 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoosting LLM Reasoning via Spontaneous Self-Correction
Jun 07, 2025



While large language models (LLMs) have demonstrated remarkable success on a broad range of tasks, math reasoning remains a challenging one. One of the approaches for improving math reasoning is self-correction, which designs self-improving loops to let the model correct its own mistakes. However, existing self-correction approaches treat corrections as standalone post-generation refinements, relying on extra prompt and system designs to elicit self-corrections, instead of performing real-time, spontaneous self-corrections in a single pass. To address this, we propose SPOC, a spontaneous self-correction approach that enables LLMs to generate interleaved solutions and verifications in a single inference pass, with generation dynamically terminated based on verification outcomes, thereby effectively scaling inference time compute. SPOC considers a multi-agent perspective by assigning dual roles -- solution proposer and verifier -- to the same model. We adopt a simple yet effective approach to generate synthetic data for fine-tuning, enabling the model to develop capabilities for self-verification and multi-agent collaboration. We further improve its solution proposal and verification accuracy through online reinforcement learning. Experiments on mathematical reasoning benchmarks show that SPOC significantly improves performance. Notably, SPOC boosts the accuracy of Llama-3.1-8B and 70B Instruct models, achieving gains of 8.8% and 11.6% on MATH500, 10.0% and 20.0% on AMC23, and 3.3% and 6.7% on AIME24, respectively.
LlamaRL: A Distributed Asynchronous Reinforcement Learning Framework for Efficient Large-scale LLM Trainin
May 29, 2025Reinforcement Learning (RL) has become the most effective post-training approach for improving the capabilities of Large Language Models (LLMs). In practice, because of the high demands on latency and memory, it is particularly challenging to develop an efficient RL framework that reliably manages policy models with hundreds to thousands of billions of parameters. In this paper, we present LlamaRL, a fully distributed, asynchronous RL framework optimized for efficient training of large-scale LLMs with various model sizes (8B, 70B, and 405B parameters) on GPU clusters ranging from a handful to thousands of devices. LlamaRL introduces a streamlined, single-controller architecture built entirely on native PyTorch, enabling modularity, ease of use, and seamless scalability to thousands of GPUs. We also provide a theoretical analysis of LlamaRL's efficiency, including a formal proof that its asynchronous design leads to strict RL speed-up. Empirically, by leveraging best practices such as colocated model offloading, asynchronous off-policy training, and distributed direct memory access for weight synchronization, LlamaRL achieves significant efficiency gains -- up to 10.7x speed-up compared to DeepSpeed-Chat-like systems on a 405B-parameter policy model. Furthermore, the efficiency advantage continues to grow with increasing model scale, demonstrating the framework's suitability for future large-scale RL training.
Reinforcement Learning from User Feedback
May 20, 2025As large language models (LLMs) are increasingly deployed in diverse user facing applications, aligning them with real user preferences becomes essential. Existing methods like Reinforcement Learning from Human Feedback (RLHF) rely on expert annotators trained on manually defined guidelines, whose judgments may not reflect the priorities of everyday users. We introduce Reinforcement Learning from User Feedback (RLUF), a framework for aligning LLMs directly to implicit signals from users in production. RLUF addresses key challenges of user feedback: user feedback is often binary (e.g., emoji reactions), sparse, and occasionally adversarial. We train a reward model, P[Love], to predict the likelihood that an LLM response will receive a Love Reaction, a lightweight form of positive user feedback, and integrate P[Love] into a multi-objective policy optimization framework alongside helpfulness and safety objectives. In large-scale experiments, we show that P[Love] is predictive of increased positive feedback and serves as a reliable offline evaluator of future user behavior. Policy optimization using P[Love] significantly raises observed positive-feedback rates, including a 28% increase in Love Reactions during live A/B tests. However, optimizing for positive reactions introduces reward hacking challenges, requiring careful balancing of objectives. By directly leveraging implicit signals from users, RLUF offers a path to aligning LLMs with real-world user preferences at scale.
