 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeERNIE 5.0 Technical Report
Feb 04, 2026In this report, we introduce ERNIE 5.0, a natively autoregressive foundation model desinged for unified multimodal understanding and generation across text, image, video, and audio. All modalities are trained from scratch under a unified next-group-of-tokens prediction objective, based on an ultra-sparse mixture-of-experts (MoE) architecture with modality-agnostic expert routing. To address practical challenges in large-scale deployment under diverse resource constraints, ERNIE 5.0 adopts a novel elastic training paradigm. Within a single pre-training run, the model learns a family of sub-models with varying depths, expert capacities, and routing sparsity, enabling flexible trade-offs among performance, model size, and inference latency in memory- or time-constrained scenarios. Moreover, we systematically address the challenges of scaling reinforcement learning to unified foundation models, thereby guaranteeing efficient and stable post-training under ultra-sparse MoE architectures and diverse multimodal settings. Extensive experiments demonstrate that ERNIE 5.0 achieves strong and balanced performance across multiple modalities. To the best of our knowledge, among publicly disclosed models, ERNIE 5.0 represents the first production-scale realization of a trillion-parameter unified autoregressive model that supports both multimodal understanding and generation. To facilitate further research, we present detailed visualizations of modality-agnostic expert routing in the unified model, alongside comprehensive empirical analysis of elastic training, aiming to offer profound insights to the community.
Elastic Attention: Test-time Adaptive Sparsity Ratios for Efficient Transformers
Jan 24, 2026The quadratic complexity of standard attention mechanisms poses a significant scalability bottleneck for large language models (LLMs) in long-context scenarios. While hybrid attention strategies that combine sparse and full attention within a single model offer a viable solution, they typically employ static computation ratios (i.e., fixed proportions of sparse versus full attention) and fail to adapt to the varying sparsity sensitivities of downstream tasks during inference. To address this issue, we propose Elastic Attention, which allows the model to dynamically adjust its overall sparsity based on the input. This is achieved by integrating a lightweight Attention Router into the existing pretrained model, which dynamically assigns each attention head to different computation modes. Within only 12 hours of training on 8xA800 GPUs, our method enables models to achieve both strong performance and efficient inference. Experiments across three long-context benchmarks on widely-used LLMs demonstrate the superiority of our method.
DETRs Beat YOLOs on Real-time Object Detection
Apr 17, 2023



Recently, end-to-end transformer-based detectors (DETRs) have achieved remarkable performance. However, the issue of the high computational cost of DETRs has not been effectively addressed, limiting their practical application and preventing them from fully exploiting the benefits of no post-processing, such as non-maximum suppression (NMS). In this paper, we first analyze the influence of NMS in modern real-time object detectors on inference speed, and establish an end-to-end speed benchmark. To avoid the inference delay caused by NMS, we propose a Real-Time DEtection TRansformer (RT-DETR), the first real-time end-to-end object detector to our best knowledge. Specifically, we design an efficient hybrid encoder to efficiently process multi-scale features by decoupling the intra-scale interaction and cross-scale fusion, and propose IoU-aware query selection to improve the initialization of object queries. In addition, our proposed detector supports flexibly adjustment of the inference speed by using different decoder layers without the need for retraining, which facilitates the practical application of real-time object detectors. Our RT-DETR-L achieves 53.0% AP on COCO val2017 and 114 FPS on T4 GPU, while RT-DETR-X achieves 54.8% AP and 74 FPS, outperforming all YOLO detectors of the same scale in both speed and accuracy. Furthermore, our RT-DETR-R50 achieves 53.1% AP and 108 FPS, outperforming DINO-Deformable-DETR-R50 by 2.2% AP in accuracy and by about 21 times in FPS. Source code and pretrained models will be available at PaddleDetection.
