 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn-to-learn on Arbitrary Textual Conditioning: A Hypernetwork-Driven Meta-Gated LLM
May 03, 2026Conventional LLMs may suffer from corpus heterogeneity and subtle condition changes. While finetuning can create the catastrophe forgetting issue, application of meta-learning on LLMs is also limited due to its complexity and scalability. In this paper, we activate the meta-signal of $β$ within the SwiGLU blocks, resulting in a meta-gating mechanism that adaptively adjusts the nonlinearity of FFN. A hypernetwork is employed which dynamically produces $β$ on textual conditions, providing meta-controllability on LLMs. By testing on different condition types such as task, domain, persona, and style, our method outperforms finetuning and meta-learning baselines, and can generalize reasonably on unseen tasks, condition types, or instructions. Our code can be found in https://github.com/AaronJi/MeGan.
LLaDA2.0-Uni: Unifying Multimodal Understanding and Generation with Diffusion Large Language Model
Apr 22, 2026We present LLaDA2.0-Uni, a unified discrete diffusion large language model (dLLM) that supports multimodal understanding and generation within a natively integrated framework. Its architecture combines a fully semantic discrete tokenizer, a MoE-based dLLM backbone, and a diffusion decoder. By discretizing continuous visual inputs via SigLIP-VQ, the model enables block-level masked diffusion for both text and vision inputs within the backbone, while the decoder reconstructs visual tokens into high-fidelity images. Inference efficiency is enhanced beyond parallel decoding through prefix-aware optimizations in the backbone and few-step distillation in the decoder. Supported by carefully curated large-scale data and a tailored multi-stage training pipeline, LLaDA2.0-Uni matches specialized VLMs in multimodal understanding while delivering strong performance in image generation and editing. Its native support for interleaved generation and reasoning establishes a promising and scalable paradigm for next-generation unified foundation models. Codes and models are available at https://github.com/inclusionAI/LLaDA2.0-Uni.
Project Imaging-X: A Survey of 1000+ Open-Access Medical Imaging Datasets for Foundation Model Development
Mar 29, 2026Foundation models have demonstrated remarkable success across diverse domains and tasks, primarily due to the thrive of large-scale, diverse, and high-quality datasets. However, in the field of medical imaging, the curation and assembling of such medical datasets are highly challenging due to the reliance on clinical expertise and strict ethical and privacy constraints, resulting in a scarcity of large-scale unified medical datasets and hindering the development of powerful medical foundation models. In this work, we present the largest survey to date of medical image datasets, covering over 1,000 open-access datasets with a systematic catalog of their modalities, tasks, anatomies, annotations, limitations, and potential for integration. Our analysis exposes a landscape that is modest in scale, fragmented across narrowly scoped tasks, and unevenly distributed across organs and modalities, which in turn limits the utility of existing medical image datasets for developing versatile and robust medical foundation models. To turn fragmentation into scale, we propose a metadata-driven fusion paradigm (MDFP) that integrates public datasets with shared modalities or tasks, thereby transforming multiple small data silos into larger, more coherent resources. Building on MDFP, we release an interactive discovery portal that enables end-to-end, automated medical image dataset integration, and compile all surveyed datasets into a unified, structured table that clearly summarizes their key characteristics and provides reference links, offering the community an accessible and comprehensive repository. By charting the current terrain and offering a principled path to dataset consolidation, our survey provides a practical roadmap for scaling medical imaging corpora, supporting faster data discovery, more principled dataset creation, and more capable medical foundation models.
InternVL-U: Democratizing Unified Multimodal Models for Understanding, Reasoning, Generation and Editing
Mar 10, 2026Unified multimodal models (UMMs) that integrate understanding, reasoning, generation, and editing face inherent trade-offs between maintaining strong semantic comprehension and acquiring powerful generation capabilities. In this report, we present InternVL-U, a lightweight 4B-parameter UMM that democratizes these capabilities within a unified framework. Guided by the principles of unified contextual modeling and modality-specific modular design with decoupled visual representations, InternVL-U integrates a state-of-the-art Multimodal Large Language Model (MLLM) with a specialized MMDiT-based visual generation head. To further bridge the gap between aesthetic generation and high-level intelligence, we construct a comprehensive data synthesis pipeline targeting high-semantic-density tasks, such as text rendering and scientific reasoning, under a reasoning-centric paradigm that leverages Chain-of-Thought (CoT) to better align abstract user intent with fine-grained visual generation details. Extensive experiments demonstrate that InternVL-U achieves a superior performance - efficiency balance. Despite using only 4B parameters, it consistently outperforms unified baseline models with over 3x larger scales such as BAGEL (14B) on various generation and editing tasks, while retaining strong multimodal understanding and reasoning capabilities.
