 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAST-MoE-RL: A Regime-Aware Spatio-Temporal MoE Framework for Deep Reinforcement Learning in Ride-Hailing
Dec 13, 2025Ride-hailing platforms face the challenge of balancing passenger waiting times with overall system efficiency under highly uncertain supply-demand conditions. Adaptive delayed matching creates a trade-off between matching and pickup delays by deciding whether to assign drivers immediately or batch requests. Since outcomes accumulate over long horizons with stochastic dynamics, reinforcement learning (RL) is a suitable framework. However, existing approaches often oversimplify traffic dynamics or use shallow encoders that miss complex spatiotemporal patterns. We introduce the Regime-Aware Spatio-Temporal Mixture-of-Experts (RAST-MoE), which formalizes adaptive delayed matching as a regime-aware MDP equipped with a self-attention MoE encoder. Unlike monolithic networks, our experts specialize automatically, improving representation capacity while maintaining computational efficiency. A physics-informed congestion surrogate preserves realistic density-speed feedback, enabling millions of efficient rollouts, while an adaptive reward scheme guards against pathological strategies. With only 12M parameters, our framework outperforms strong baselines. On real-world Uber trajectory data (San Francisco), it improves total reward by over 13%, reducing average matching and pickup delays by 10% and 15% respectively. It demonstrates robustness across unseen demand regimes and stable training. These findings highlight the potential of MoE-enhanced RL for large-scale decision-making with complex spatiotemporal dynamics.
Position: Simulating Society Requires Simulating Thought
Jun 08, 2025Simulating society with large language models (LLMs), we argue, requires more than generating plausible behavior -- it demands cognitively grounded reasoning that is structured, revisable, and traceable. LLM-based agents are increasingly used to emulate individual and group behavior -- primarily through prompting and supervised fine-tuning. Yet they often lack internal coherence, causal reasoning, and belief traceability -- making them unreliable for analyzing how people reason, deliberate, or respond to interventions. To address this, we present a conceptual modeling paradigm, Generative Minds (GenMinds), which draws from cognitive science to support structured belief representations in generative agents. To evaluate such agents, we introduce the RECAP (REconstructing CAusal Paths) framework, a benchmark designed to assess reasoning fidelity via causal traceability, demographic grounding, and intervention consistency. These contributions advance a broader shift: from surface-level mimicry to generative agents that simulate thought -- not just language -- for social simulations.
4D-ACFNet: A 4D Attention Mechanism-Based Prognostic Framework for Colorectal Cancer Liver Metastasis Integrating Multimodal Spatiotemporal Features
