 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
A Systematic Examination of Preference Learning through the Lens of Instruction-Following
Dec 18, 2024Preference learning is a widely adopted post-training technique that aligns large language models (LLMs) to human preferences and improves specific downstream task capabilities. In this work we systematically investigate how specific attributes of preference datasets affect the alignment and downstream performance of LLMs in instruction-following tasks. We use a novel synthetic data generation pipeline to generate 48,000 unique instruction-following prompts with combinations of 23 verifiable constraints that enable fine-grained and automated quality assessments of model responses. With our synthetic prompts, we use two preference dataset curation methods - rejection sampling (RS) and Monte Carlo Tree Search (MCTS) - to obtain pairs of (chosen, rejected) responses. Then, we perform experiments investigating the effects of (1) the presence of shared prefixes between the chosen and rejected responses, (2) the contrast and quality of the chosen, rejected responses and (3) the complexity of the training prompts. Our experiments reveal that shared prefixes in preference pairs, as generated by MCTS, provide marginal but consistent improvements and greater stability across challenging training configurations. High-contrast preference pairs generally outperform low-contrast pairs; however, combining both often yields the best performance by balancing diversity and learning efficiency. Additionally, training on prompts of moderate difficulty leads to better generalization across tasks, even for more complex evaluation scenarios, compared to overly challenging prompts. Our findings provide actionable insights into optimizing preference data curation for instruction-following tasks, offering a scalable and effective framework for enhancing LLM training and alignment.
Self-Generated Critiques Boost Reward Modeling for Language Models
Nov 25, 2024



Reward modeling is crucial for aligning large language models (LLMs) with human preferences, especially in reinforcement learning from human feedback (RLHF). However, current reward models mainly produce scalar scores and struggle to incorporate critiques in a natural language format. We hypothesize that predicting both critiques and the scalar reward would improve reward modeling ability. Motivated by this, we propose Critic-RM, a framework that improves reward models using self-generated critiques without extra supervision. Critic-RM employs a two-stage process: generating and filtering high-quality critiques, followed by joint fine-tuning on reward prediction and critique generation. Experiments across benchmarks show that Critic-RM improves reward modeling accuracy by 3.7%-7.3% compared to standard reward models and LLM judges, demonstrating strong performance and data efficiency. Additional studies further validate the effectiveness of generated critiques in rectifying flawed reasoning steps with 2.5%-3.2% gains in improving reasoning accuracy.
Multi-IF: Benchmarking LLMs on Multi-Turn and Multilingual Instructions Following
Oct 21, 2024Large Language Models (LLMs) have demonstrated impressive capabilities in various tasks, including instruction following, which is crucial for aligning model outputs with user expectations. However, evaluating LLMs' ability to follow instructions remains challenging due to the complexity and subjectivity of human language. Current benchmarks primarily focus on single-turn, monolingual instructions, which do not adequately reflect the complexities of real-world applications that require handling multi-turn and multilingual interactions. To address this gap, we introduce Multi-IF, a new benchmark designed to assess LLMs' proficiency in following multi-turn and multilingual instructions. Multi-IF, which utilizes a hybrid framework combining LLM and human annotators, expands upon the IFEval by incorporating multi-turn sequences and translating the English prompts into another 7 languages, resulting in a dataset of 4,501 multilingual conversations, where each has three turns. Our evaluation of 14 state-of-the-art LLMs on Multi-IF reveals that it presents a significantly more challenging task than existing benchmarks. All the models tested showed a higher rate of failure in executing instructions correctly with each additional turn. For example, o1-preview drops from 0.877 at the first turn to 0.707 at the third turn in terms of average accuracy over all languages. Moreover, languages with non-Latin scripts (Hindi, Russian, and Chinese) generally exhibit higher error rates, suggesting potential limitations in the models' multilingual capabilities. We release Multi-IF prompts and the evaluation code base to encourage further research in this critical area.