Accelerating Masked Image Generation by Learning Latent Controlled Dynamics
Feb 27, 2026Masked Image Generation Models (MIGMs) have achieved great success, yet their efficiency is hampered by the multiple steps of bi-directional attention. In fact, there exists notable redundancy in their computation: when sampling discrete tokens, the rich semantics contained in the continuous features are lost. Some existing works attempt to cache the features to approximate future features. However, they exhibit considerable approximation error under aggressive acceleration rates. We attribute this to their limited expressivity and the failure to account for sampling information. To fill this gap, we propose to learn a lightweight model that incorporates both previous features and sampled tokens, and regresses the average velocity field of feature evolution. The model has moderate complexity that suffices to capture the subtle dynamics while keeping lightweight compared to the original base model. We apply our method, MIGM-Shortcut, to two representative MIGM architectures and tasks. In particular, on the state-of-the-art Lumina-DiMOO, it achieves over 4x acceleration of text-to-image generation while maintaining quality, significantly pushing the Pareto frontier of masked image generation. The code and model weights are available at https://github.com/Kaiwen-Zhu/MIGM-Shortcut.
Training-Free Acceleration for Document Parsing Vision-Language Model with Hierarchical Speculative Decoding
Feb 13, 2026Document parsing is a fundamental task in multimodal understanding, supporting a wide range of downstream applications such as information extraction and intelligent document analysis. Benefiting from strong semantic modeling and robust generalization, VLM-based end-to-end approaches have emerged as the mainstream paradigm in recent years. However, these models often suffer from substantial inference latency, as they must auto-regressively generate long token sequences when processing long-form documents. In this work, motivated by the extremely long outputs and complex layout structures commonly found in document parsing, we propose a training-free and highly efficient acceleration method. Inspired by speculative decoding, we employ a lightweight document parsing pipeline as a draft model to predict batches of future tokens, while the more accurate VLM verifies these draft predictions in parallel. Moreover, we further exploit the layout-structured nature of documents by partitioning each page into independent regions, enabling parallel decoding of each region using the same draft-verify strategy. The final predictions are then assembled according to the natural reading order. Experimental results demonstrate the effectiveness of our approach: on the general-purpose OmniDocBench, our method provides a 2.42x lossless acceleration for the dots.ocr model, and achieves up to 4.89x acceleration on long-document parsing tasks. We will release our code to facilitate reproducibility and future research.
UniPercept: Towards Unified Perceptual-Level Image Understanding across Aesthetics, Quality, Structure, and Texture
