 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating the Integration of Urban Air Mobility into Existing Transportation Systems: A Survey
Jan 25, 2023



Urban air mobility (UAM) has the potential to revolutionize transportation in metropolitan areas, providing a new mode of transportation that could alleviate congestion and improve accessibility. However, the integration of UAM into existing transportation systems is a complex task that requires a thorough understanding of its impact on traffic flow and capacity. In this paper, we conduct a survey to investigate the current state of research on UAM in metropolitan-scale traffic using simulation techniques. We identify key challenges and opportunities for the integration of UAM into urban transportation systems, including impacts on existing traffic patterns and congestion; safety analysis and risk assessment; potential economic and environmental benefits; and the development of shared infrastructure and routes for UAM and ground-based transportation. We also discuss the potential benefits of UAM, such as reduced travel times and improved accessibility for underserved areas. Our survey provides a comprehensive overview of the current state of research on UAM in metropolitan-scale traffic using simulation and highlights key areas for future research and development.
Collaborative High Accuracy Localization in Mobile Multipath Environments
Nov 08, 2012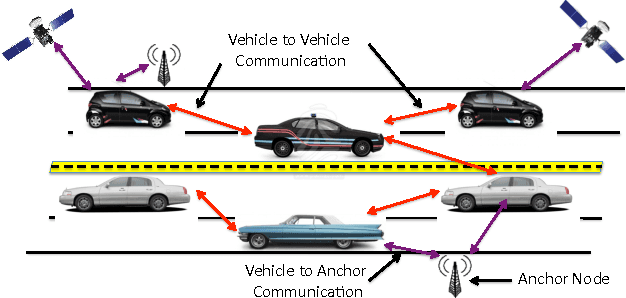
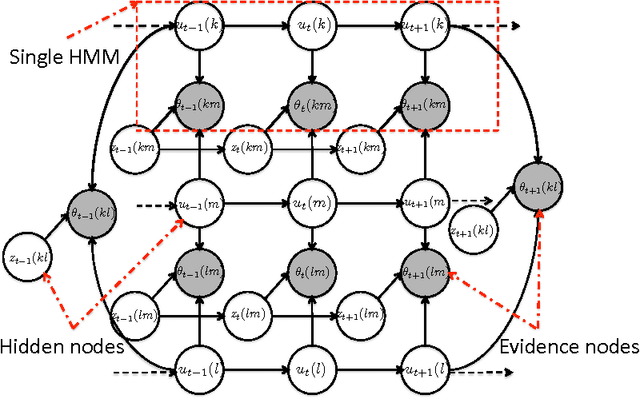
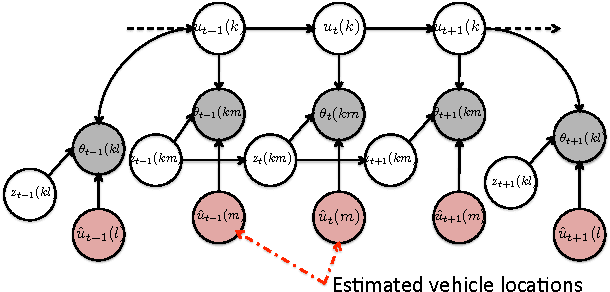
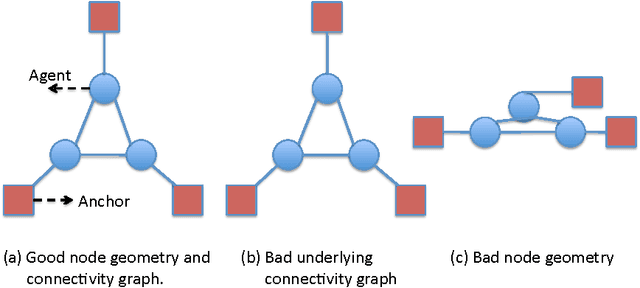
We study the problem of high accuracy localization of mobile nodes in a multipath-rich environment where sub-meter accuracies are required. We employ a peer-to-peer framework where the vehicles/nodes can get pairwise multipath-degraded ranging estimates in local neighborhoods together with a fixed number of anchor nodes. The challenge is to overcome the multipath-barrier with redundancy in order to provide the desired accuracies especially under severe multipath conditions when the fraction of received signals corrupted by multipath is dominating. We invoke a analytical graphical model framework based on particle filtering and reveal its high accuracy localization promise through simulations. We also address design questions such as "How many anchors and what fraction of line-of-sight (LOS) measurements are needed to achieve a specified target accuracy?", by analytically characterizing the performance improvement in localization accuracy as a function of the number of nodes in the network and the fraction of LOS measurements. In particular, for a static node placement, we show that the Cramer-Rao Lower Bound (CRLB), a fundamental lower bound on the localization accuracy, can be expressed as a product of two factors - a scalar function that depends only on the parameters of the noise distribution and a matrix that depends only on the geometry of node locations and the underlying connectivity graph. Further, a simplified expression is obtained for the CRLB that helps deduce the scaling behavior of the estimation error as a function of the number of agents and anchors in the network. The bound suggests that even a small fraction of LOS measurements can provide significant improvements. Conversely, a small fraction of NLOS measurements can significantly degrade the performance. The analysis is extended to the mobile setting and the performance is compared with the derived CRLB.