 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptionLM: Open-Access Data and Models for Detailed Visual Understanding
Apr 17, 2025



Vision-language models are integral to computer vision research, yet many high-performing models remain closed-source, obscuring their data, design and training recipe. The research community has responded by using distillation from black-box models to label training data, achieving strong benchmark results, at the cost of measurable scientific progress. However, without knowing the details of the teacher model and its data sources, scientific progress remains difficult to measure. In this paper, we study building a Perception Language Model (PLM) in a fully open and reproducible framework for transparent research in image and video understanding. We analyze standard training pipelines without distillation from proprietary models and explore large-scale synthetic data to identify critical data gaps, particularly in detailed video understanding. To bridge these gaps, we release 2.8M human-labeled instances of fine-grained video question-answer pairs and spatio-temporally grounded video captions. Additionally, we introduce PLM-VideoBench, a suite for evaluating challenging video understanding tasks focusing on the ability to reason about "what", "where", "when", and "how" of a video. We make our work fully reproducible by providing data, training recipes, code & models.
Perception Encoder: The best visual embeddings are not at the output of the network
Apr 17, 2025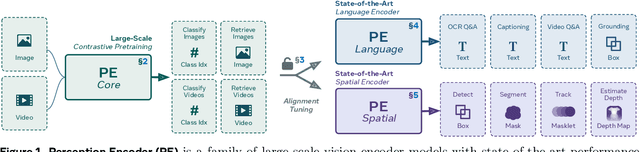

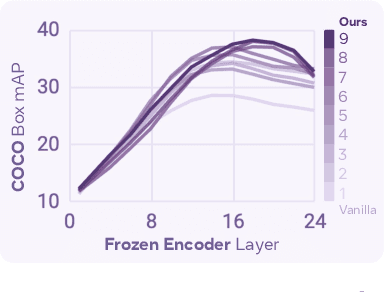
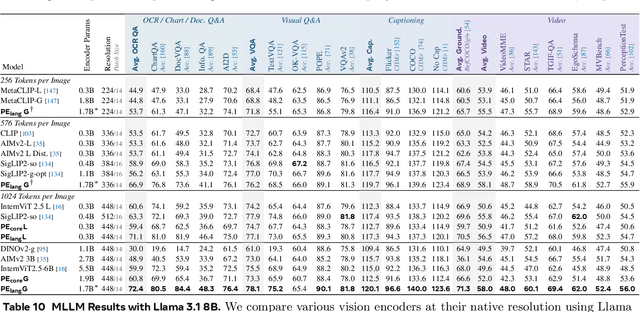
We introduce Perception Encoder (PE), a state-of-the-art encoder for image and video understanding trained via simple vision-language learning. Traditionally, vision encoders have relied on a variety of pretraining objectives, each tailored to specific downstream tasks such as classification, captioning, or localization. Surprisingly, after scaling our carefully tuned image pretraining recipe and refining with our robust video data engine, we find that contrastive vision-language training alone can produce strong, general embeddings for all of these downstream tasks. There is only one caveat: these embeddings are hidden within the intermediate layers of the network. To draw them out, we introduce two alignment methods, language alignment for multimodal language modeling, and spatial alignment for dense prediction. Together with the core contrastive checkpoint, our PE family of models achieves state-of-the-art performance on a wide variety of tasks, including zero-shot image and video classification and retrieval; document, image, and video Q&A; and spatial tasks such as detection, depth estimation, and tracking. To foster further research, we are releasing our models, code, and a novel dataset of synthetically and human-annotated videos.
