 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChronoEdit: Towards Temporal Reasoning for Image Editing and World Simulation
Oct 05, 2025Recent advances in large generative models have significantly advanced image editing and in-context image generation, yet a critical gap remains in ensuring physical consistency, where edited objects must remain coherent. This capability is especially vital for world simulation related tasks. In this paper, we present ChronoEdit, a framework that reframes image editing as a video generation problem. First, ChronoEdit treats the input and edited images as the first and last frames of a video, allowing it to leverage large pretrained video generative models that capture not only object appearance but also the implicit physics of motion and interaction through learned temporal consistency. Second, ChronoEdit introduces a temporal reasoning stage that explicitly performs editing at inference time. Under this setting, the target frame is jointly denoised with reasoning tokens to imagine a plausible editing trajectory that constrains the solution space to physically viable transformations. The reasoning tokens are then dropped after a few steps to avoid the high computational cost of rendering a full video. To validate ChronoEdit, we introduce PBench-Edit, a new benchmark of image-prompt pairs for contexts that require physical consistency, and demonstrate that ChronoEdit surpasses state-of-the-art baselines in both visual fidelity and physical plausibility. Code and models for both the 14B and 2B variants of ChronoEdit will be released on the project page: https://research.nvidia.com/labs/toronto-ai/chronoedit
Cosmos-Drive-Dreams: Scalable Synthetic Driving Data Generation with World Foundation Models
Jun 11, 2025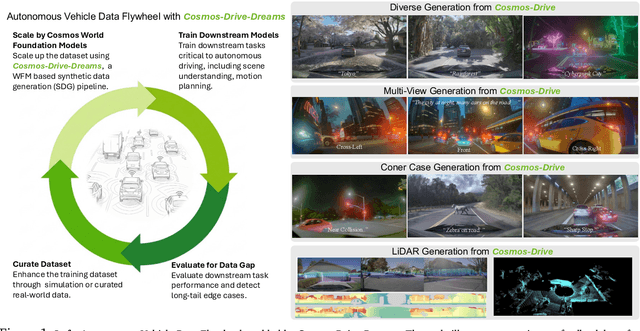
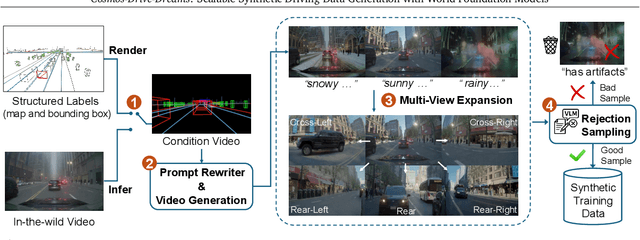
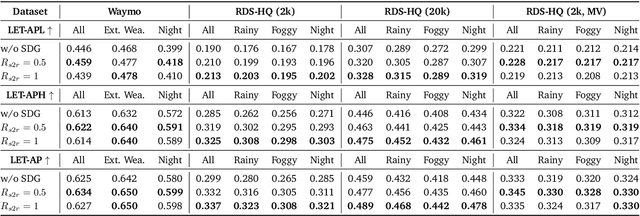
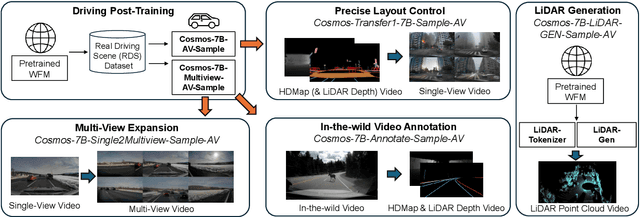
Collecting and annotating real-world data for safety-critical physical AI systems, such as Autonomous Vehicle (AV), is time-consuming and costly. It is especially challenging to capture rare edge cases, which play a critical role in training and testing of an AV system. To address this challenge, we introduce the Cosmos-Drive-Dreams - a synthetic data generation (SDG) pipeline that aims to generate challenging scenarios to facilitate downstream tasks such as perception and driving policy training. Powering this pipeline is Cosmos-Drive, a suite of models specialized from NVIDIA Cosmos world foundation model for the driving domain and are capable of controllable, high-fidelity, multi-view, and spatiotemporally consistent driving video generation. We showcase the utility of these models by applying Cosmos-Drive-Dreams to scale the quantity and diversity of driving datasets with high-fidelity and challenging scenarios. Experimentally, we demonstrate that our generated data helps in mitigating long-tail distribution problems and enhances generalization in downstream tasks such as 3D lane detection, 3D object detection and driving policy learning. We open source our pipeline toolkit, dataset and model weights through the NVIDIA's Cosmos platform. Project page: https://research.nvidia.com/labs/toronto-ai/cosmos_drive_dreams
Cosmos-Transfer1: Conditional World Generation with Adaptive Multimodal Control
