 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLess is MoE: Trimming Experts in Domain-Specialist Language Models
Jun 04, 2026Mixture-of-Experts (MoE) models achieve strong performance through conditional computation, but their large parameter footprint poses deployment challenges. Prior MoE compression approaches catastrophically fail when evaluated on general-purpose benchmarks beyond commonsense reasoning. We trace this failure to the granularity of compression: important capabilities are distributed across experts but concentrated in FFN sparse intermediate dimensions. To identify these dimensions, we use Fisher importance which outperforms activation-, router-score-, and magnitude-based alternatives, and identifies tiny sets of task-critical dimensions: in Qwen1.5-MoE, removing as few as 12 of 1.35M routed-FFN intermediate dimensions collapses GSM8K accuracy while largely preserving factual-knowledge performance. Building on this, we propose Fisher-MoE, which operates within FFN to remove intermediate dimensions ranked by Fisher importance. At the same 50% MoE compression ratio, Fisher-MoE preserves model capability, while reducing weight memory by ~45% and improving inference throughput by 21%. These findings suggest intermediate dimension granularity is an effective unit for both compression and ranking where capability concentrates in MoE models.
Preserving Long-Tailed Expert Information in Mixture-of-Experts Tuning
Apr 24, 2026Despite MoE models leading many benchmarks, supervised fine-tuning (SFT) for the MoE architectures remains difficult because its router layers are fragile. Methods such as DenseMixer and ESFT mitigate router collapse with dense mixing or auxiliary load-balancing losses, but these introduce noisy gradients that often degrade performance. In preliminary experiments, we systematically pruned experts and observed that while certain super experts are activated far more frequently, discarding less used experts still leads to notable performance degradation. This suggests that even rarely activated experts encode non-trivial knowledge useful for downstream tasks. Motivated by this, we propose an auxiliary-loss-free MoE SFT framework that combines bias-driven sparsification with always-active gated condenser experts. Rather than enforcing balanced activation across all experts, our method encourages task-relevant experts to remain active while pushing long-tailed experts toward inactivity. The condenser experts provide a persistent, learnable pathway that alleviates gradient starvation and facilitates consolidation of information that would otherwise remain fragmented across sparsely activated experts. Analysis further suggest that this design better preserves long-tailed expert information under sparse routing. Experiments on large-scale MoE models demonstrate that our approach outperforms state-of-the-art SFT baselines such as DenseMixer and ESFT, achieving average gain of 2.5%+ on both mathematical reasoning and commonsenseQA benchmarks.
CORAL: Towards Autonomous Multi-Agent Evolution for Open-Ended Discovery
Apr 02, 2026Large language model (LLM)-based evolution is a promising approach for open-ended discovery, where progress requires sustained search and knowledge accumulation. Existing methods still rely heavily on fixed heuristics and hard-coded exploration rules, which limit the autonomy of LLM agents. We present CORAL, the first framework for autonomous multi-agent evolution on open-ended problems. CORAL replaces rigid control with long-running agents that explore, reflect, and collaborate through shared persistent memory, asynchronous multi-agent execution, and heartbeat-based interventions. It also provides practical safeguards, including isolated workspaces, evaluator separation, resource management, and agent session and health management. Evaluated on diverse mathematical, algorithmic, and systems optimization tasks, CORAL sets new state-of-the-art results on 10 tasks, achieving 3-10 times higher improvement rates with far fewer evaluations than fixed evolutionary search baselines across tasks. On Anthropic's kernel engineering task, four co-evolving agents improve the best known score from 1363 to 1103 cycles. Mechanistic analyses further show how these gains arise from knowledge reuse and multi-agent exploration and communication. Together, these results suggest that greater agent autonomy and multi-agent evolution can substantially improve open-ended discovery. Code is available at https://github.com/Human-Agent-Society/CORAL.