PVUW 2025 Challenge Report: Advances in Pixel-level Understanding of Complex Videos in the Wild
Apr 15, 2025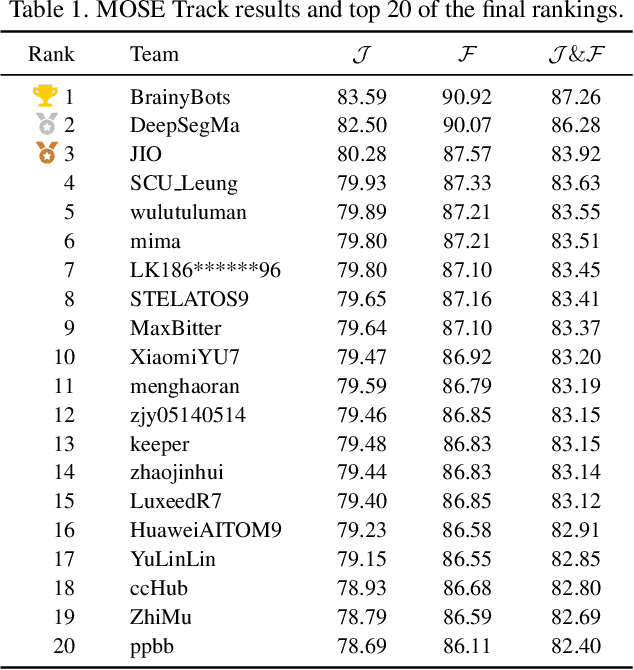
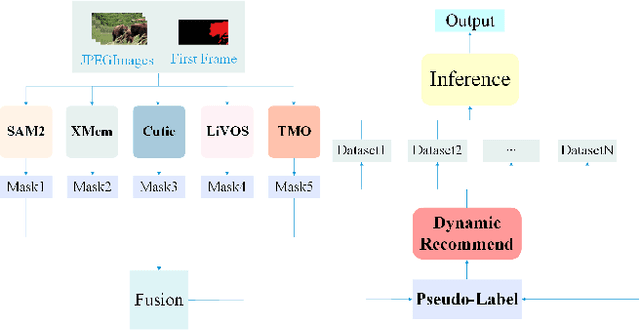
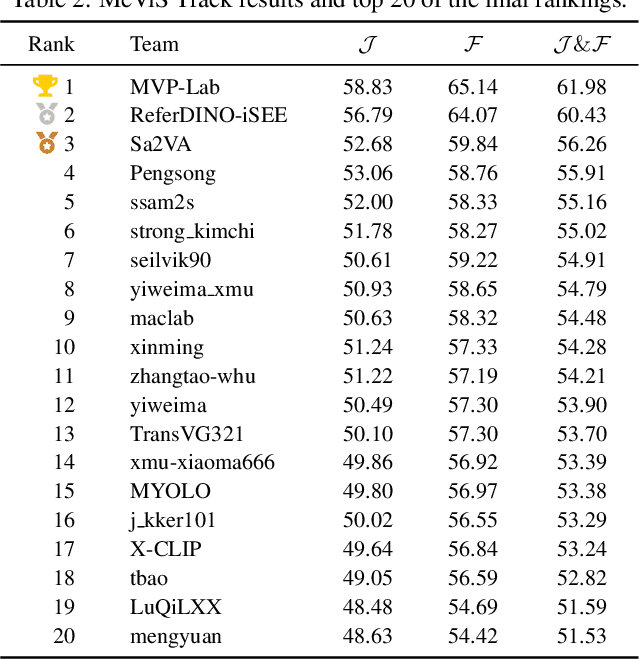
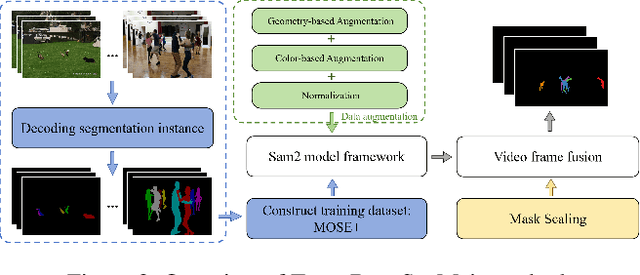
This report provides a comprehensive overview of the 4th Pixel-level Video Understanding in the Wild (PVUW) Challenge, held in conjunction with CVPR 2025. It summarizes the challenge outcomes, participating methodologies, and future research directions. The challenge features two tracks: MOSE, which focuses on complex scene video object segmentation, and MeViS, which targets motion-guided, language-based video segmentation. Both tracks introduce new, more challenging datasets designed to better reflect real-world scenarios. Through detailed evaluation and analysis, the challenge offers valuable insights into the current state-of-the-art and emerging trends in complex video segmentation. More information can be found on the workshop website: https://pvuw.github.io/.