PP-YOLOE-R: An Efficient Anchor-Free Rotated Object Detector
Nov 04, 2022



Arbitrary-oriented object detection is a fundamental task in visual scenes involving aerial images and scene text. In this report, we present PP-YOLOE-R, an efficient anchor-free rotated object detector based on PP-YOLOE. We introduce a bag of useful tricks in PP-YOLOE-R to improve detection precision with marginal extra parameters and computational cost. As a result, PP-YOLOE-R-l and PP-YOLOE-R-x achieve 78.14 and 78.28 mAP respectively on DOTA 1.0 dataset with single-scale training and testing, which outperform almost all other rotated object detectors. With multi-scale training and testing, PP-YOLOE-R-l and PP-YOLOE-R-x further improve the detection precision to 80.02 and 80.73 mAP. In this case, PP-YOLOE-R-x surpasses all anchor-free methods and demonstrates competitive performance to state-of-the-art anchor-based two-stage models. Further, PP-YOLOE-R is deployment friendly and PP-YOLOE-R-s/m/l/x can reach 69.8/55.1/48.3/37.1 FPS respectively on RTX 2080 Ti with TensorRT and FP16-precision. Source code and pre-trained models are available at https://github.com/PaddlePaddle/PaddleDetection, which is powered by https://github.com/PaddlePaddle/Paddle.
PP-Matting: High-Accuracy Natural Image Matting
Apr 20, 2022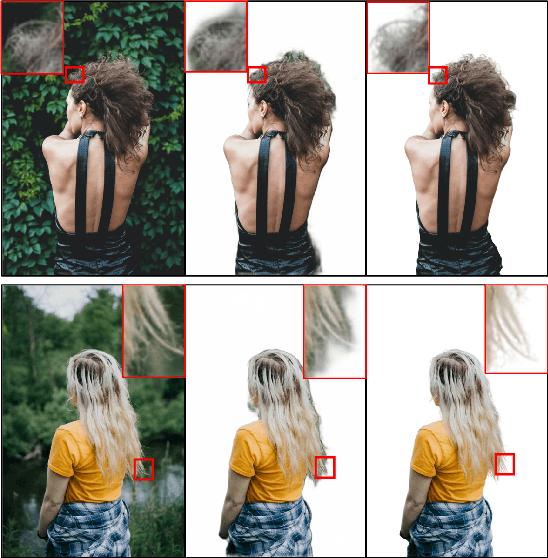
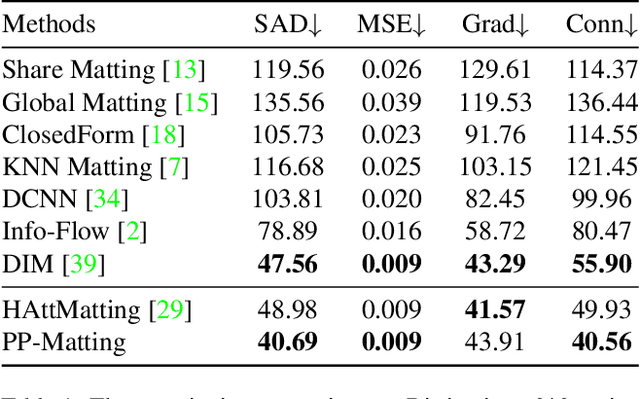
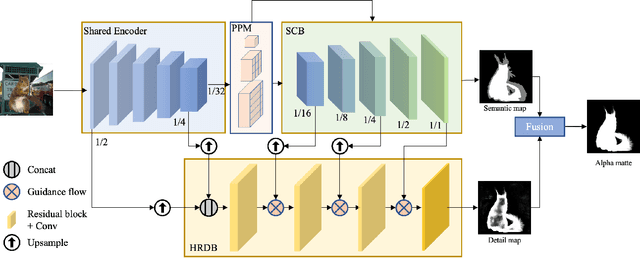
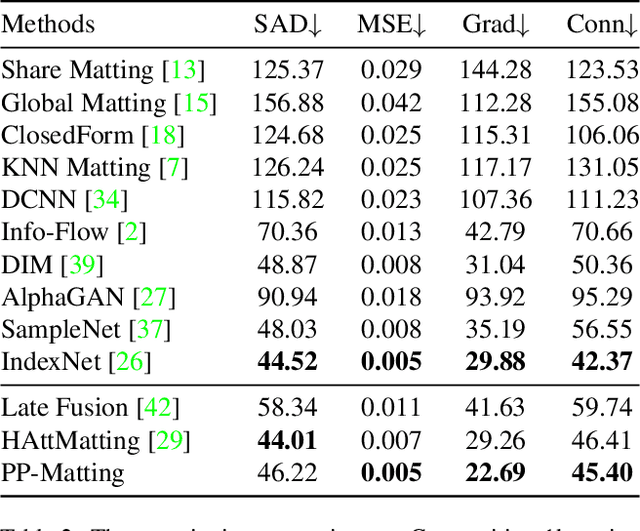
Natural image matting is a fundamental and challenging computer vision task. It has many applications in image editing and composition. Recently, deep learning-based approaches have achieved great improvements in image matting. However, most of them require a user-supplied trimap as an auxiliary input, which