Law of the Weakest Link: Cross Capabilities of Large Language Models
Sep 30, 2024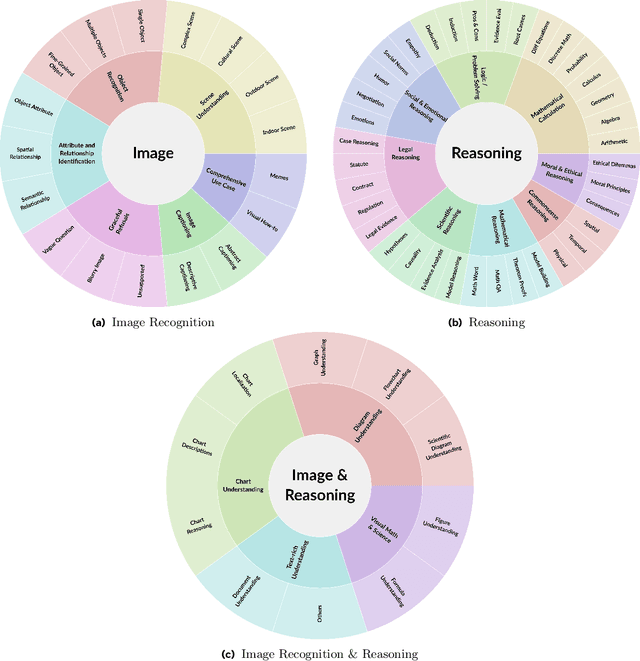
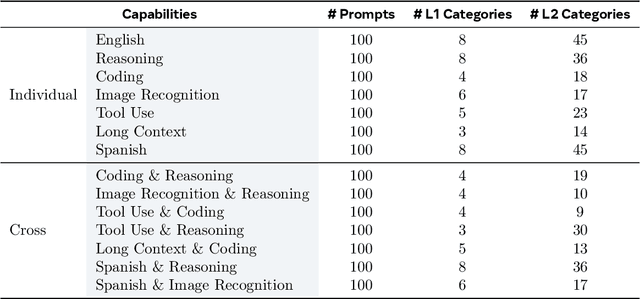
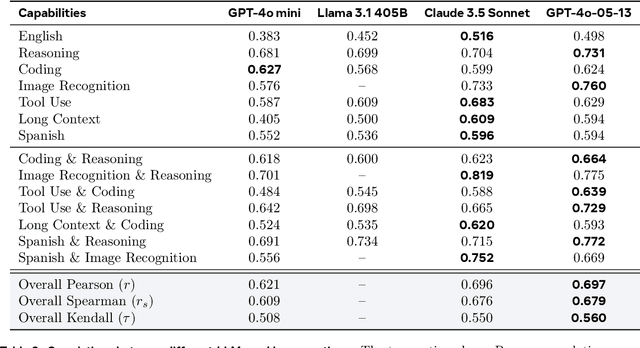
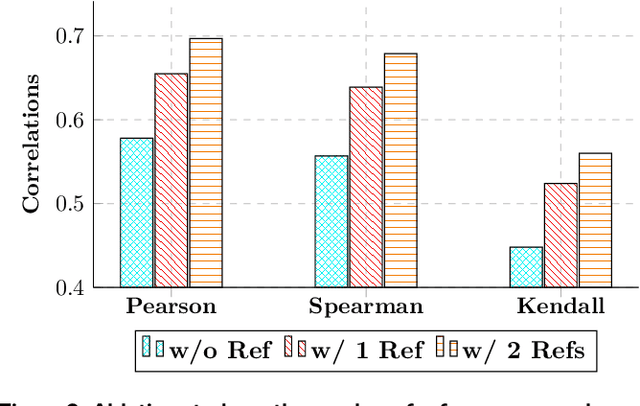
The development and evaluation of Large Language Models (LLMs) have largely focused on individual capabilities. However, this overlooks the intersection of multiple abilities across different types of expertise that are often required for real-world tasks, which we term cross capabilities. To systematically explore this concept, we first define seven core individual capabilities and then pair them to form seven common cross capabilities, each supported by a manually constructed taxonomy. Building on these definitions, we introduce CrossEval, a benchmark comprising 1,400 human-annotated prompts, with 100 prompts for each individual and cross capability. To ensure reliable evaluation, we involve expert annotators to assess 4,200 model responses, gathering 8,400 human ratings with detailed explanations to serve as reference examples. Our findings reveal that, in both static evaluations and attempts to enhance specific abilities, current LLMs consistently exhibit the "Law of the Weakest Link," where cross-capability performance is significantly constrained by the weakest component. Specifically, across 58 cross-capability scores from 17 models, 38 scores are lower than all individual capabilities, while 20 fall between strong and weak, but closer to the weaker ability. These results highlight the under-performance of LLMs in cross-capability tasks, making the identification and improvement of the weakest capabilities a critical priority for future research to optimize performance in complex, multi-dimensional scenarios.
The Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.