SAM 2: Segment Anything in Images and Videos
Aug 01, 2024



We present Segment Anything Model 2 (SAM 2), a foundation model towards solving promptable visual segmentation in images and videos. We build a data engine, which improves model and data via user interaction, to collect the largest video segmentation dataset to date. Our model is a simple transformer architecture with streaming memory for real-time video processing. SAM 2 trained on our data provides strong performance across a wide range of tasks. In video segmentation, we observe better accuracy, using 3x fewer interactions than prior approaches. In image segmentation, our model is more accurate and 6x faster than the Segment Anything Model (SAM). We believe that our data, model, and insights will serve as a significant milestone for video segmentation and related perception tasks. We are releasing a version of our model, the dataset and an interactive demo.
PVUW 2024 Challenge on Complex Video Understanding: Methods and Results
Jun 24, 2024



Pixel-level Video Understanding in the Wild Challenge (PVUW) focus on complex video understanding. In this CVPR 2024 workshop, we add two new tracks, Complex Video Object Segmentation Track based on MOSE dataset and Motion Expression guided Video Segmentation track based on MeViS dataset. In the two new tracks, we provide additional videos and annotations that feature challenging elements, such as the disappearance and reappearance of objects, inconspicuous small objects, heavy occlusions, and crowded environments in MOSE. Moreover, we provide a new motion expression guided video segmentation dataset MeViS to study the natural language-guided video understanding in complex environments. These new videos, sentences, and annotations enable us to foster the development of a more comprehensive and robust pixel-level understanding of video scenes in complex environments and realistic scenarios. The MOSE challenge had 140 registered teams in total, 65 teams participated the validation phase and 12 teams made valid submissions in the final challenge phase. The MeViS challenge had 225 registered teams in total, 50 teams participated the validation phase and 5 teams made valid submissions in the final challenge phase.
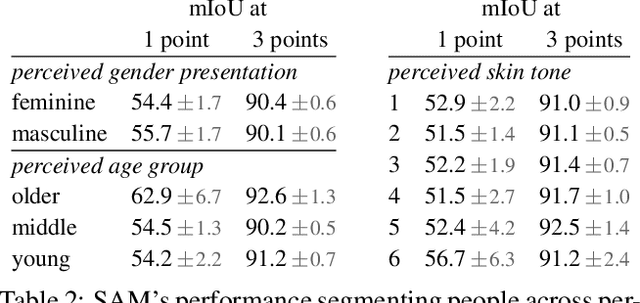
FACET: Fairness in Computer Vision Evaluation Benchmark
Aug 31, 2023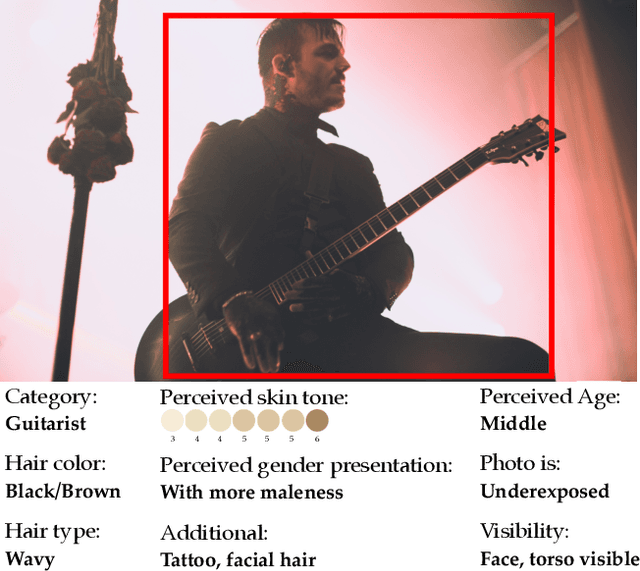
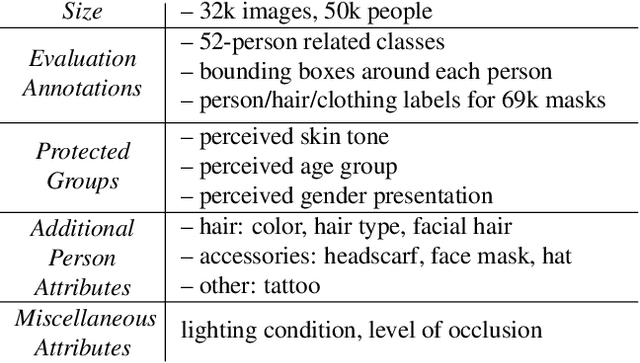
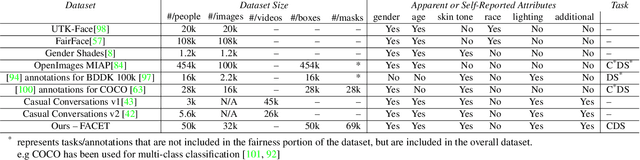
Computer vision models have known performance disparities across attributes such as gender and skin tone. This means during tasks such as classification and detection, model performance differs for certain classes based on the demographics of the people in the image. These disparities have been shown to exist, but until now there has not been a unified approach to measure these differences for common use-cases of computer vision models. We present a new benchmark named FACET (FAirness in Computer Vision EvaluaTion), a large, publicly available evaluation set of 32k images for some of the most common vision tasks - image classification, object detection and segmentation. For every image in FACET, we hired expert reviewers to manually annotate person-related attributes such as perceived