 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Graph-based Motion Planner of Multi-Mobile Robot Systems with Formation and Obstacle Constraints
Paper and Code
Oct 07, 2022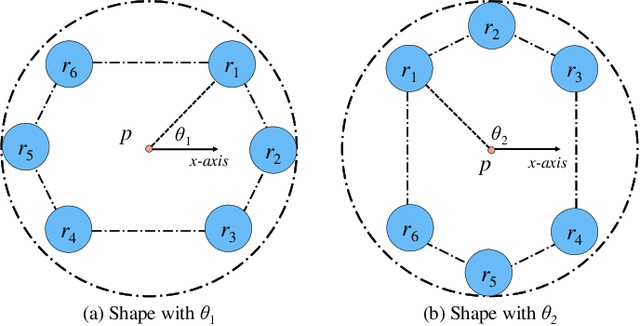

Multi-mobile robot systems show great advantages over one single robot in many applications. However, the robots are required to form desired task-specified formations, making feasible motions decrease significantly. Thus, it is challenging to determine whether the robots can pass through an obstructed environment under formation constraints, especially in an obstacle-rich environment. Furthermore, is there an optimal path for the robots? To deal with the two problems, a novel graphbased motion planner is proposed in this paper. A mapping between workspace and configuration space of multi-mobile robot systems is first built, where valid configurations can be acquired to satisfy both formation constraints and collision avoidance. Then, an undirected graph is generated by verifying connectivity between valid configurations. The breadth-first search method is employed to answer the question of whether there is a feasible path on the graph. Finally, an optimal path will be planned on the updated graph, considering the cost of path length and formation preference. Simulation results show that the planner can be applied to get optimal motions of robots under formation constraints in obstacle-rich environments. Additionally, different constraints are considered.