Llama 2: Open Foundation and Fine-Tuned Chat Models
Jul 19, 2023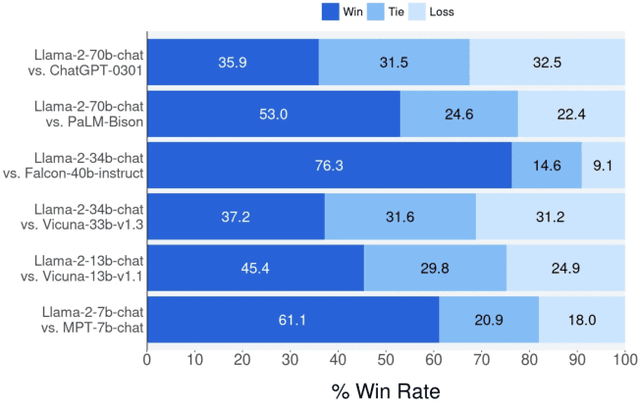
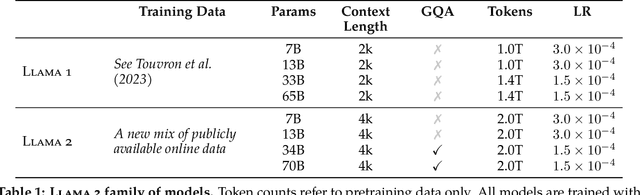
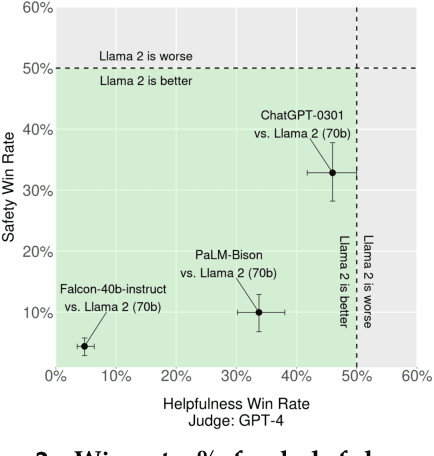
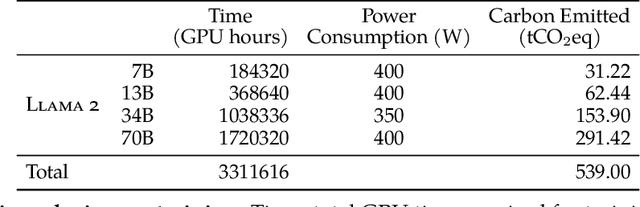
In this work, we develop and release Llama 2, a collection of pretrained and fine-tuned large language models (LLMs) ranging in scale from 7 billion to 70 billion parameters. Our fine-tuned LLMs, called Llama 2-Chat, are optimized for dialogue use cases. Our models outperform open-source chat models on most benchmarks we tested, and based on our human evaluations for helpfulness and safety, may be a suitable substitute for closed-source models. We provide a detailed description of our approach to fine-tuning and safety improvements of Llama 2-Chat in order to enable the community to build on our work and contribute to the responsible development of LLMs.
The HCI Aspects of Public Deployment of Research Chatbots: A User Study, Design Recommendations, and Open Challenges
Jun 07, 2023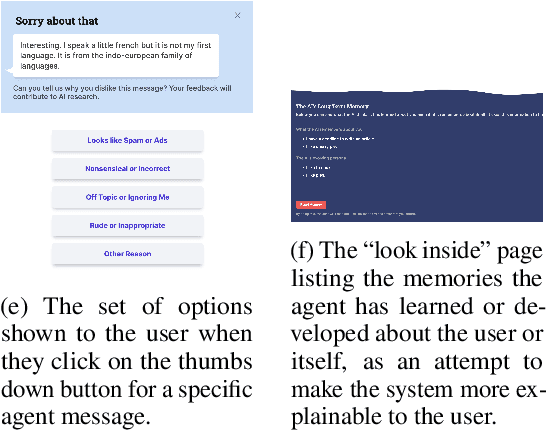
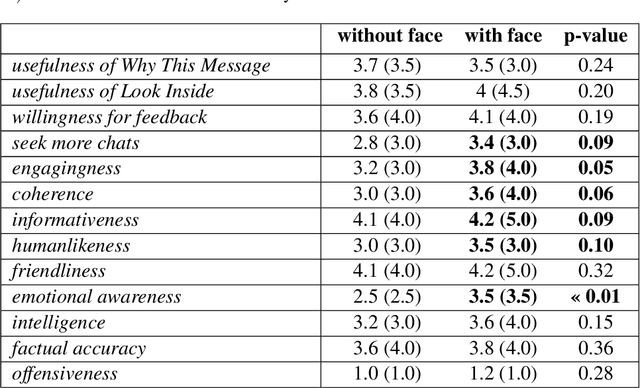
Publicly deploying research chatbots is a nuanced topic involving necessary risk-benefit analyses. While there have recently been frequent discussions on whether it is responsible to deploy such models, there has been far less focus on the interaction paradigms and design approaches that the resulting interfaces should adopt, in order to achieve their goals more effectively. We aim to pose, ground, and attempt to answer HCI questions involved in this scope, by reporting on a mixed-methods user study conducted on a recent research chatbot. We find that abstract anthropomorphic representation for the agent has a significant effect on user's perception, that offering AI explainability may have an impact on feedback rates, and that two (diegetic and extradiegetic) levels of the chat experience should be intentionally designed. We offer design recommendations and areas of further focus for the research community.
