 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Improving Small Object Grounding in LVLMs
Jun 01, 2026Can internal attention patterns in Large Vision Language Models (LVLMs) identify reliable small-object boxes without fine-tuning? In this work, we provide an affirmative answer. Attention structure in LVLMs encodes grounding quality-a lightweight IoU regressor trained solely on attention maps achieves strong IoU prediction (Pearson r > 0.67). This regressor powers the regressor-based variant of our Attention-based Candidate Selection (ACS) framework, called ACS-Learned, which selects the best box from multiple sampled candidates to improve object grounding. By analyzing what the regressor learns, we reveal which transformer layers and heads are most critical and derive ACS-Free: a training-free selector that ranks candidates by attention entropy on these discriminative heads, with no learned component at inference. Experiments on COCO and Objects365 demonstrate up to 19% self-improvement on small object localization, with ACS-Free ranking best among all training-free methods, demonstrating that useful attention structure improves both localization reliability and interpretability in LVLMs.
TRON: Targeted Rule-Verifiable Online Environments for Visual Reasoning RL
Jun 01, 2026Reinforcement learning (RL) for visual reasoning needs scalable, verifiable, and controllable training signals. Existing visual RL post-training trains on static curated datasets, with fixed image-question-answer samples bounded by their collection budget. In this work, we introduce TRON (Targeted, Rule-verifiable Online eNvironments), an online environment substrate: a training rollout is generated on demand by a controllable generator-verifier program that samples a fresh latent visual state, renders an image, asks a question, and exactly verifies the answer. A single run can therefore draw an unbounded stream of fresh instances at the difficulty level required by the current curriculum. The current TRON suite contains 520 environments organized into five ability buckets (spatial, mathematical, diagram, pattern/logic, and counting); the same substrate supports both a single full model trained on all buckets and per-bucket ability-specialist models, with no additional data collection. We also introduce a substrate analysis covering generation reliability, instance and level diversity, cross-environment near-duplicates, and base-model pass rate by difficulty level. RL post-training with METHOD consistently improves performance on ten external multimodal reasoning benchmarks across Qwen3-VL-4B, Qwen2.5-VL-7B, and MiMo-VL-7B-SFT.
OUSAC: Optimized Guidance Scheduling with Adaptive Caching for DiT Acceleration
Dec 16, 2025



Diffusion models have emerged as the dominant paradigm for high-quality image generation, yet their computational expense remains substantial due to iterative denoising. Classifier-Free Guidance (CFG) significantly enhances generation quality and controllability but doubles the computation by requiring both conditional and unconditional forward passes at every timestep. We present OUSAC (Optimized gUidance Scheduling with Adaptive Caching), a framework that accelerates diffusion transformers (DiT) through systematic optimization. Our key insight is that variable guidance scales enable sparse computation: adjusting scales at certain timesteps can compensate for skipping CFG at others, enabling both fewer total sampling steps and fewer CFG steps while maintaining quality. However, variable guidance patterns introduce denoising deviations that undermine standard caching methods, which assume constant CFG scales across steps. Moreover, different transformer blocks are affected at different levels under dynamic conditions. This paper develops a two-stage approach leveraging these insights. Stage-1 employs evolutionary algorithms to jointly optimize which timesteps to skip and what guidance scale to use, eliminating up to 82% of unconditional passes. Stage-2 introduces adaptive rank allocation that tailors calibration efforts per transformer block, maintaining caching effectiveness under variable guidance. Experiments demonstrate that OUSAC significantly outperforms state-of-the-art acceleration methods, achieving 53% computational savings with 15% quality improvement on DiT-XL/2 (ImageNet 512x512), 60% savings with 16.1% improvement on PixArt-alpha (MSCOCO), and 5x speedup on FLUX while improving CLIP Score over the 50-step baseline.
ZooplanktonBench: A Geo-Aware Zooplankton Recognition and Classification Dataset from Marine Observations
May 24, 2025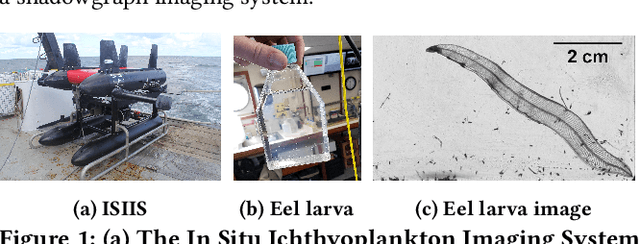



Plankton are small drifting organisms found throughout the world's oceans. One component of this plankton community is the zooplankton, which includes gelatinous animals and crustaceans (e.g. shrimp), as well as the early life stages (i.e., eggs and larvae) of many commercially important fishes. Being able to monitor zooplankton abundances accurately and understand how populations change in relation to ocean conditions is invaluable to marine science research, with important implications for future marine seafood productivity. While new imaging technologies generate massive amounts of video data of zooplankton, analyzing them using general-purpose computer vision tools developed for general objects turns out to be highly challenging due to the high similarity in appearance between the zooplankton and its background (e.g., marine snow). In this work, we present the ZooplanktonBench, a benchmark dataset containing images and videos of zooplankton associated with rich geospatial metadata (e.g., geographic coordinates, depth, etc.) in various water ecosystems. ZooplanktonBench defines a collection of tasks to detect, classify, and track zooplankton in challenging settings, including highly cluttered environments, living vs non-living classification, objects with similar shapes, and relatively small objects. Our dataset presents unique challenges and opportunities for state-of-the-art computer vision systems to evolve and improve visual understanding in a dynamic environment with huge variations and be geo-aware.
Enhancing Cognition and Explainability of Multimodal Foundation Models with Self-Synthesized Data
Feb 19, 2025Large multimodal models (LMMs) have shown impressive capabilities in a wide range of visual tasks. However, they often struggle with fine-grained visual reasoning, failing to identify domain-specific objectives and provide justifiable explanations for their predictions. To address this, we propose a novel visual rejection sampling framework to improve the cognition and explainability of LMMs using self-synthesized data. Specifically, visual fine-tuning requires images, queries, and target answers. Our approach begins by synthesizing interpretable answers that include human-verifiable visual features. These features are based on expert-defined concepts, carefully selected based on their alignment with the image content. After each round of fine-tuning, we apply a reward model-free filtering mechanism to select the highest-quality interpretable answers for the next round of tuning. This iterative process of data synthesis and fine-tuning progressively improves the model's ability to generate accurate and reasonable explanations. Experimental results demonstrate the effectiveness of our method in improving both the accuracy and explainability of specialized visual classification tasks.
A Benchmark Dataset for Multimodal Prediction of Enzymatic Function Coupling DNA Sequences and Natural Language
Jul 21, 2024