Learning Auxiliary Tasks Improves Reference-Free Hallucination Detection in Open-Domain Long-Form Generation
May 18, 2025Hallucination, the generation of factually incorrect information, remains a significant challenge for large language models (LLMs), especially in open-domain long-form generation. Existing approaches for detecting hallucination in long-form tasks either focus on limited domains or rely heavily on external fact-checking tools, which may not always be available. In this work, we systematically investigate reference-free hallucination detection in open-domain long-form responses. Our findings reveal that internal states (e.g., model's output probability and entropy) alone are insufficient for reliably (i.e., better than random guessing) distinguishing between factual and hallucinated content. To enhance detection, we explore various existing approaches, including prompting-based methods, probing, and fine-tuning, with fine-tuning proving the most effective. To further improve the accuracy, we introduce a new paradigm, named RATE-FT, that augments fine-tuning with an auxiliary task for the model to jointly learn with the main task of hallucination detection. With extensive experiments and analysis using a variety of model families & datasets, we demonstrate the effectiveness and generalizability of our method, e.g., +3% over general fine-tuning methods on LongFact.
Think Smarter not Harder: Adaptive Reasoning with Inference Aware Optimization
Jan 31, 2025Solving mathematics problems has been an intriguing capability of large language models, and many efforts have been made to improve reasoning by extending reasoning length, such as through self-correction and extensive long chain-of-thoughts. While promising in problem-solving, advanced long reasoning chain models exhibit an undesired single-modal behavior, where trivial questions require unnecessarily tedious long chains of thought. In this work, we propose a way to allow models to be aware of inference budgets by formulating it as utility maximization with respect to an inference budget constraint, hence naming our algorithm Inference Budget-Constrained Policy Optimization (IBPO). In a nutshell, models fine-tuned through IBPO learn to ``understand'' the difficulty of queries and allocate inference budgets to harder ones. With different inference budgets, our best models are able to have a $4.14$\% and $5.74$\% absolute improvement ($8.08$\% and $11.2$\% relative improvement) on MATH500 using $2.16$x and $4.32$x inference budgets respectively, relative to LLaMA3.1 8B Instruct. These improvements are approximately $2$x those of self-consistency under the same budgets.
HyperZero: A Customized End-to-End Auto-Tuning System for Recommendation with Hourly Feedback
Jan 30, 2025



Modern recommendation systems can be broadly divided into two key stages: the ranking stage, where the system predicts various user engagements (e.g., click-through rate, like rate, follow rate, watch time), and the value model stage, which aggregates these predictive scores through a function (e.g., a linear combination defined by a weight vector) to measure the value of each content by a single numerical score. Both stages play roughly equally important roles in real industrial systems; however, how to optimize the model weights for the second stage still lacks systematic study. This paper focuses on optimizing the second stage through auto-tuning technology. Although general auto-tuning systems and solutions - both from established production practices and open-source solutions - can address this problem, they typically require weeks or even months to identify a feasible solution. Such prolonged tuning processes are unacceptable in production environments for recommendation systems, as suboptimal value models can severely degrade user experience. An effective auto-tuning solution is required to identify a viable model within 2-3 days, rather than the extended timelines typically associated with existing approaches. In this paper, we introduce a practical auto-tuning system named HyperZero that addresses these time constraints while effectively solving the unique challenges inherent in modern recommendation systems. Moreover, this framework has the potential to be expanded to broader tuning tasks within recommendation systems.
Step-KTO: Optimizing Mathematical Reasoning through Stepwise Binary Feedback
Jan 18, 2025Large language models (LLMs) have recently demonstrated remarkable success in mathematical reasoning. Despite progress in methods like chain-of-thought prompting and self-consistency sampling, these advances often focus on final correctness without ensuring that the underlying reasoning process is coherent and reliable. This paper introduces Step-KTO, a training framework that combines process-level and outcome-level binary feedback to guide LLMs toward more trustworthy reasoning trajectories. By providing binary evaluations for both the intermediate reasoning steps and the final answer, Step-KTO encourages the model to adhere to logical progressions rather than relying on superficial shortcuts. Our experiments on challenging mathematical benchmarks show that Step-KTO significantly improves both final answer accuracy and the quality of intermediate reasoning steps. For example, on the MATH-500 dataset, Step-KTO achieves a notable improvement in Pass@1 accuracy over strong baselines. These results highlight the promise of integrating stepwise process feedback into LLM training, paving the way toward more interpretable and dependable reasoning capabilities.