RAST-MoE-RL: A Regime-Aware Spatio-Temporal MoE Framework for Deep Reinforcement Learning in Ride-Hailing
Dec 13, 2025Ride-hailing platforms face the challenge of balancing passenger waiting times with overall system efficiency under highly uncertain supply-demand conditions. Adaptive delayed matching creates a trade-off between matching and pickup delays by deciding whether to assign drivers immediately or batch requests. Since outcomes accumulate over long horizons with stochastic dynamics, reinforcement learning (RL) is a suitable framework. However, existing approaches often oversimplify traffic dynamics or use shallow encoders that miss complex spatiotemporal patterns. We introduce the Regime-Aware Spatio-Temporal Mixture-of-Experts (RAST-MoE), which formalizes adaptive delayed matching as a regime-aware MDP equipped with a self-attention MoE encoder. Unlike monolithic networks, our experts specialize automatically, improving representation capacity while maintaining computational efficiency. A physics-informed congestion surrogate preserves realistic density-speed feedback, enabling millions of efficient rollouts, while an adaptive reward scheme guards against pathological strategies. With only 12M parameters, our framework outperforms strong baselines. On real-world Uber trajectory data (San Francisco), it improves total reward by over 13%, reducing average matching and pickup delays by 10% and 15% respectively. It demonstrates robustness across unseen demand regimes and stable training. These findings highlight the potential of MoE-enhanced RL for large-scale decision-making with complex spatiotemporal dynamics.
Sparse Matrix in Large Language Model Fine-tuning
May 30, 2024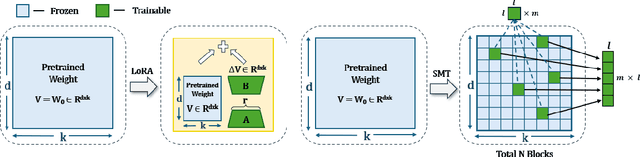



LoRA and its variants have become popular parameter-efficient fine-tuning (PEFT) methods due to their ability to avoid excessive computational costs. However, an accuracy gap often exists between PEFT methods and full fine-tuning (FT), and this gap has yet to be systematically studied. In this work, we introduce a method for selecting sparse sub-matrices that aim to minimize the performance gap between PEFT vs. full fine-tuning (FT) while also reducing both fine-tuning computational cost and memory cost. Our Sparse Matrix Tuning (SMT) method begins by identifying the most significant sub-matrices in the gradient update, updating only these blocks during the fine-tuning process. In our experiments, we demonstrate that SMT consistently surpasses other PEFT baseline (e.g. LoRA and DoRA) in fine-tuning popular large language models such as LLaMA across a broad spectrum of tasks, while reducing the GPU memory footprint by 67% compared to FT. We also examine how the performance of LoRA and DoRA tends to plateau and decline as the number of trainable parameters increases, in contrast, our SMT method does not suffer from such issue.
Simulating the Integration of Urban Air Mobility into Existing Transportation Systems: A Survey
Jan 25, 2023



Urban air mobility (UAM) has the potential to revolutionize transportation in metropolitan areas, providing a new mode of transportation that could alleviate congestion and improve accessibility. However, the integration of UAM into existing transportation systems is a complex task that requires a thorough understanding of its impact on traffic flow and capacity. In this paper, we conduct a survey to investigate the current state of research on UAM in metropolitan-scale traffic using simulation techniques. We identify key challenges and opportunities for the integration of UAM into urban transportation systems, including impacts on existing traffic patterns and congestion; safety analysis and risk assessment; potential economic and environmental benefits; and the development of shared infrastructure and routes for UAM and ground-based transportation. We also discuss the potential benefits of UAM, such as reduced travel times and improved accessibility for underserved areas. Our survey provides a comprehensive overview of the current state of research on UAM in metropolitan-scale traffic using simulation and highlights key areas for future research and development.
SuperFusion: Multilevel LiDAR-Camera Fusion for Long-Range HD Map Generation and Prediction
Nov 28, 2022

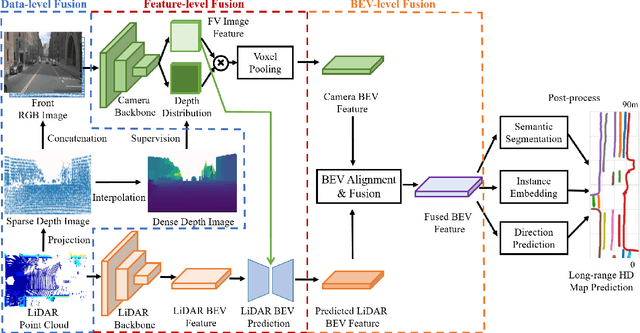

High-definition (HD) semantic map generation of the environment is an essential component of autonomous driving. Existing methods have achieved good performance in this task by fusing different sensor modalities, such as LiDAR and camera. However, current works are based on raw data or network feature-level fusion and only consider short-range HD map generation, limiting their deployment to realistic autonomous driving applications. In this paper, we focus on the task of building the HD maps in both short ranges, i.e., within 30 m, and also predicting long-range HD maps up to 90 m, which is required by downstream path planning and control tasks to improve the smoothness and safety of autonomous driving. To this end, we propose a novel network named SuperFusion, exploiting the fusion of LiDAR and camera data at multiple levels. We benchmark our SuperFusion on the nuScenes dataset and a self-recorded dataset and show that it outperforms the state-of-the-art baseline methods with large margins. Furthermore, we propose a new metric to evaluate the long-range HD map prediction and apply the generated HD map to a downstream path planning task. The results show that by using the long-range HD maps predicted by our method, we can make better path planning for autonomous vehicles. The code will be available at https://github.com/haomo-ai/SuperFusion.