Mar 12, 2025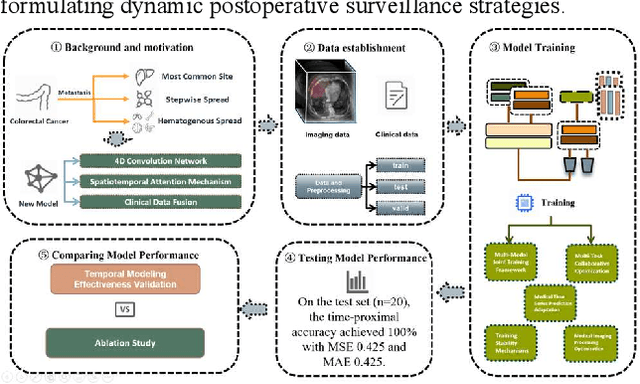

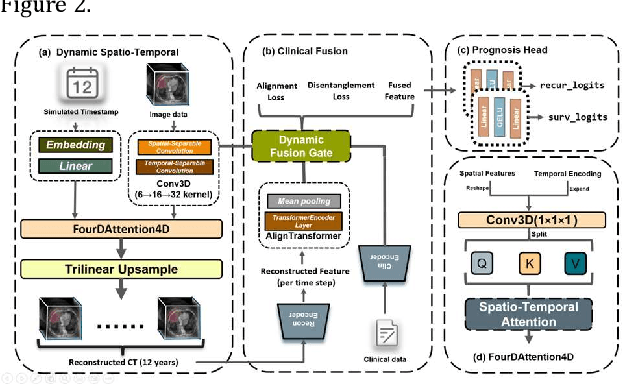

Postoperative prognostic prediction for colorectal cancer liver metastasis (CRLM) remains challenging due to tumor heterogeneity, dynamic evolution of the hepatic microenvironment, and insufficient multimodal data fusion. To address these issues, we propose 4D-ACFNet, the first framework that synergistically integrates lightweight spatiotemporal modeling, cross-modal dynamic calibration, and personalized temporal prediction within a unified architecture. Specifically, it incorporates a novel 4D spatiotemporal attention mechanism, which employs spatiotemporal separable convolution (reducing parameter count by 41%) and virtual timestamp encoding to model the interannual evolution patterns of postoperative dynamic processes, such as liver regeneration and steatosis. For cross-modal feature alignment, Transformer layers are integrated to jointly optimize modality alignment loss and disentanglement loss, effectively suppressing scale mismatch and redundant interference in clinical-imaging data. Additionally, we design a dynamic prognostic decision module that generates personalized interannual recurrence risk heatmaps through temporal upsampling and a gated classification head, overcoming the limitations of traditional methods in temporal dynamic modeling and cross-modal alignment. Experiments on 197 CRLM patients demonstrate that the model achieves 100% temporal adjacency accuracy (TAA), with performance significantly surpassing existing approaches. This study establishes the first spatiotemporal modeling paradigm for postoperative dynamic monitoring of CRLM. The proposed framework can be extended to prognostic analysis of multi-cancer metastases, advancing precision surgery from "spatial resection" to "spatiotemporal cure."
RURANET++: An Unsupervised Learning Method for Diabetic Macular Edema Based on SCSE Attention Mechanisms and Dynamic Multi-Projection Head Clustering
Feb 27, 2025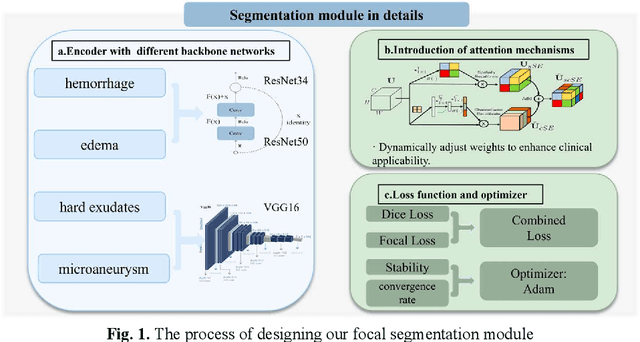
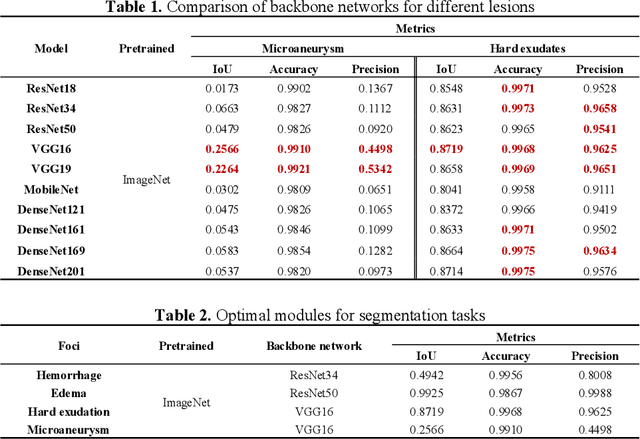
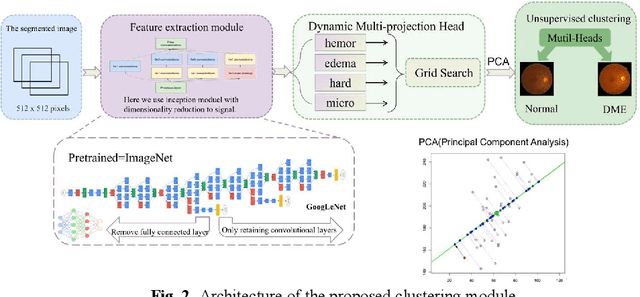
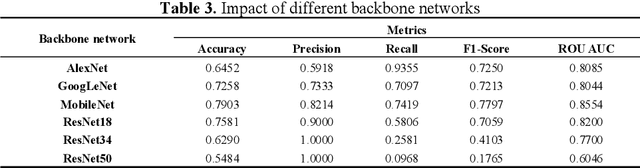
Diabetic Macular Edema (DME), a prevalent complication among diabetic patients, constitutes a major cause of visual impairment and blindness. Although deep learning has achieved remarkable progress in medical image analysis, traditional DME diagnosis still relies on extensive annotated data and subjective ophthalmologist assessments, limiting practical applications. To address this, we present RURANET++, an unsupervised learning-based automated DME diagnostic system. This framework incorporates an optimized U-Net architecture with embedded Spatial and Channel Squeeze & Excitation (SCSE) attention mechanisms to enhance lesion feature extraction. During feature processing, a pre-trained GoogLeNet model extracts deep features from retinal images, followed by PCA-based dimensionality reduction to 50 