skin tone and hair type, manually draw bounding boxes and label fine-grained person-related classes such as disk jockey or guitarist. In addition, we use FACET to benchmark state-of-the-art vision models and present a deeper understanding of potential performance disparities and challenges across sensitive demographic attributes. With the exhaustive annotations collected, we probe models using single demographics attributes as well as multiple attributes using an intersectional approach (e.g. hair color and perceived skin tone). Our results show that classification, detection, segmentation, and visual grounding models exhibit performance disparities across demographic attributes and intersections of attributes. These harms suggest that not all people represented in datasets receive fair and equitable treatment in these vision tasks. We hope current and future results using our benchmark will contribute to fairer, more robust vision models. FACET is available publicly at https://facet.metademolab.com/
Segment Anything
Apr 05, 2023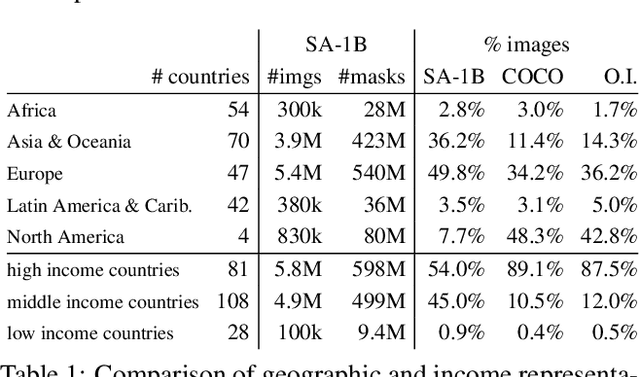


We introduce the Segment Anything (SA) project: a new task, model, and dataset for image segmentation. Using our efficient model in a data collection loop, we built the largest segmentation dataset to date (by far), with over 1 billion masks on 11M licensed and privacy respecting images. The model is designed and trained to be promptable, so it can transfer zero-shot to new image distributions and tasks. We evaluate its capabilities on numerous tasks and find that its zero-shot performance is impressive -- often competitive with or even superior to prior fully supervised results. We are releasing the Segment Anything Model (SAM) and corresponding dataset (SA-1B) of 1B masks and 11M images at https://segment-anything.com to foster research into foundation models for computer vision.
Omni3D: A Large Benchmark and Model for 3D Object Detection in the Wild
Jul 21, 2022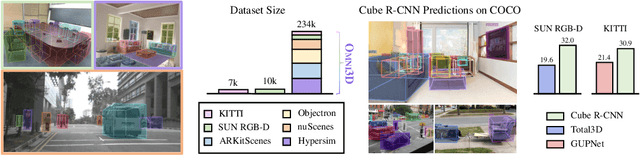
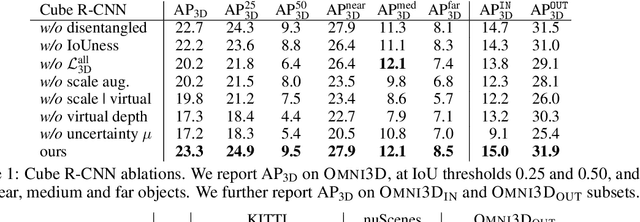
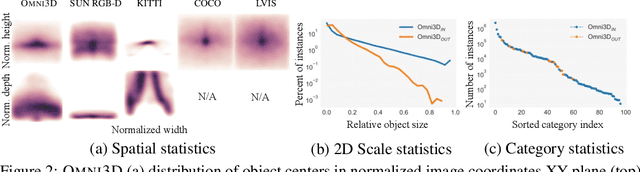
Recognizing scenes and objects in 3D from a single image is a longstanding goal of computer vision with applications in robotics and AR/VR. For 2D recognition, large datasets and scalable solutions have led to unprecedented advances. In 3D, existing benchmarks are small in size and approaches specialize in few object categories and specific domains, e.g. urban driving scenes. Motivated by the success of 2D recognition, we revisit the task of 3D object detection by introducing a large benchmark, called Omni3D. Omni3D re-purposes and combines existing datasets resulting in 234k images annotated with more than 3 million instances and 97 categories.3D detection at such scale is challenging due to variations in camera intrinsics and the rich diversity of scene and object types. We propose a model, called Cube R-CNN, designed to generalize across camera and scene types with a unified approach. We show that Cube R-CNN outperforms prior works on the larger Omni3D and existing benchmarks. Finally, we prove that Omni3D is a powerful dataset for 3D object recognition, show that it improves single-dataset performance and can accelerate learning on new smaller datasets via pre-training.
