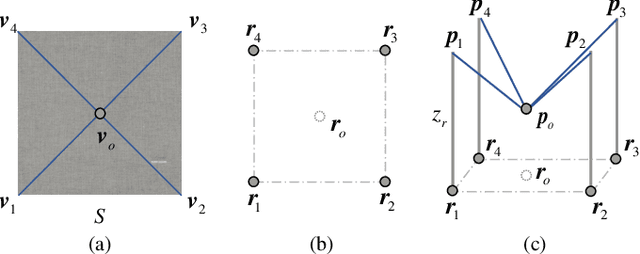
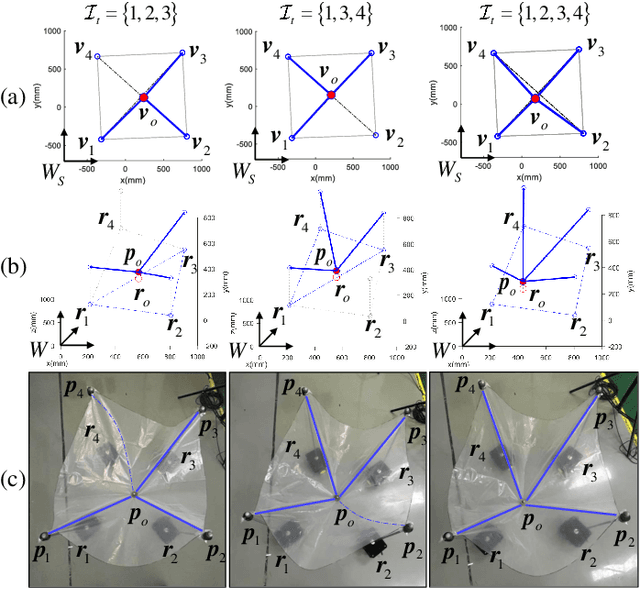
We present object handling and transport by a multi-robot team with a deformable sheet as a carrier. Due to the deformability of the sheet and the high dimension of the whole system, it is challenging to clearly describe all the possible positions of the object on the sheet for a given formation of the multi-robot system. A complete forward kinematics (FK) method is proposed in this paper for object handling by an $N$-mobile robot team with a deformable sheet. Based on the virtual variable cables model, a constrained quadratic problem (CQP) is formulated by combining the form closure and minimum potential energy conditions of the system. Analytical solutions to the CQP are presented and then further verified with the force closure condition. With the proposed FK method, all possible solutions are obtained with the given initial sheet shape and the robot team formation. We demonstrate the effectiveness, completeness, and efficiency of the FK method with simulation and experimental results.