dimensions for computational efficiency. Notably, we introduce a novel clustering algorithm employing multi-projection heads to explicitly control cluster diversity while dynamically adjusting similarity thresholds, thereby optimizing intra-class consistency and inter-class discrimination. Experimental results demonstrate superior performance across multiple metrics, achieving maximum accuracy (0.8411), precision (0.8593), recall (0.8411), and F1-score (0.8390), with exceptional clustering quality. This work provides an efficient unsupervised solution for DME diagnosis with significant clinical implications.
RetinaRegen: A Hybrid Model for Readability and Detail Restoration in Fundus Images
Feb 26, 2025



Fundus image quality is crucial for diagnosing eye diseases, but real-world conditions often result in blurred or unreadable images, increasing diagnostic uncertainty. To address these challenges, this study proposes RetinaRegen, a hybrid model for retinal image restoration that integrates a readability classifi-cation model, a Diffusion Model, and a Variational Autoencoder (VAE). Ex-periments on the SynFundus-1M dataset show that the proposed method achieves a PSNR of 27.4521, an SSIM of 0.9556, and an LPIPS of 0.1911 for the readability labels of the optic disc (RO) region. These results demonstrate superior performance in restoring key regions, offering an effective solution to enhance fundus image quality and support clinical diagnosis.
Multilevel Interpretability Of Artificial Neural Networks: Leveraging Framework And Methods From Neuroscience
Aug 26, 2024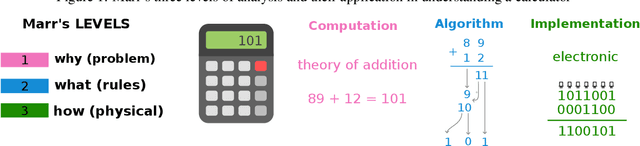
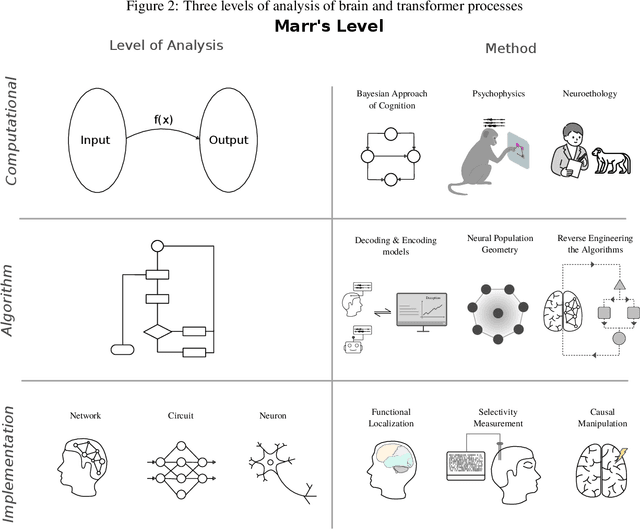
As deep learning systems are scaled up to many billions of parameters, relating their internal structure to external behaviors becomes very challenging. Although daunting, this problem is not new: Neuroscientists and cognitive scientists have accumulated decades of experience analyzing a particularly complex system - the brain. In this work, we argue that interpreting both biological and artificial neural systems requires analyzing those systems at multiple levels of analysis, with different analytic tools for each level. We first lay out a joint grand challenge among scientists who study the brain and who study artificial neural networks: understanding how distributed neural mechanisms give rise to complex cognition and behavior. We then present a series of analytical tools that can be used to analyze biological and artificial neural systems, organizing those tools according to Marr's three levels of analysis: computation/behavior, algorithm/representation, and implementation. Overall, the multilevel interpretability framework provides a principled way to tackle neural system complexity; links structure, computation, and behavior; clarifies assumptions and research priorities at each level; and paves the way toward a unified effort for understanding intelligent systems, may they be biological or artificial.