A Theory on Adam Instability in Large-Scale Machine Learning
Apr 25, 2023



We present a theory for the previously unexplained divergent behavior noticed in the training of large language models. We argue that the phenomenon is an artifact of the dominant optimization algorithm used for training, called Adam. We observe that Adam can enter a state in which the parameter update vector has a relatively large norm and is essentially uncorrelated with the direction of descent on the training loss landscape, leading to divergence. This artifact is more likely to be observed in the training of a deep model with a large batch size, which is the typical setting of large-scale language model training. To argue the theory, we present observations from the training runs of the language models of different scales: 7 billion, 30 billion, 65 billion, and 546 billion parameters.
BlenderBot 3: a deployed conversational agent that continually learns to responsibly engage
Aug 10, 2022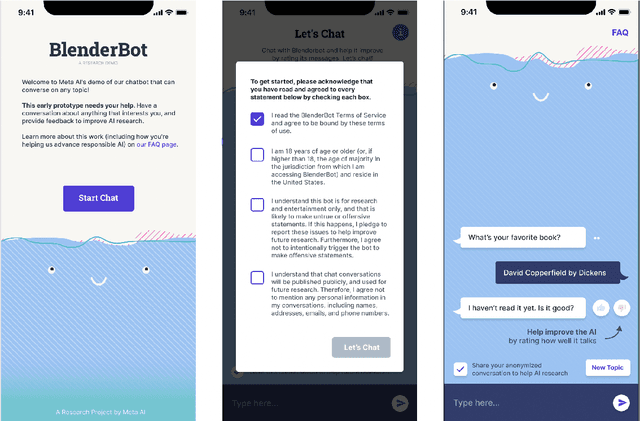
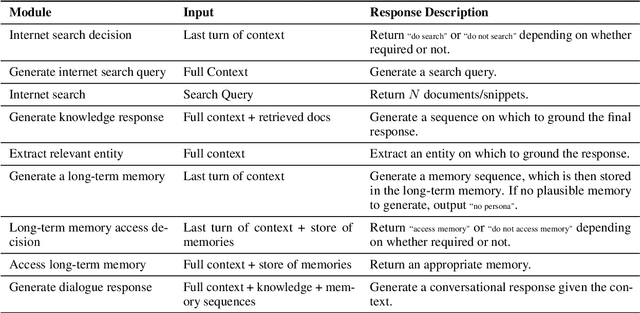
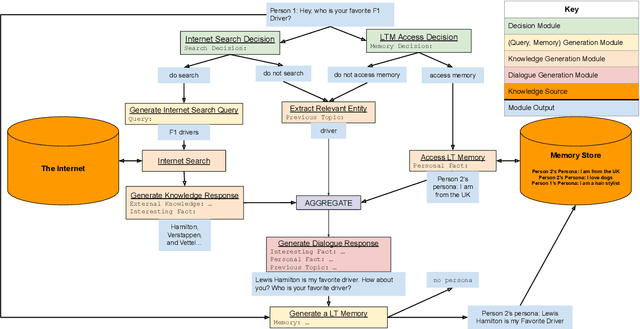
We present BlenderBot 3, a 175B parameter dialogue model capable of open-domain conversation with access to the internet and a long-term memory, and having been trained on a large number of user defined tasks. We release both the model weights and code, and have also deployed the model on a public web page to interact with organic users. This technical report describes how the model was built (architecture, model and training scheme), and details of its deployment, including safety mechanisms. Human evaluations show its superiority to existing open-domain dialogue agents, including its predecessors (Roller et al., 2021; Komeili et al., 2022). Finally, we detail our plan for continual learning using the data collected from deployment, which will also be publicly released. The goal of this research program is thus to enable the community to study ever-improving responsible agents that learn through interaction.