Making sense of electrical vehicle discussions using sentiment analysis on closely related news and user comments
Jan 14, 2022
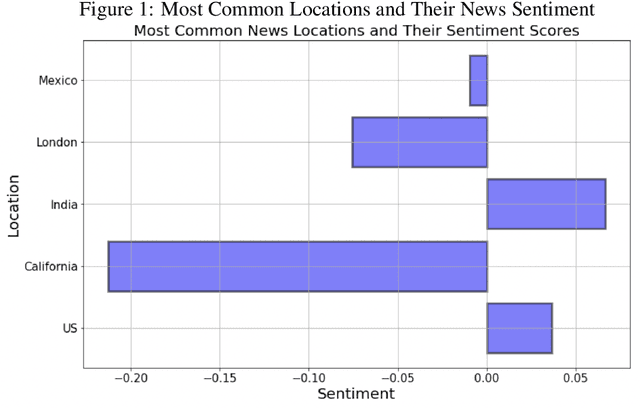
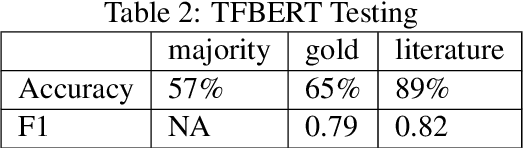
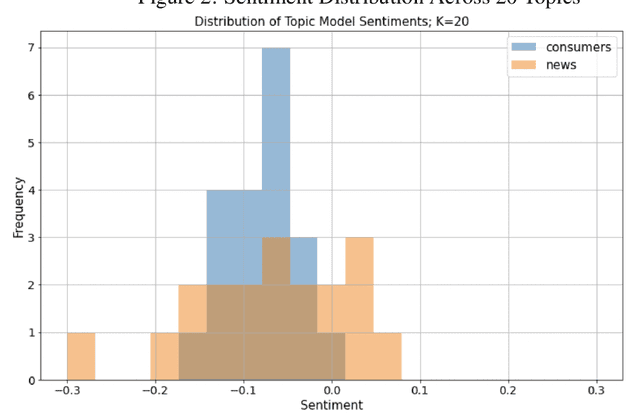
We used a token-wise and document-wise sentiment analysis using both unsupervised and supervised models applied to both news and user reviews dataset. And our token-wise sentiment analysis found a statistically significant difference in sentiment between the two groups (both of which were very large N), our document-wise supervised sentiment analysis found no significant difference in sentiment.