limits the matting applications in the real world. Although some trimap-free approaches have been proposed, the matting quality is still unsatisfactory compared to trimap-based ones. Without the trimap guidance, the matting models suffer from foreground-background ambiguity easily, and also generate blurry details in the transition area. In this work, we propose PP-Matting, a trimap-free architecture that can achieve high-accuracy natural image matting. Our method applies a high-resolution detail branch (HRDB) that extracts fine-grained details of the foreground with keeping feature resolution unchanged. Also, we propose a semantic context branch (SCB) that adopts a semantic segmentation subtask. It prevents the detail prediction from local ambiguity caused by semantic context missing. In addition, we conduct extensive experiments on two well-known benchmarks: Composition-1k and Distinctions-646. The results demonstrate the superiority of PP-Matting over previous methods. Furthermore, we provide a qualitative evaluation of our method on human matting which shows its outstanding performance in the practical application. The code and pre-trained models will be available at PaddleSeg: https://github.com/PaddlePaddle/PaddleSeg.
PP-LiteSeg: A Superior Real-Time Semantic Segmentation Model
Apr 06, 2022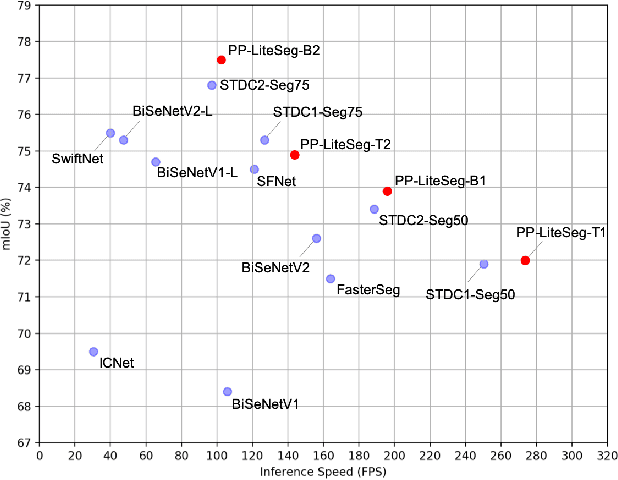
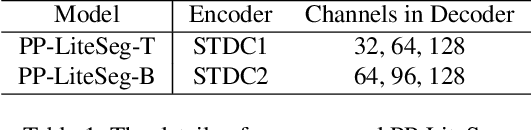
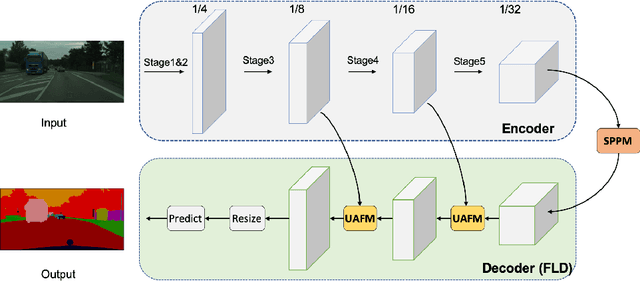
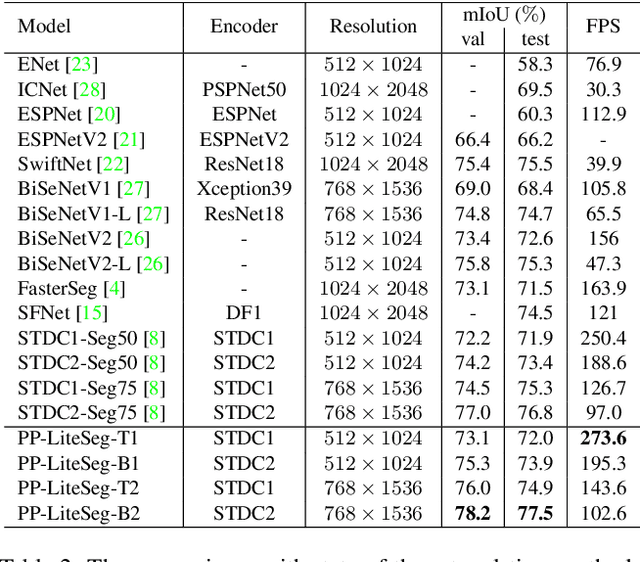
Real-world applications have high demands for semantic segmentation methods. Although semantic segmentation has made remarkable leap-forwards with deep learning, the performance of real-time methods is not satisfactory. In this work, we propose PP-LiteSeg, a novel lightweight model for the real-time semantic