Predicting gene function from its DNA sequence is a fundamental challenge in biology. Many deep learning models have been proposed to embed DNA sequences and predict their enzymatic function, leveraging information in public databases linking DNA sequences to an enzymatic function label. However, much of the scientific community's knowledge of biological function is not represented in these categorical labels, and is instead captured in unstructured text descriptions of mechanisms, reactions, and enzyme behavior. These descriptions are often captured alongside DNA sequences in biological databases, albeit in an unstructured manner. Deep learning of models predicting enzymatic function are likely to benefit from incorporating this multi-modal data encoding scientific knowledge of biological function. There is, however, no dataset designed for machine learning algorithms to leverage this multi-modal information. Here we propose a novel dataset and benchmark suite that enables the exploration and development of large multi-modal neural network models on gene DNA sequences and natural language descriptions of gene function. We present baseline performance on benchmarks for both unsupervised and supervised tasks that demonstrate the difficulty of this modeling objective, while demonstrating the potential benefit of incorporating multi-modal data types in function prediction compared to DNA sequences alone. Our dataset is at: https://hoarfrost-lab.github.io/BioTalk/.
Neural Gaffer: Relighting Any Object via Diffusion
Jun 11, 2024



Single-image relighting is a challenging task that involves reasoning about the complex interplay between geometry, materials, and lighting. Many prior methods either support only specific categories of images, such as portraits, or require special capture conditions, like using a flashlight. Alternatively, some methods explicitly decompose a scene into intrinsic components, such as normals and BRDFs, which can be inaccurate or under-expressive. In this work, we propose a novel end-to-end 2D relighting diffusion model, called Neural Gaffer, that takes a single image of any object and can synthesize an accurate, high-quality relit image under any novel environmental lighting condition, simply by conditioning an image generator on a target environment map, without an explicit scene decomposition. Our method builds on a pre-trained diffusion model, and fine-tunes it on a synthetic relighting dataset, revealing and harnessing the inherent understanding of lighting present in the diffusion model. We evaluate our model on both synthetic and in-the-wild Internet imagery and demonstrate its advantages in terms of generalization and accuracy. Moreover, by combining with other generative methods, our model enables many downstream 2D tasks, such as text-based relighting and object insertion. Our model can also operate as a strong relighting prior for 3D tasks, such as relighting a radiance field.
ALDM-Grasping: Diffusion-aided Zero-Shot Sim-to-Real Transfer for Robot Grasping
Mar 18, 2024



To tackle the "reality gap" encountered in Sim-to-Real transfer, this study proposes a diffusion-based framework that minimizes inconsistencies in grasping actions between the simulation settings and realistic environments. The process begins by training an adversarial supervision layout-to-image diffusion model(ALDM). Then, leverage the ALDM approach to enhance the simulation environment, rendering it with photorealistic fidelity, thereby optimizing robotic grasp task training. Experimental results indicate this framework outperforms existing models in both success rates and adaptability to new environments through improvements in the accuracy and reliability of visual grasping actions under a variety of conditions. Specifically, it achieves a 75\% success rate in grasping tasks under plain backgrounds and maintains a 65\% success rate in more complex scenarios. This performance demonstrates this framework excels at generating controlled image content based on text descriptions, identifying object grasp points, and demonstrating zero-shot learning in complex, unseen scenarios.
MVSA-Net: Multi-View State-Action Recognition for Robust and Deployable Trajectory Generation
Nov 18, 2023The learn-from-observation (LfO) paradigm is a human-inspired mode for a robot to learn to perform a task simply by watching it being performed. LfO can facilitate robot integration on factory floors by minimizing disruption and reducing tedious programming. A key component of the LfO pipeline is a transformation of the depth camera frames to the corresponding task state and action pairs, which are then relayed to learning techniques such as imitation or inverse reinforcement learning for understanding the task parameters. While several existing computer vision models analyze videos for activity recognition, SA-Net specifically targets robotic LfO from RGB-D data. However, SA-Net and many other models analyze frame data captured from a single viewpoint. Their analysis is therefore highly sensitive to occlusions of the observed task, which are frequent in deployments. An obvious way of reducing occlusions is to simultaneously observe the task from multiple viewpoints and synchronously fuse the multiple streams in the model. Toward this, we present multi-view SA-Net, which generalizes the SA-Net model to allow the perception of multiple viewpoints of the task activity, integrate them, and better recognize the state and action in each frame. Performance evaluations on two distinct domains establish that MVSA-Net recognizes the state-action pairs under occlusion more accurately compared to single-view MVSA-Net and other baselines. Our ablation studies further evaluate its performance under different ambient conditions and establish the contribution of the architecture components. As such, MVSA-Net offers a significantly more robust and deployable state-action trajectory generation compared to previous methods.
Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications
Oct 12, 2023Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency.