 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAudiobox: Unified Audio Generation with Natural Language Prompts
Dec 25, 2023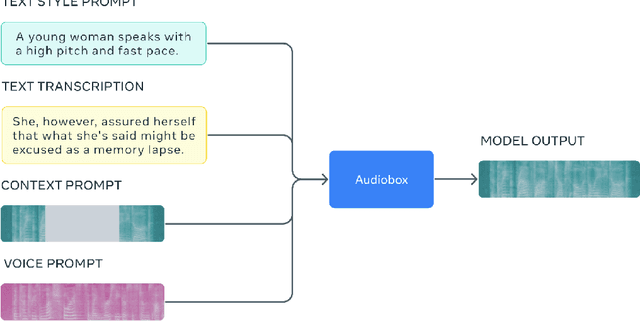

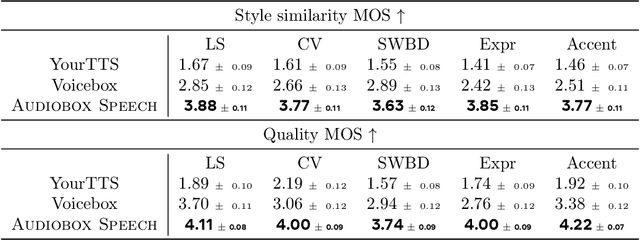
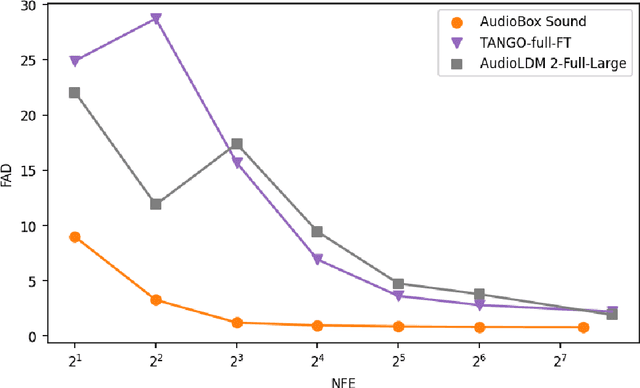
Audio is an essential part of our life, but creating it often requires expertise and is time-consuming. Research communities have made great progress over the past year advancing the performance of large scale audio generative models for a single modality (speech, sound, or music) through adopting more powerful generative models and scaling data. However, these models lack controllability in several aspects: speech generation models cannot synthesize novel styles based on text description and are limited on domain coverage such as outdoor environments; sound generation models only provide coarse-grained control based on descriptions like "a person speaking" and would only generate mumbling human voices. This paper presents Audiobox, a unified model based on flow-matching that is capable of generating various audio modalities. We design description-based and example-based prompting to enhance controllability and unify speech and sound generation paradigms. We allow transcript, vocal, and other audio styles to be controlled independently when generating speech. To improve model generalization with limited labels, we adapt a self-supervised infilling objective to pre-train on large quantities of unlabeled audio. Audiobox sets new benchmarks on speech and sound generation (0.745 similarity on Librispeech for zero-shot TTS; 0.77 FAD on AudioCaps for text-to-sound) and unlocks new methods for generating audio with novel vocal and acoustic styles. We further integrate Bespoke Solvers, which speeds up generation by over 25 times compared to the default ODE solver for flow-matching, without loss of performance on several tasks. Our demo is available at https://audiobox.metademolab.com/
Improving Open Language Models by Learning from Organic Interactions
Jun 07, 2023



We present BlenderBot 3x, an update on the conversational model BlenderBot 3, which is now trained using organic conversation and feedback data from participating users of the system in order to improve both its skills and safety. We are publicly releasing the participating de-identified interaction data for use by the research community, in order to spur further progress. Training models with organic data is challenging because interactions with people "in the wild" include both high quality conversations and feedback, as well as adversarial and toxic behavior. We study techniques that enable learning from helpful teachers while avoiding learning from people who are trying to trick the model into unhelpful or toxic responses. BlenderBot 3x is both preferred in conversation to BlenderBot 3, and is shown to produce safer responses in challenging situations. While our current models are still far from perfect, we believe further improvement can be achieved by continued use of the techniques explored in this work.