Mar 18, 2025We introduce Cosmos-Transfer, a conditional world generation model that can generate world simulations based on multiple spatial control inputs of various modalities such as segmentation, depth, and edge. In the design, the spatial conditional scheme is adaptive and customizable. It allows weighting different conditional inputs differently at different spatial locations. This enables highly controllable world generation and finds use in various world-to-world transfer use cases, including Sim2Real. We conduct extensive evaluations to analyze the proposed model and demonstrate its applications for Physical AI, including robotics Sim2Real and autonomous vehicle data enrichment. We further demonstrate an inference scaling strategy to achieve real-time world generation with an NVIDIA GB200 NVL72 rack. To help accelerate research development in the field, we open-source our models and code at https://github.com/nvidia-cosmos/cosmos-transfer1.
GEN3C: 3D-Informed World-Consistent Video Generation with Precise Camera Control
Mar 05, 2025We present GEN3C, a generative video model with precise Camera Control and temporal 3D Consistency. Prior video models already generate realistic videos, but they tend to leverage little 3D information, leading to inconsistencies, such as objects popping in and out of existence. Camera control, if implemented at all, is imprecise, because camera parameters are mere inputs to the neural network which must then infer how the video depends on the camera. In contrast, GEN3C is guided by a 3D cache: point clouds obtained by predicting the pixel-wise depth of seed images or previously generated frames. When generating the next frames, GEN3C is conditioned on the 2D renderings of the 3D cache with the new camera trajectory provided by the user. Crucially, this means that GEN3C neither has to remember what it previously generated nor does it have to infer the image structure from the camera pose. The model, instead, can focus all its generative power on previously unobserved regions, as well as advancing the scene state to the next frame. Our results demonstrate more precise camera control than prior work, as well as state-of-the-art results in sparse-view novel view synthesis, even in challenging settings such as driving scenes and monocular dynamic video. Results are best viewed in videos. Check out our webpage! https://research.nvidia.com/labs/toronto-ai/GEN3C/
Difix3D+: Improving 3D Reconstructions with Single-Step Diffusion Models
Mar 03, 2025Neural Radiance Fields and 3D Gaussian Splatting have revolutionized 3D reconstruction and novel-view synthesis task. However, achieving photorealistic rendering from extreme novel viewpoints remains challenging, as artifacts persist across representations. In this work, we introduce Difix3D+, a novel pipeline designed to enhance 3D reconstruction and novel-view synthesis through single-step diffusion models. At the core of our approach is Difix, a single-step image diffusion model trained to enhance and remove artifacts in rendered novel views caused by underconstrained regions of the 3D representation. Difix serves two critical roles in our pipeline. First, it is used during the reconstruction phase to clean up pseudo-training views that are rendered from the reconstruction and then distilled back into 3D. This greatly enhances underconstrained regions and improves the overall 3D representation quality. More importantly, Difix also acts as a neural enhancer during inference, effectively removing residual artifacts arising from imperfect 3D supervision and the limited capacity of current reconstruction models. Difix3D+ is a general solution, a single model compatible with both NeRF and 3DGS representations, and it achieves an average 2$\times$ improvement in FID score over baselines while maintaining 3D consistency.