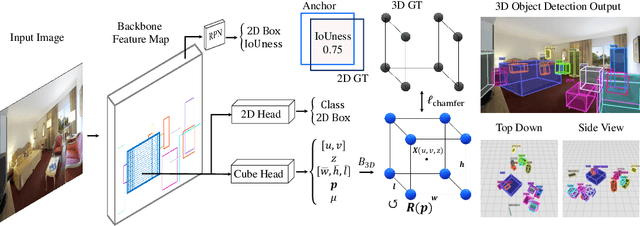
Learning 3D Object Shape and Layout without 3D Supervision
Jun 14, 2022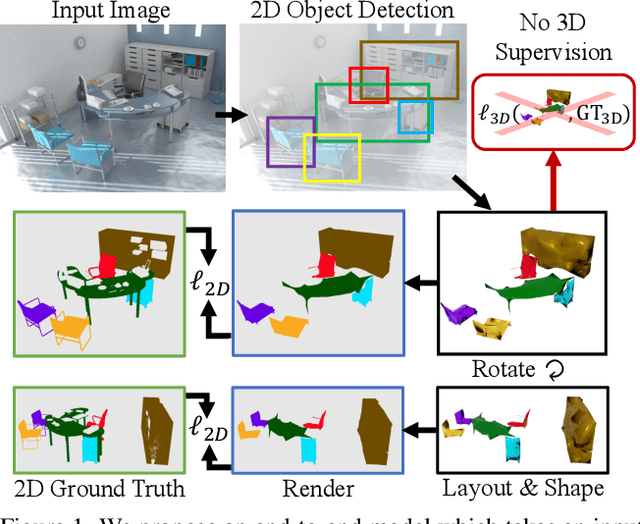
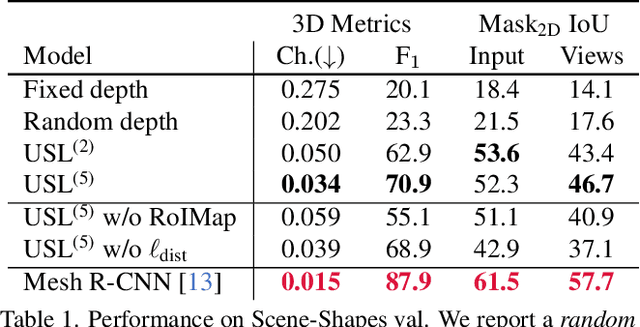

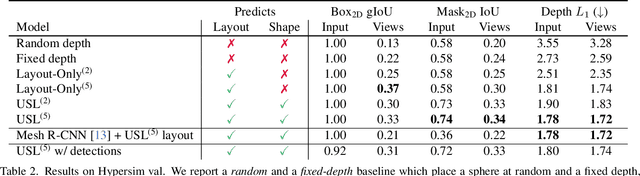
A 3D scene consists of a set of objects, each with a shape and a layout giving their position in space. Understanding 3D scenes from 2D images is an important goal, with applications in robotics and graphics. While there have been recent advances in predicting 3D shape and layout from a single image, most approaches rely on 3D ground truth for training which is expensive to collect at scale. We overcome these limitations and propose a method that learns to predict 3D shape and layout for objects without any ground truth shape or layout information: instead we rely on multi-view images with 2D supervision which can more easily be collected at scale. Through extensive experiments on 3D Warehouse, Hypersim, and ScanNet we demonstrate that our approach scales to large datasets of realistic images, and compares favorably to methods relying on 3D ground truth. On Hypersim and ScanNet where reliable 3D ground truth is not available, our approach outperforms supervised approaches trained on smaller and less diverse datasets.
