 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRF-PGS: Fully-structured Spatial Wireless Channel Representation with Planar Gaussian Splatting
Aug 23, 2025In the 6G era, the demand for higher system throughput and the implementation of emerging 6G technologies require large-scale antenna arrays and accurate spatial channel state information (Spatial-CSI). Traditional channel modeling approaches, such as empirical models, ray tracing, and measurement-based methods, face challenges in spatial resolution, efficiency, and scalability. Radiance field-based methods have emerged as promising alternatives but still suffer from geometric inaccuracy and costly supervision. This paper proposes RF-PGS, a novel framework that reconstructs high-fidelity radio propagation paths from only sparse path loss spectra. By introducing Planar Gaussians as geometry primitives with certain RF-specific optimizations, RF-PGS achieves dense, surface-aligned scene reconstruction in the first geometry training stage. In the subsequent Radio Frequency (RF) training stage, the proposed fully-structured radio radiance, combined with a tailored multi-view loss, accurately models radio propagation behavior. Compared to prior radiance field methods, RF-PGS significantly improves reconstruction accuracy, reduces training costs, and enables efficient representation of wireless channels, offering a practical solution for scalable 6G Spatial-CSI modeling.
Collection: Datasets from AFAR Challenge
May 11, 2025



This paper presents a comprehensive real-world and Digital Twin (DT) dataset collected as part of the Find A Rover (AFAR) Challenge, organized by the NSF Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) testbed and hosted at the Lake Wheeler Field in Raleigh, North Carolina. The AFAR Challenge was a competition involving five finalist university teams, focused on promoting innovation in UAV-assisted radio frequency (RF) source localization. Participating teams were tasked with designing UAV flight trajectories and localization algorithms to detect the position of a hidden unmanned ground vehicle (UGV), also referred to as a rover, emitting wireless probe signals generated by GNU Radio. The competition was structured to evaluate solutions in a DT environment first, followed by deployment and testing in AERPAW's outdoor wireless testbed. For each team, the UGV was placed at three different positions, resulting in a total of 30 datasets, 15 collected in a DT simulation environment and 15 in a physical outdoor testbed. Each dataset contains time-synchronized measurements of received signal strength (RSS), received signal quality (RSQ), GPS coordinates, UAV velocity, and UAV orientation (roll, pitch, and yaw). Data is organized into structured folders by team, environment (DT and real-world), and UGV location. The dataset supports research in UAV-assisted RF source localization, air-to-ground (A2G) wireless propagation modeling, trajectory optimization, signal prediction, autonomous navigation, and DT validation. With approximately 300k time-synchronized samples collected from real-world experiments, the dataset provides a substantial foundation for training and evaluating deep learning (DL) models. Overall, the AFAR dataset serves as a valuable resource for advancing robust, real-world solutions in UAV-enabled wireless communications and sensing systems.
Terahertz Spatial Wireless Channel Modeling with Radio Radiance Field
May 06, 2025Terahertz (THz) communication is a key enabler for 6G systems, offering ultra-wide bandwidth and unprecedented data rates. However, THz signal propagation differs significantly from lower-frequency bands due to severe free space path loss, minimal diffraction and specular reflection, and prominent scattering, making conventional channel modeling and pilot-based estimation approaches inefficient. In this work, we investigate the feasibility of applying radio radiance field (RRF) framework to the THz band. This method reconstructs a continuous RRF using visual-based geometry and sparse THz RF measurements, enabling efficient spatial channel state information (Spatial-CSI) modeling without dense sampling. We first build a fine simulated THz scenario, then we reconstruct the RRF and evaluate the performance in terms of both reconstruction quality and effectiveness in THz communication, showing that the reconstructed RRF captures key propagation paths with sparse training samples. Our findings demonstrate that RRF modeling remains effective in the THz regime and provides a promising direction for scalable, low-cost spatial channel reconstruction in future 6G networks.
Autonomous Agricultural Monitoring with Aerial Drones and RF Energy-Harvesting Sensor Tags
Feb 22, 2025