segmentation task. Specifically, we present a Flexible and Lightweight Decoder (FLD) to reduce computation overhead of previous decoder. To strengthen feature representations, we propose a Unified Attention Fusion Module (UAFM), which takes advantage of spatial and channel attention to produce a weight and then fuses the input features with the weight. Moreover, a Simple Pyramid Pooling Module (SPPM) is proposed to aggregate global context with low computation cost. Extensive evaluations demonstrate that PP-LiteSeg achieves a superior trade-off between accuracy and speed compared to other methods. On the Cityscapes test set, PP-LiteSeg achieves 72.0% mIoU/273.6 FPS and 77.5% mIoU/102.6 FPS on NVIDIA GTX 1080Ti. Source code and models are available at PaddleSeg: https://github.com/PaddlePaddle/PaddleSeg.
PP-YOLOE: An evolved version of YOLO
Apr 02, 2022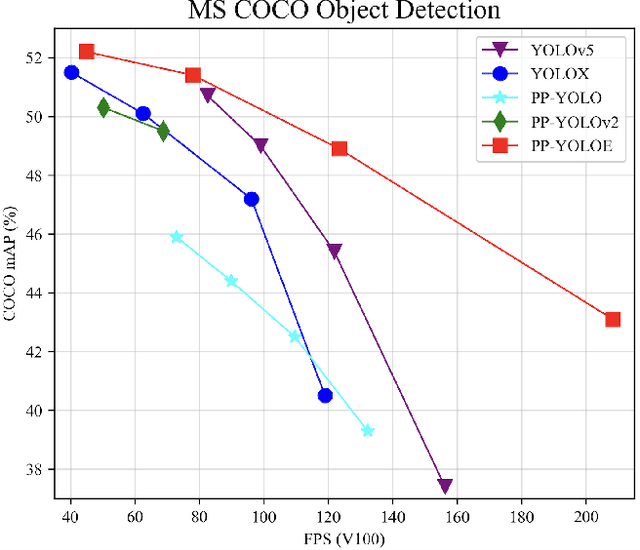
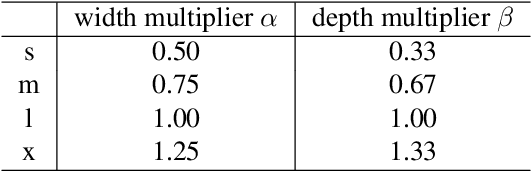
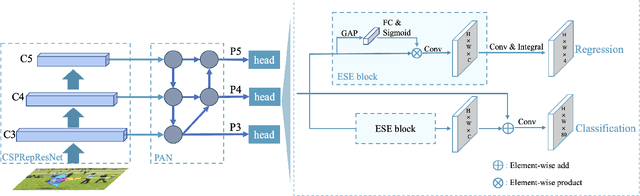

In this report, we present PP-YOLOE, an industrial state-of-the-art object detector with high performance and friendly deployment. We optimize on the basis of the previous PP-YOLOv2, using anchor-free paradigm, more powerful backbone and neck equipped with CSPRepResStage, ET-head and dynamic label assignment algorithm TAL. We provide s/m/l/x models for different practice scenarios. As a result, PP-YOLOE-l achieves 51.4 mAP on COCO test-dev and 78.1 FPS on Tesla V100, yielding a remarkable improvement of (+1.9 AP, +13.35% speed up) and (+1.3 AP, +24.96% speed up), compared to the previous state-of-the-art industrial models PP-YOLOv2 and YOLOX respectively. Further, PP-YOLOE inference speed achieves 149.2 FPS with TensorRT and FP16-precision. We also conduct extensive experiments to verify the effectiveness of our designs. Source code and pre-trained models are available at https://github.com/PaddlePaddle/PaddleDetection.