Omnivore: A Single Model for Many Visual Modalities
Jan 20, 2022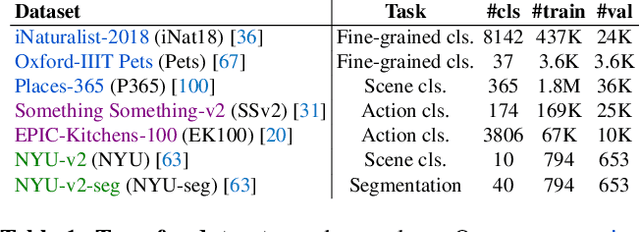
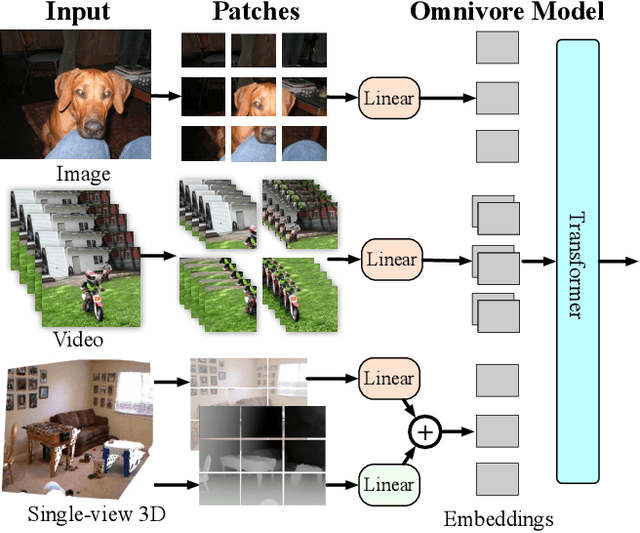
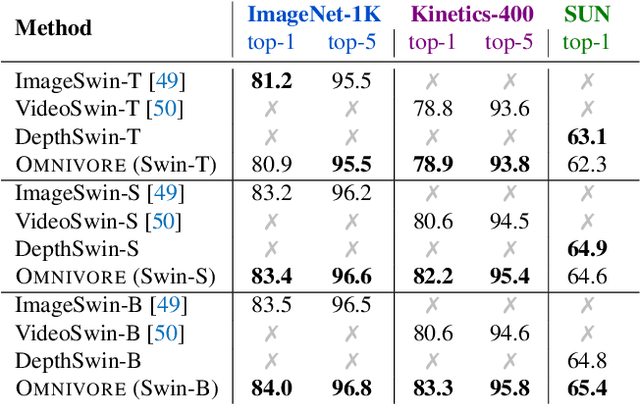
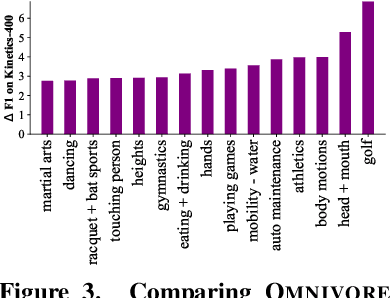
Prior work has studied different visual modalities in isolation and developed separate architectures for recognition of images, videos, and 3D data. Instead, in this paper, we propose a single model which excels at classifying images, videos, and single-view 3D data using exactly the same model parameters. Our 'Omnivore' model leverages the flexibility of transformer-based architectures and is trained jointly on classification tasks from different modalities. Omnivore is simple to train, uses off-the-shelf standard datasets, and performs at-par or better than modality-specific models of the same size. A single Omnivore model obtains 86.0% on ImageNet, 84.1% on Kinetics, and 67.1% on SUN RGB-D. After finetuning, our models outperform prior work on a variety of vision tasks and generalize across modalities. Omnivore's shared visual representation naturally enables cross-modal recognition without access to correspondences between modalities. We hope our results motivate researchers to model visual modalities together.