Dec 25, 2025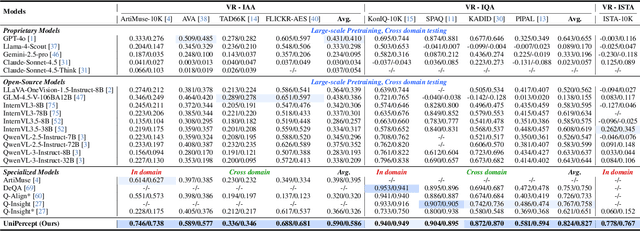
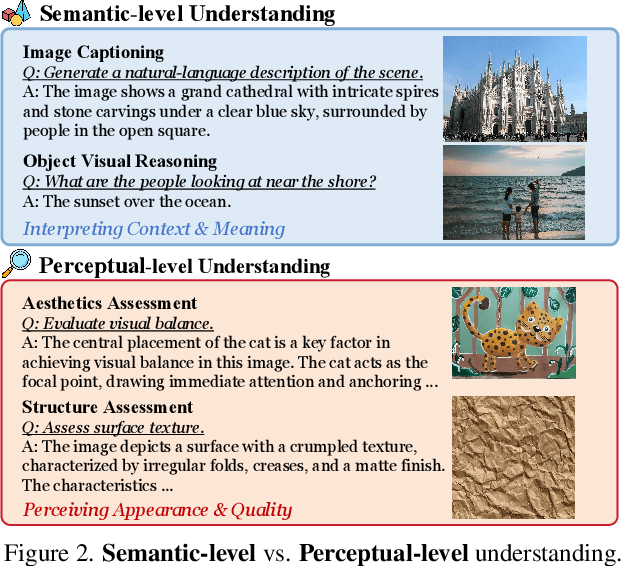
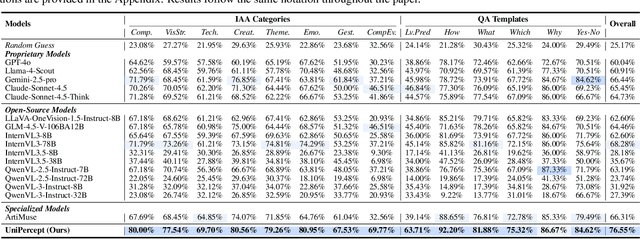
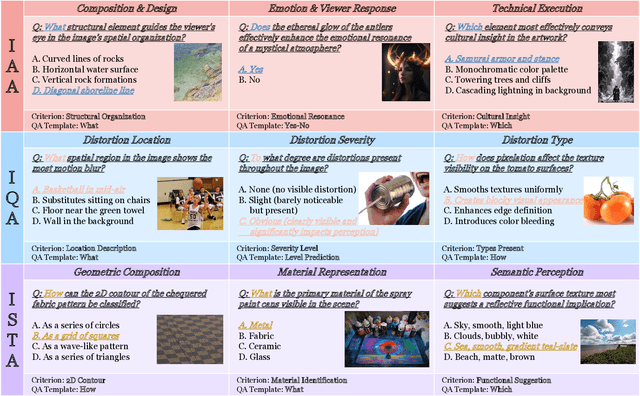
Multimodal large language models (MLLMs) have achieved remarkable progress in visual understanding tasks such as visual grounding, segmentation, and captioning. However, their ability to perceive perceptual-level image features remains limited. In this work, we present UniPercept-Bench, a unified framework for perceptual-level image understanding across three key domains: Aesthetics, Quality, Structure and Texture. We establish a hierarchical definition system and construct large-scale datasets to evaluate perceptual-level image understanding. Based on this foundation, we develop a strong baseline UniPercept trained via Domain-Adaptive Pre-Training and Task-Aligned RL, enabling robust generalization across both Visual Rating (VR) and Visual Question Answering (VQA) tasks. UniPercept outperforms existing MLLMs on perceptual-level image understanding and can serve as a plug-and-play reward model for text-to-image generation. This work defines Perceptual-Level Image Understanding in the era of MLLMs and, through the introduction of a comprehensive benchmark together with a strong baseline, provides a solid foundation for advancing perceptual-level multimodal image understanding.
dMLLM-TTS: Self-Verified and Efficient Test-Time Scaling for Diffusion Multi-Modal Large Language Models
Dec 22, 2025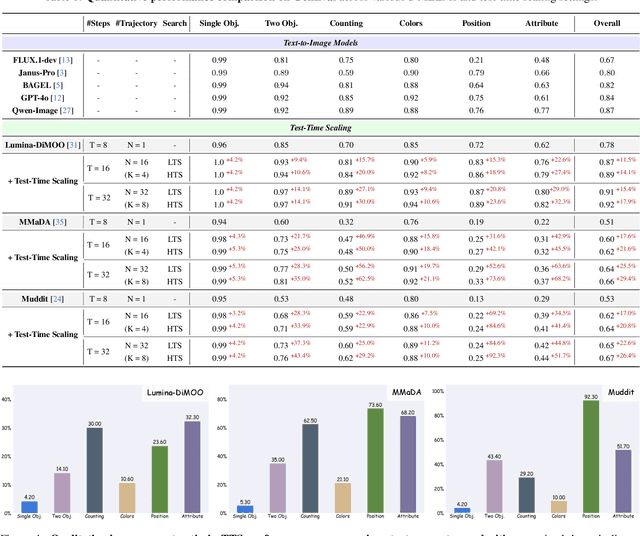
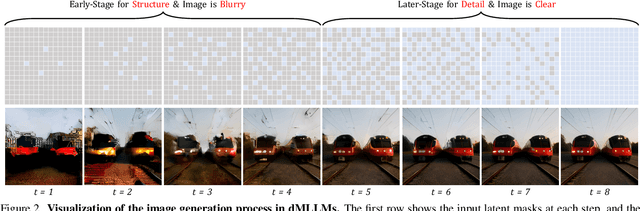
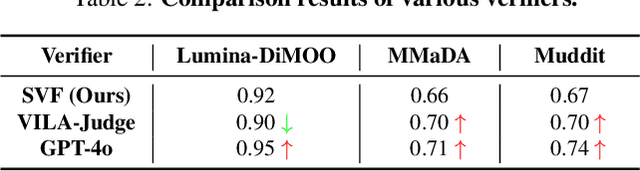
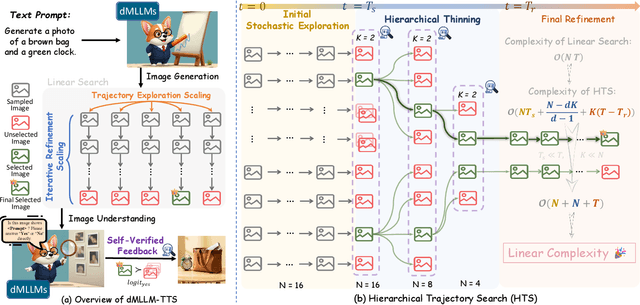
Diffusion Multi-modal Large Language Models (dMLLMs) have recently emerged as a novel architecture unifying image generation and understanding. However, developing effective and efficient Test-Time Scaling (TTS) methods to unlock their full generative potential remains an underexplored challenge. To address this, we propose dMLLM-TTS, a novel framework operating on two complementary scaling axes: (1) trajectory exploration scaling to enhance the diversity of generated hypotheses, and (2) iterative refinement scaling for stable generation. Conventional TTS approaches typically perform linear search across these two dimensions, incurring substantial computational costs of O(NT) and requiring an external verifier for best-of-N selection. To overcome these limitations, we propose two innovations. First, we design an efficient hierarchical search algorithm with O(N+T) complexity that adaptively expands and prunes sampling trajectories. Second, we introduce a self-verified feedback mechanism that leverages the dMLLMs' intrinsic image understanding capabilities to assess text-image alignment, eliminating the need for external verifier. Extensive experiments on the GenEval benchmark across three representative dMLLMs (e.g., Lumina-DiMOO, MMaDA, Muddit) show that our framework substantially improves generation quality while achieving up to 6x greater efficiency than linear search. Project page: https://github.com/Alpha-VLLM/Lumina-DiMOO.