BiBERT: Accurate Fully Binarized BERT
Mar 12, 2022


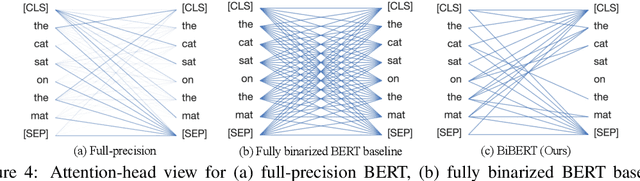
The large pre-trained BERT has achieved remarkable performance on Natural Language Processing (NLP) tasks but is also computation and memory expensive. As one of the powerful compression approaches, binarization extremely reduces the computation and memory consumption by utilizing 1-bit parameters and bitwise operations. Unfortunately, the full binarization of BERT (i.e., 1-bit weight, embedding, and activation) usually suffer a significant performance drop, and there is rare study addressing this problem. In this paper, with the theoretical justification and empirical analysis, we identify that the severe performance drop can be mainly attributed to the information degradation and optimization direction mismatch respectively in the forward and backward propagation, and propose BiBERT, an accurate fully binarized BERT, to eliminate the performance bottlenecks. Specifically, BiBERT introduces an efficient Bi-Attention structure for maximizing representation information statistically and a Direction-Matching Distillation (DMD) scheme to optimize the full binarized BERT accurately. Extensive experiments show that BiBERT outperforms both the straightforward baseline and existing state-of-the-art quantized BERTs with ultra-low bit activations by convincing margins on the NLP benchmark. As the first fully binarized BERT, our method yields impressive 56.3 times and 31.2 times saving on FLOPs and model size, demonstrating the vast advantages and potential of the fully binarized BERT model in real-world resource-constrained scenarios.