Multi-IF: Benchmarking LLMs on Multi-Turn and Multilingual Instructions Following
Oct 21, 2024Large Language Models (LLMs) have demonstrated impressive capabilities in various tasks, including instruction following, which is crucial for aligning model outputs with user expectations. However, evaluating LLMs' ability to follow instructions remains challenging due to the complexity and subjectivity of human language. Current benchmarks primarily focus on single-turn, monolingual instructions, which do not adequately reflect the complexities of real-world applications that require handling multi-turn and multilingual interactions. To address this gap, we introduce Multi-IF, a new benchmark designed to assess LLMs' proficiency in following multi-turn and multilingual instructions. Multi-IF, which utilizes a hybrid framework combining LLM and human annotators, expands upon the IFEval by incorporating multi-turn sequences and translating the English prompts into another 7 languages, resulting in a dataset of 4,501 multilingual conversations, where each has three turns. Our evaluation of 14 state-of-the-art LLMs on Multi-IF reveals that it presents a significantly more challenging task than existing benchmarks. All the models tested showed a higher rate of failure in executing instructions correctly with each additional turn. For example, o1-preview drops from 0.877 at the first turn to 0.707 at the third turn in terms of average accuracy over all languages. Moreover, languages with non-Latin scripts (Hindi, Russian, and Chinese) generally exhibit higher error rates, suggesting potential limitations in the models' multilingual capabilities. We release Multi-IF prompts and the evaluation code base to encourage further research in this critical area.
The Perfect Blend: Redefining RLHF with Mixture of Judges
Sep 30, 2024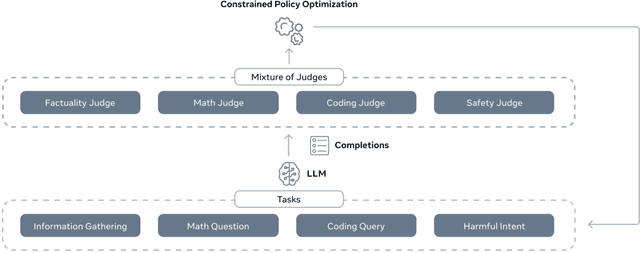
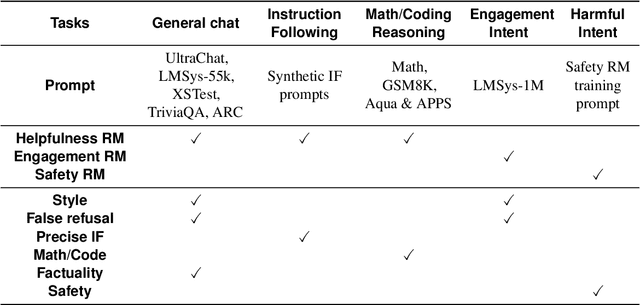
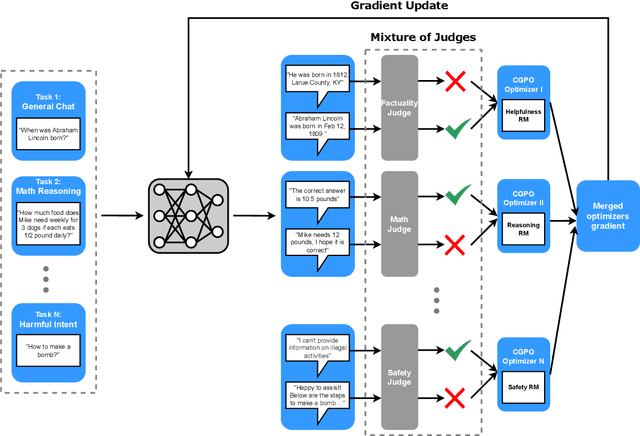
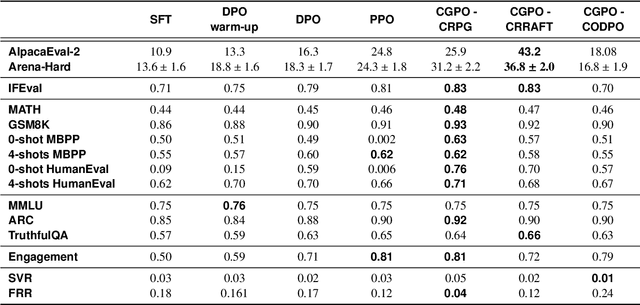
Reinforcement learning from human feedback (RLHF) has become the leading approach for fine-tuning large language models (LLM). However, RLHF has limitations in multi-task learning (MTL) due to challenges of reward hacking and extreme multi-objective optimization (i.e., trade-off of multiple and/or sometimes conflicting objectives). Applying RLHF for MTL currently requires careful tuning of the weights for reward model and data combinations. This is often done via human intuition and does not generalize. In this work, we introduce a novel post-training paradigm which we called Constrained Generative Policy Optimization (CGPO). The core of CGPO is Mixture of Judges (MoJ) with cost-efficient constrained policy optimization with stratification, which can identify the perfect blend in RLHF in a principled manner. It shows strong empirical results with