Peak-Controlled Logits Poisoning Attack in Federated Distillation
Jul 25, 2024Federated Distillation (FD) offers an innovative approach to distributed machine learning, leveraging knowledge distillation for efficient and flexible cross-device knowledge transfer without necessitating the upload of extensive model parameters to a central server. While FD has gained popularity, its vulnerability to poisoning attacks remains underexplored. To address this gap, we previously introduced FDLA (Federated Distillation Logits Attack), a method that manipulates logits communication to mislead and degrade the performance of client models. However, the impact of FDLA on participants with different identities and the effects of malicious modifications at various stages of knowledge transfer remain unexplored. To this end, we present PCFDLA (Peak-Controlled Federated Distillation Logits Attack), an advanced and more stealthy logits poisoning attack method for FD. PCFDLA enhances the effectiveness of FDLA by carefully controlling the peak values of logits to create highly misleading yet inconspicuous modifications. Furthermore, we introduce a novel metric for better evaluating attack efficacy, demonstrating that PCFDLA maintains stealth while being significantly more disruptive to victim models compared to its predecessors. Experimental results across various datasets confirm the superior impact of PCFDLA on model accuracy, solidifying its potential threat in federated distillation systems.
Efficient Mitigation of Bus Bunching through Setter-Based Curriculum Learning
May 23, 2024Curriculum learning has been growing in the domain of reinforcement learning as a method of improving training efficiency for various tasks. It involves modifying the difficulty (lessons) of the environment as the agent learns, in order to encourage more optimal agent behavior and higher reward states. However, most curriculum learning methods currently involve discrete transitions of the curriculum or predefined steps by the programmer or using automatic curriculum learning on only a small subset training such as only on an adversary. In this paper, we propose a novel approach to curriculum learning that uses a Setter Model to automatically generate an action space, adversary strength, initialization, and bunching strength. Transportation and traffic optimization is a well known area of study, especially for reinforcement learning based solutions. We specifically look at the bus bunching problem for the context of this study. The main idea of the problem is to minimize the delays caused by inefficient bus timings for passengers arriving and departing from a system of buses. While the heavy exploration in the area makes innovation and improvement with regards to performance marginal, it simultaneously provides an effective baseline for developing new generalized techniques. Our group is particularly interested in examining curriculum learning and its effect on training efficiency and overall performance. We decide to try a lesser known approach to curriculum learning, in which the curriculum is not fixed or discretely thresholded. Our method for automated curriculum learning involves a curriculum that is dynamically chosen and learned by an adversary network made to increase the difficulty of the agent's training, and defined by multiple forms of input. Our results are shown in the following sections of this paper.