An Automated Machine Learning (AutoML) Method for Driving Distraction Detection Based on Lane-Keeping Performance
Mar 10, 2021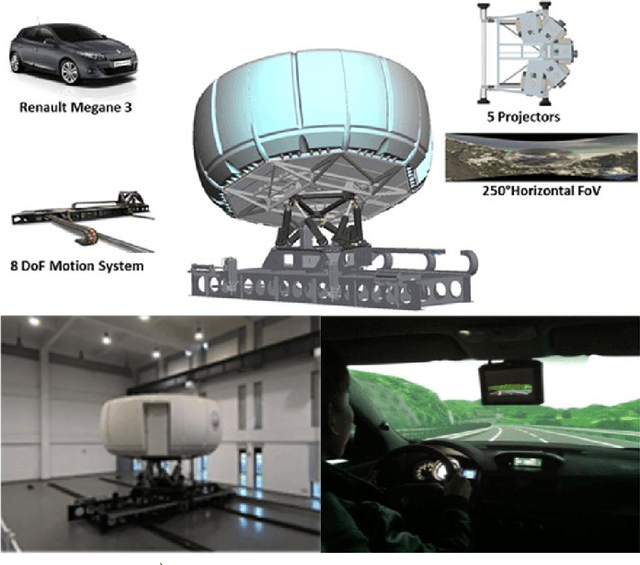
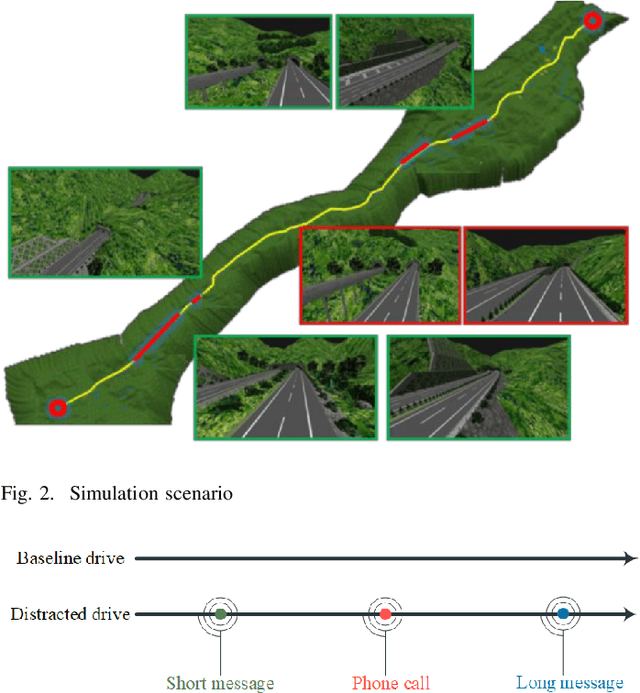
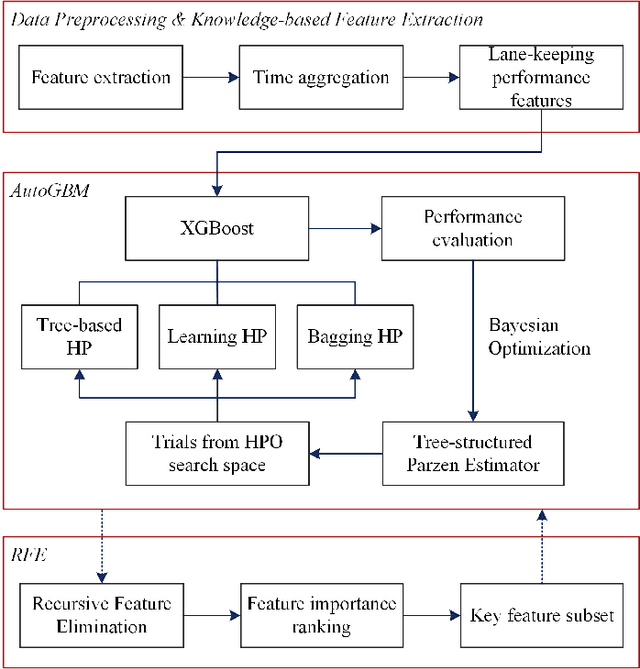
With the enrichment of smartphones, driving distractions caused by phone usages have become a threat to driving safety. A promising way to mitigate driving distractions is to detect them and give real-time safety warnings. However, existing detection algorithms face two major challenges, low user acceptance caused by in-vehicle camera sensors, and uncertain accuracy of pre-trained models due to drivers individual differences. Therefore, this study proposes a domain-specific automated machine learning (AutoML) to self-learn the optimal models to detect distraction based on lane-keeping performance data. The AutoML integrates the key modeling steps into an auto-optimizable pipeline, including knowledge-based feature extraction, feature selection by recursive feature elimination (RFE), algorithm selection, and hyperparameter auto-tuning by Bayesian optimization. An AutoML method based on XGBoost, termed AutoGBM, is built as the classifier for prediction and feature ranking. The model is tested based on driving simulator experiments of three driving distractions caused by phone usage: browsing short messages, browsing long messages, and answering a phone call. The proposed AutoGBM method is found to be reliable and promising to predict phone-related driving distractions, which achieves satisfactory results prediction, with a predictive power of 80\% on group level and 90\% on individual level accuracy. Moreover, the results also evoke the fact that each distraction types and drivers require different optimized hyperparameters values, which reconfirm the necessity of utilizing AutoML to detect driving distractions. The purposed AutoGBM not only produces better performance with fewer features; but also provides data-driven insights about system design.