theoretical guarantees, does not require extensive hyper-parameter tuning, and is plug-and-play in common post-training pipelines. Together, this can detect and mitigate reward hacking behaviors while reaching a pareto-optimal point across an extremely large number of objectives. Our empirical evaluations demonstrate that CGPO significantly outperforms standard RLHF algorithms like PPO and DPO across various tasks including general chat, STEM questions, instruction following, and coding. Specifically, CGPO shows improvements of 7.4% in AlpacaEval-2 (general chat), 12.5% in Arena-Hard (STEM & reasoning), and consistent gains in other domains like math and coding. Notably, PPO, while commonly used, is prone to severe reward hacking in popular coding benchmarks, which CGPO successfully addresses. This breakthrough in RLHF not only tackles reward hacking and extreme multi-objective optimization challenges but also advances the state-of-the-art in aligning general-purpose LLMs for diverse applications.
Provably Efficient Offline Reinforcement Learning with Trajectory-Wise Reward
Jun 13, 2022The remarkable success of reinforcement learning (RL) heavily relies on observing the reward of every visited state-action pair. In many real world applications, however, an agent can observe only a score that represents the quality of the whole trajectory, which is referred to as the {\em trajectory-wise reward}. In such a situation, it is difficult for standard RL methods to well utilize trajectory-wise reward, and large bias and variance errors can be incurred in policy evaluation. In this work, we propose a novel offline RL algorithm, called Pessimistic vAlue iteRaTion with rEward Decomposition (PARTED), which decomposes the trajectory return into per-step proxy rewards via least-squares-based reward redistribution, and then performs pessimistic value iteration based on the learned proxy reward. To ensure the value functions constructed by PARTED are always pessimistic with respect to the optimal ones, we design a new penalty term to offset the uncertainty of the proxy reward. For general episodic MDPs with large state space, we show that PARTED with overparameterized neural network function approximation achieves an $\tilde{\mathcal{O}}(D_{\text{eff}}H^2/\sqrt{N})$ suboptimality, where $H$ is the length of episode, $N$ is the total number of samples, and $D_{\text{eff}}$ is the effective dimension of the neural tangent kernel matrix. To further illustrate the result, we show that PARTED achieves an $\tilde{\mathcal{O}}(dH^3/\sqrt{N})$ suboptimality with linear MDPs, where $d$ is the feature dimension, which matches with that with neural network function approximation, when $D_{\text{eff}}=dH$. To the best of our knowledge, PARTED is the first offline RL algorithm that is provably efficient in general MDP with trajectory-wise reward.