The HCI Aspects of Public Deployment of Research Chatbots: A User Study, Design Recommendations, and Open Challenges
Jun 07, 2023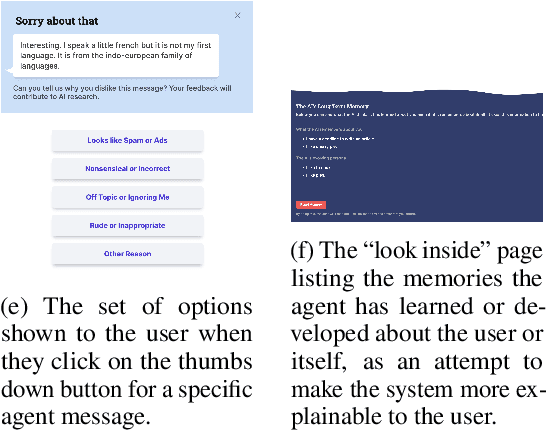
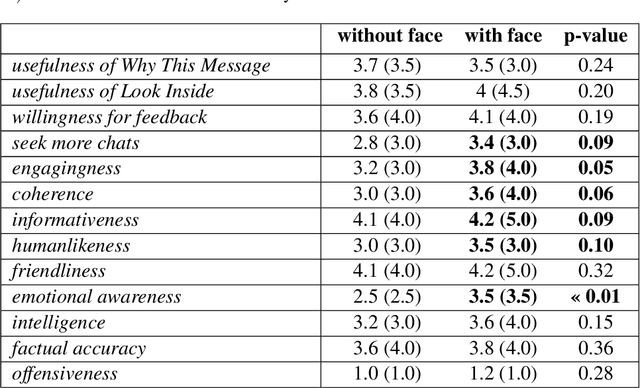
Publicly deploying research chatbots is a nuanced topic involving necessary risk-benefit analyses. While there have recently been frequent discussions on whether it is responsible to deploy such models, there has been far less focus on the interaction paradigms and design approaches that the resulting interfaces should adopt, in order to achieve their goals more effectively. We aim to pose, ground, and attempt to answer HCI questions involved in this scope, by reporting on a mixed-methods user study conducted on a recent research chatbot. We find that abstract anthropomorphic representation for the agent has a significant effect on user's perception, that offering AI explainability may have an impact on feedback rates, and that two (diegetic and extradiegetic) levels of the chat experience should be intentionally designed. We offer design recommendations and areas of further focus for the research community.
BlenderBot 3: a deployed conversational agent that continually learns to responsibly engage
Aug 10, 2022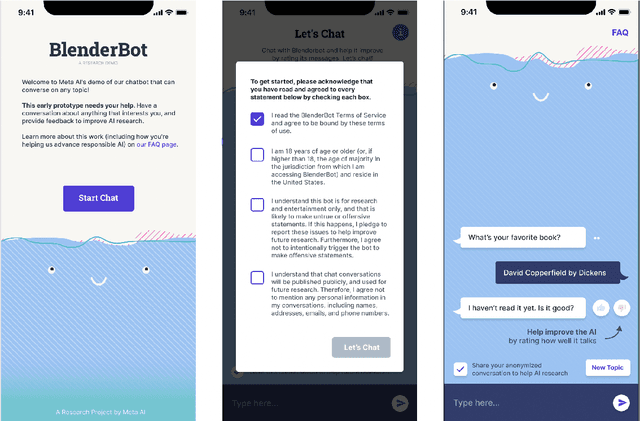
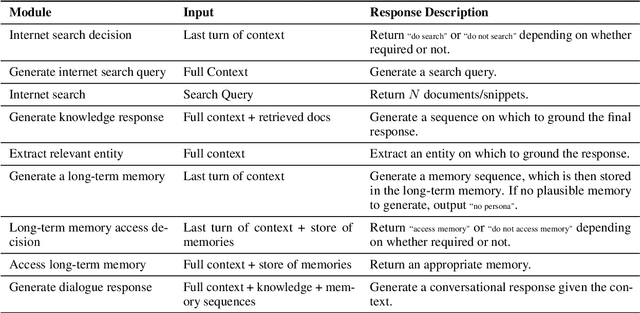
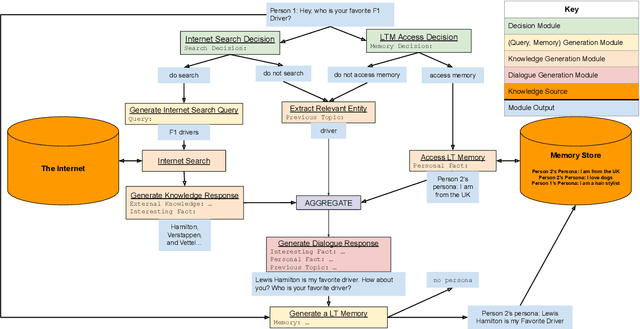
We present BlenderBot 3, a 175B parameter dialogue model capable of open-domain conversation with access to the internet and a long-term memory, and having been trained on a large number of user defined tasks. We release both the model weights and code, and have also deployed the model on a public web page to interact with organic users. This technical report describes how the model was built (architecture, model and training scheme), and details of its deployment, including safety mechanisms. Human evaluations show its superiority to existing open-domain dialogue agents, including its predecessors (Roller et al., 2021; Komeili et al., 2022). Finally, we detail our plan for continual learning using the data collected from deployment, which will also be publicly released. The goal of this research program is thus to enable the community to study ever-improving responsible agents that learn through interaction.