PP-MSVSR: Multi-Stage Video Super-Resolution
Dec 06, 2021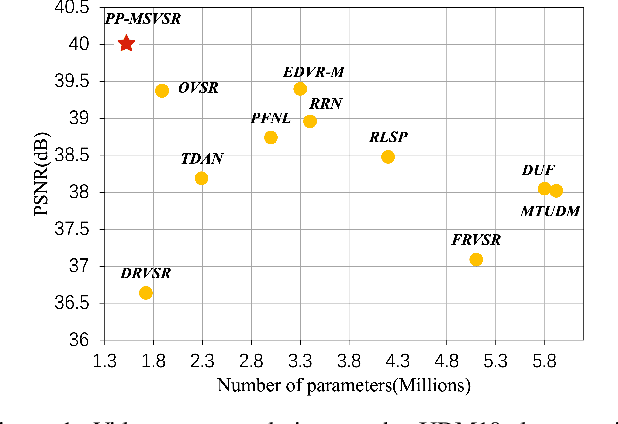
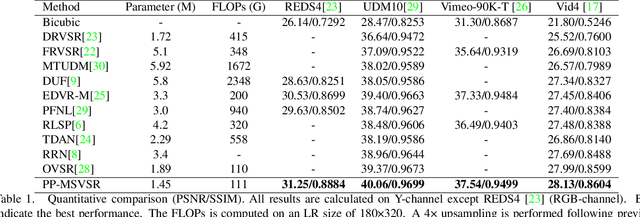
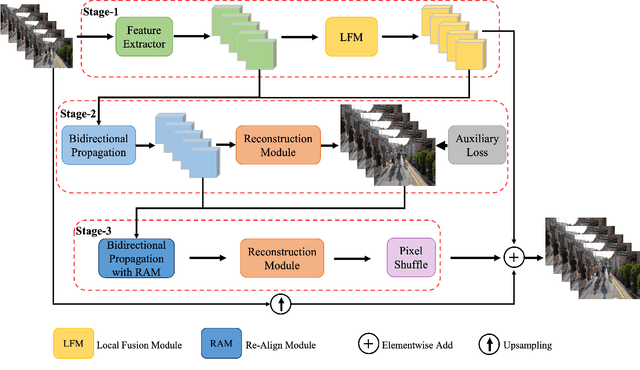
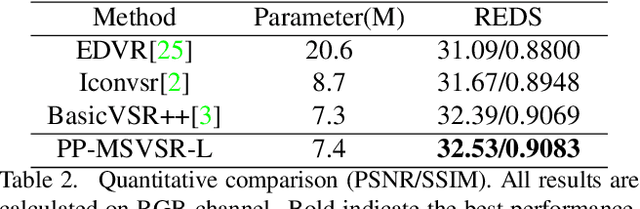
Different from the Single Image Super-Resolution(SISR) task, the key for Video Super-Resolution(VSR) task is to make full use of complementary information across frames to reconstruct the high-resolution sequence. Since images from different frames with diverse motion and scene, accurately aligning multiple frames and effectively fusing different frames has always been the key research work of VSR tasks. To utilize rich complementary information of neighboring frames, in this paper, we propose a multi-stage VSR deep architecture, dubbed as PP-MSVSR, with local fusion module, auxiliary loss and re-align module to refine the enhanced result progressively. Specifically, in order to strengthen the fusion of features across frames in feature propagation, a local fusion module is designed in stage-1 to perform local feature fusion before feature propagation. Moreover, we introduce an auxiliary loss in stage-2 to make the features obtained by the propagation module reserve more correlated information connected to the HR space, and introduce a re-align module in stage-3 to make full use of the feature information of the previous stage. Extensive experiments substantiate that PP-MSVSR achieves a promising performance of Vid4 datasets, which achieves a PSNR of 28.13dB with only 1.45M parameters. And the PP-MSVSR-L exceeds all state of the art method on REDS4 datasets with considerable parameters. Code and models will be released in PaddleGAN\footnote{https://github.com/PaddlePaddle/PaddleGAN.}.