Lumina-mGPT 2.0: Stand-Alone AutoRegressive Image Modeling
Jul 23, 2025



We present Lumina-mGPT 2.0, a stand-alone, decoder-only autoregressive model that revisits and revitalizes the autoregressive paradigm for high-quality image generation and beyond. Unlike existing approaches that rely on pretrained components or hybrid architectures, Lumina-mGPT 2.0 is trained entirely from scratch, enabling unrestricted architectural design and licensing freedom. It achieves generation quality on par with state-of-the-art diffusion models such as DALL-E 3 and SANA, while preserving the inherent flexibility and compositionality of autoregressive modeling. Our unified tokenization scheme allows the model to seamlessly handle a wide spectrum of tasks-including subject-driven generation, image editing, controllable synthesis, and dense prediction-within a single generative framework. To further boost usability, we incorporate efficient decoding strategies like inference-time scaling and speculative Jacobi sampling to improve quality and speed, respectively. Extensive evaluations on standard text-to-image benchmarks (e.g., GenEval, DPG) demonstrate that Lumina-mGPT 2.0 not only matches but in some cases surpasses diffusion-based models. Moreover, we confirm its multi-task capabilities on the Graph200K benchmark, with the native Lumina-mGPT 2.0 performing exceptionally well. These results position Lumina-mGPT 2.0 as a strong, flexible foundation model for unified multimodal generation. We have released our training details, code, and models at https://github.com/Alpha-VLLM/Lumina-mGPT-2.0.
Resurrect Mask AutoRegressive Modeling for Efficient and Scalable Image Generation
Jul 17, 2025

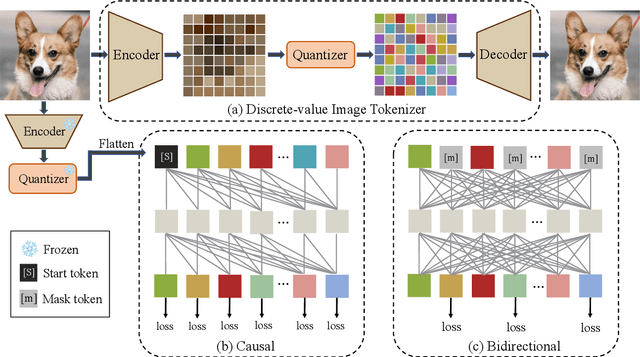

AutoRegressive (AR) models have made notable progress in image generation, with Masked AutoRegressive (MAR) models gaining attention for their efficient parallel decoding. However, MAR models have traditionally underperformed when compared to standard AR models. This study refines the MAR architecture to improve image generation quality. We begin by evaluating various image tokenizers to identify the most effective one. Subsequently, we introduce an improved Bidirectional LLaMA architecture by replacing causal attention with bidirectional attention and incorporating 2D RoPE, which together form our advanced model, MaskGIL. Scaled from 111M to 1.4B parameters, MaskGIL achieves a FID score of 3.71, matching state-of-the-art AR models in the ImageNet 256x256 benchmark, while requiring only 8 inference steps compared to the 256 steps of AR models. Furthermore, we develop a text-driven MaskGIL model with 775M parameters for generating images from text at various resolutions. Beyond image generation, MaskGIL extends to accelerate AR-based generation and enable real-time speech-to-image conversion. Our codes and models are available at https://github.com/synbol/MaskGIL.