InfiniCube: Unbounded and Controllable Dynamic 3D Driving Scene Generation with World-Guided Video Models
Dec 05, 2024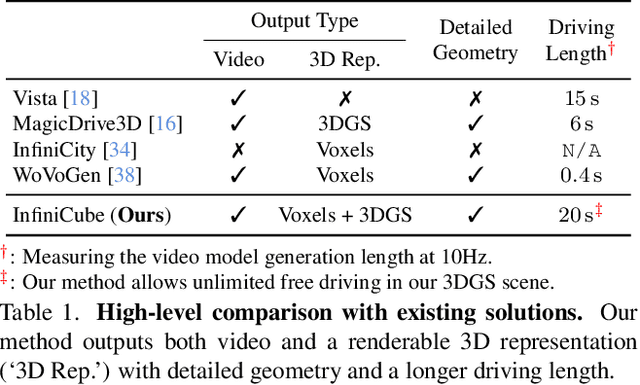
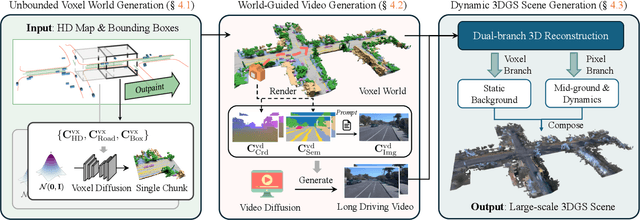
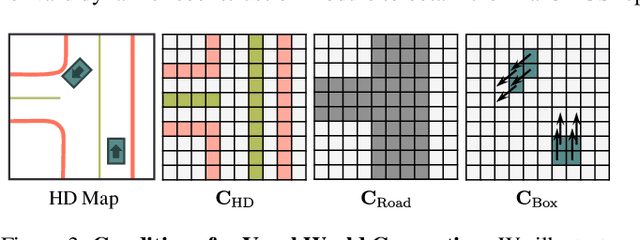
We present InfiniCube, a scalable method for generating unbounded dynamic 3D driving scenes with high fidelity and controllability. Previous methods for scene generation either suffer from limited scales or lack geometric and appearance consistency along generated sequences. In contrast, we leverage the recent advancements in scalable 3D representation and video models to achieve large dynamic scene generation that allows flexible controls through HD maps, vehicle bounding boxes, and text descriptions. First, we construct a map-conditioned sparse-voxel-based 3D generative model to unleash its power for unbounded voxel world generation. Then, we re-purpose a video model and ground it on the voxel world through a set of carefully designed pixel-aligned guidance buffers, synthesizing a consistent appearance. Finally, we propose a fast feed-forward approach that employs both voxel and pixel branches to lift the dynamic videos to dynamic 3D Gaussians with controllable objects. Our method can generate controllable and realistic 3D driving scenes, and extensive experiments validate the effectiveness and superiority of our model.
SCube: Instant Large-Scale Scene Reconstruction using VoxSplats
Oct 26, 2024



We present SCube, a novel method for reconstructing large-scale 3D scenes (geometry, appearance, and semantics) from a sparse set of posed images. Our method encodes reconstructed scenes using a novel representation VoxSplat, which is a set of 3D Gaussians supported on a high-resolution sparse-voxel scaffold. To reconstruct a VoxSplat from images, we employ a hierarchical voxel latent diffusion model conditioned on the input images followed by a feedforward appearance prediction model. The diffusion model generates high-resolution grids progressively in a coarse-to-fine manner, and the appearance network predicts a set of Gaussians within each voxel. From as few as 3 non-overlapping input images, SCube can generate millions of Gaussians with a 1024^3 voxel grid spanning hundreds of meters in 20 seconds. Past works tackling scene reconstruction from images either rely on per-scene optimization and fail to reconstruct the scene away from input views (thus requiring dense view coverage as input) or leverage geometric priors based on low-resolution models, which produce blurry results. In contrast, SCube leverages high-resolution sparse networks and produces sharp outputs from few views. We show the superiority of SCube compared to prior art using the Waymo self-driving dataset on 3D reconstruction and demonstrate its applications, such as LiDAR simulation and text-to-scene generation.