PP-PicoDet: A Better Real-Time Object Detector on Mobile Devices
Nov 01, 2021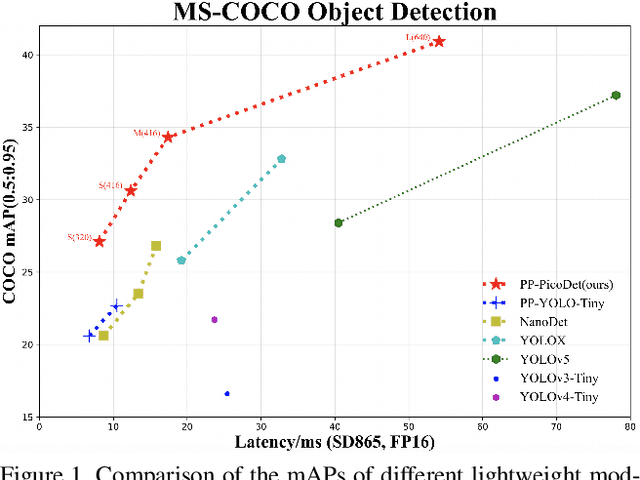
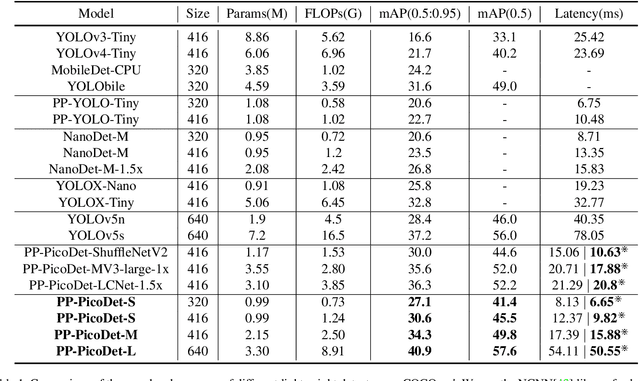
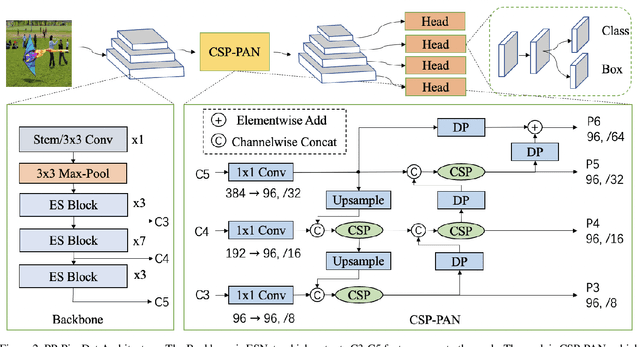
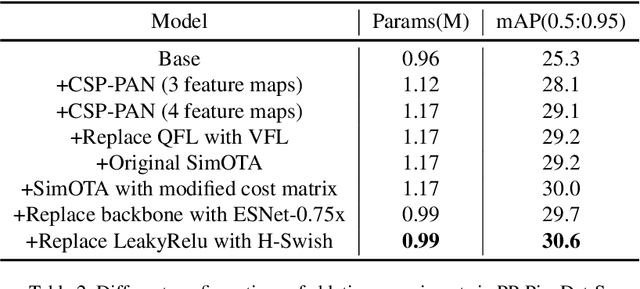
The better accuracy and efficiency trade-off has been a challenging problem in object detection. In this work, we are dedicated to studying key optimizations and neural network architecture choices for object detection to improve accuracy and efficiency. We investigate the applicability of the anchor-free strategy on lightweight object detection models. We enhance the backbone structure and design the lightweight structure of the neck, which improves the feature extraction ability of the network. We improve label assignment strategy and loss function to make training more stable and efficient. Through these optimizations, we create a new family of real-time object detectors, named PP-PicoDet, which achieves superior performance on object detection for mobile devices. Our models achieve better trade-offs between accuracy and latency compared to other popular models. PicoDet-S with only 0.99M parameters achieves 30.6% mAP, which is an absolute 4.8% improvement in mAP while reducing mobile CPU inference latency by 55% compared to YOLOX-Nano, and is an absolute 7.1% improvement in mAP compared to NanoDet. It reaches 123 FPS (150 FPS using Paddle Lite) on mobile ARM CPU when the input size is 320. PicoDet-L with only 3.3M parameters achieves 40.9% mAP, which is an absolute 3.7% improvement in mAP and 44% faster than YOLOv5s. As shown in Figure 1, our models far outperform the state-of-the-art results for lightweight object detection. Code and pre-trained models are available at https://github.com/PaddlePaddle/PaddleDetection.