Logits Poisoning Attack in Federated Distillation
Jan 08, 2024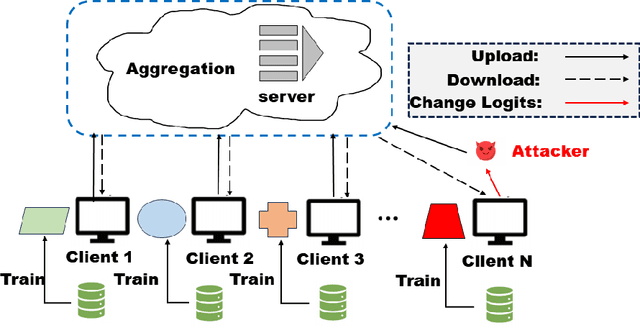
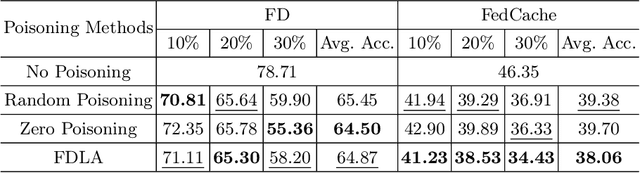
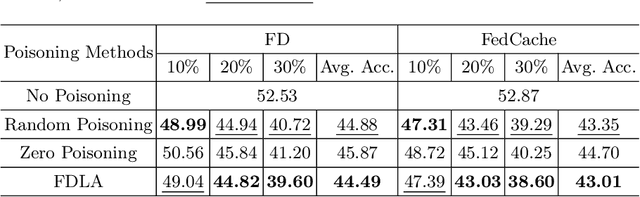
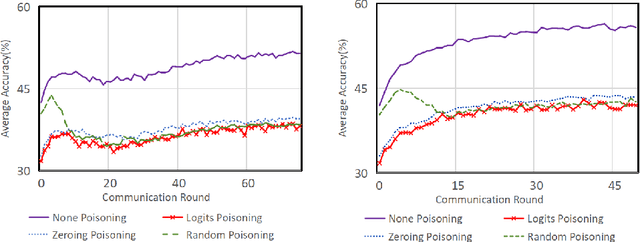
Federated Distillation (FD) is a novel and promising distributed machine learning paradigm, where knowledge distillation is leveraged to facilitate a more efficient and flexible cross-device knowledge transfer in federated learning. By optimizing local models with knowledge distillation, FD circumvents the necessity of uploading large-scale model parameters to the central server, simultaneously preserving the raw data on local clients. Despite the growing popularity of FD, there is a noticeable gap in previous works concerning the exploration of poisoning attacks within this framework. This can lead to a scant understanding of the vulnerabilities to potential adversarial actions. To this end, we introduce FDLA, a poisoning attack method tailored for FD. FDLA manipulates logit communications in FD, aiming to significantly degrade model performance on clients through misleading the discrimination of private samples. Through extensive simulation experiments across a variety of datasets, attack scenarios, and FD configurations, we demonstrate that LPA effectively compromises client model accuracy, outperforming established baseline algorithms in this regard. Our findings underscore the critical need for robust defense mechanisms in FD settings to mitigate such adversarial threats.
Simulating the Integration of Urban Air Mobility into Existing Transportation Systems: A Survey
Jan 25, 2023



Urban air mobility (UAM) has the potential to revolutionize transportation in metropolitan areas, providing a new mode of transportation that could alleviate congestion and improve accessibility. However, the integration of UAM into existing transportation systems is a complex task that requires a thorough understanding of its impact on traffic flow and capacity. In this paper, we conduct a survey to investigate the current state of research on UAM in metropolitan-scale traffic using simulation techniques. We identify key challenges and opportunities for the integration of UAM into urban transportation systems, including impacts on existing traffic patterns and congestion; safety analysis and risk assessment; potential economic and environmental benefits; and the development of shared infrastructure and routes for UAM and ground-based transportation. We also discuss the potential benefits of UAM, such as reduced travel times and improved accessibility for underserved areas. Our survey provides a comprehensive overview of the current state of research on UAM in metropolitan-scale traffic using simulation and highlights key areas for future research and development.