fVDB: A Deep-Learning Framework for Sparse, Large-Scale, and High-Performance Spatial Intelligence
Jul 01, 2024



We present fVDB, a novel GPU-optimized framework for deep learning on large-scale 3D data. fVDB provides a complete set of differentiable primitives to build deep learning architectures for common tasks in 3D learning such as convolution, pooling, attention, ray-tracing, meshing, etc. fVDB simultaneously provides a much larger feature set (primitives and operators) than established frameworks with no loss in efficiency: our operators match or exceed the performance of other frameworks with narrower scope. Furthermore, fVDB can process datasets with much larger footprint and spatial resolution than prior works, while providing a competitive memory footprint on small inputs. To achieve this combination of versatility and performance, fVDB relies on a single novel VDB index grid acceleration structure paired with several key innovations including GPU accelerated sparse grid construction, convolution using tensorcores, fast ray tracing kernels using a Hierarchical Digital Differential Analyzer algorithm (HDDA), and jagged tensors. Our framework is fully integrated with PyTorch enabling interoperability with existing pipelines, and we demonstrate its effectiveness on a number of representative tasks such as large-scale point-cloud segmentation, high resolution 3D generative modeling, unbounded scale Neural Radiance Fields, and large-scale point cloud reconstruction.
XCube ($\mathcal{X}^3$): Large-Scale 3D Generative Modeling using Sparse Voxel Hierarchies
Dec 06, 2023We present $\mathcal{X}^3$ (pronounced XCube), a novel generative model for high-resolution sparse 3D voxel grids with arbitrary attributes. Our model can generate millions of voxels with a finest effective resolution of up to $1024^3$ in a feed-forward fashion without time-consuming test-time optimization. To achieve this, we employ a hierarchical voxel latent diffusion model which generates progressively higher resolution grids in a coarse-to-fine manner using a custom framework built on the highly efficient VDB data structure. Apart from generating high-resolution objects, we demonstrate the effectiveness of XCube on large outdoor scenes at scales of 100m$\times$100m with a voxel size as small as 10cm. We observe clear qualitative and quantitative improvements over past approaches. In addition to unconditional generation, we show that our model can be used to solve a variety of tasks such as user-guided editing, scene completion from a single scan, and text-to-3D. More results and details can be found at https://research.nvidia.com/labs/toronto-ai/xcube/.
Blind Video Deflickering by Neural Filtering with a Flawed Atlas
Mar 14, 2023Many videos contain flickering artifacts. Common causes of flicker include video processing algorithms, video generation algorithms, and capturing videos under specific situations. Prior work usually requires specific guidance such as the flickering frequency, manual annotations, or extra consistent videos to remove the flicker. In this work, we propose a general flicker removal framework that only receives a single flickering video as input without additional guidance. Since it is blind to a specific flickering type or guidance, we name this "blind deflickering." The core of our approach is utilizing the neural atlas in cooperation with a neural filtering strategy. The neural atlas is a unified representation for all frames in a video that provides temporal consistency guidance but is flawed in many cases. To this end, a neural network is trained to mimic a filter to learn the consistent features (e.g., color, brightness) and avoid introducing the artifacts in the atlas. To validate our method, we construct a dataset that contains diverse real-world flickering videos. Extensive experiments show that our method achieves satisfying deflickering performance and even outperforms baselines that use extra guidance on a public benchmark.