In precision agriculture and plant science, there is an increasing demand for wireless sensors that are easy to deploy, maintain, and monitor. This paper investigates a novel approach that leverages recent advances in extremely low-power wireless communication and sensing, as well as the rapidly increasing availability of unmanned aerial vehicle (UAV) platforms. By mounting a specialized wireless payload on a UAV, battery-less sensor tags can harvest wireless beacon signals emitted from the drone, dramatically reducing the cost per sensor. These tags can measure environmental information such as temperature and humidity, then encrypt and transmit the data in the range of several meters. An experimental implementation was constructed at AERPAW, an NSF-funded wireless aerial drone research platform. While ground-based tests confirmed reliable sensor operation and data collection, airborne trials encountered wireless interference that impeded successfully detecting tag data. Despite these challenges, our results suggest further refinements could improve reliability and advance precision agriculture and agrarian research.
Optimizing Wireless Resource Management and Synchronization in Digital Twin Networks
Feb 07, 2025In this paper, we investigate an accurate synchronization between a physical network and its digital network twin (DNT), which serves as a virtual representation of the physical network. The considered network includes a set of base stations (BSs) that must allocate its limited spectrum resources to serve a set of users while also transmitting its partially observed physical network information to a cloud server to generate the DNT. Since the DNT can predict the physical network status based on its historical status, the BSs may not need to send their physical network information at each time slot, allowing them to conserve spectrum resources to serve the users. However, if the DNT does not receive the physical network information of the BSs over a large time period, the DNT's accuracy in representing the physical network may degrade. To this end, each BS must decide when to send the physical network information to the cloud server to update the DNT, while also determining the spectrum resource allocation policy for both DNT synchronization and serving the users. We formulate this resource allocation task as an optimization problem, aiming to maximize the total data rate of all users while minimizing the asynchronization between the physical network and the DNT. To address this problem, we propose a method based on the GRUs and the value decomposition network (VDN). Simulation results show that our GRU and VDN based algorithm improves the weighted sum of data rates and the similarity between the status of the DNT and the physical network by up to 28.96%, compared to a baseline method combining GRU with the independent Q learning.
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Aug 06, 2024Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Narrowband, Fast, and Autonomous Drone Radio Mapping for Localization
Jul 17, 2024This paper explores how a flying drone can autonomously navigate while constructing a narrowband radio map for signal localization. As flying drones become more ubiquitous, their wireless signals will necessitate new wireless technologies and algorithms to provide robust radio infrastructure while preserving radio spectrum usage. A potential solution for this spectrum-sharing localization challenge is to limit the bandwidth of any transmitter beacon. However, location signaling with a narrow bandwidth necessitates improving a wireless aerial system's ability to filter a noisy signal, estimate the transmitter's location, and self-pilot toward the beacon signal. By showing results through simulation, emulation, and a final drone flight experiment, this work provides an algorithm using a Gaussian process for radio signal estimation and Bayesian optimization for drone automatic guidance. This research supports advanced radio and aerial robotics applications in critical areas such as search-and-rescue, last-mile delivery, and large-scale platform digital twin development.
A UAV-assisted Wireless Localization Challenge on AERPAW
Jul 16, 2024
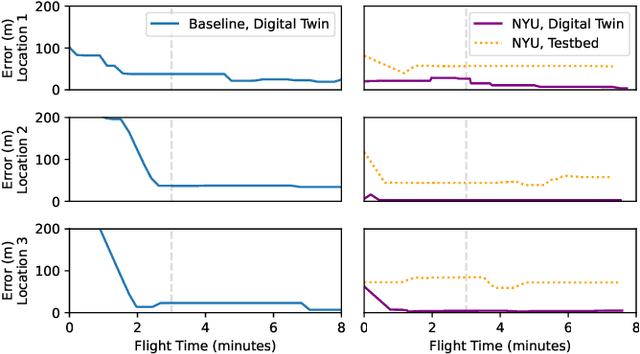
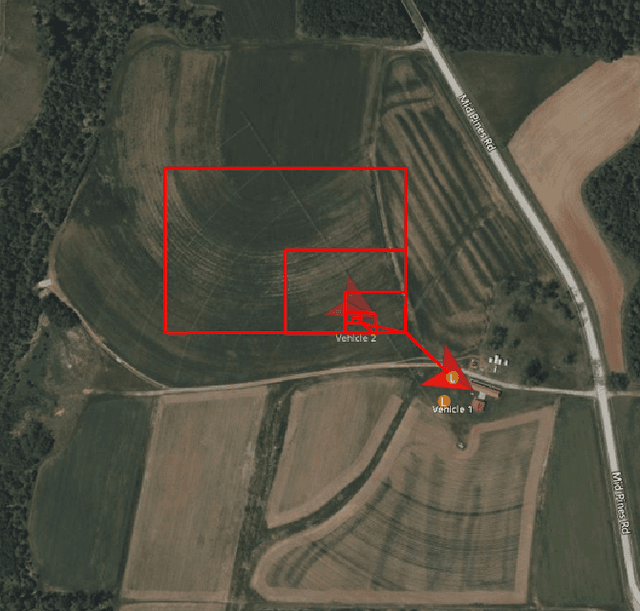

As wireless researchers are tasked to enable wireless communication as infrastructure in more dynamic aerial settings, there is a growing need for large-scale experimental platforms that provide realistic, reproducible, and reliable experimental validation. To bridge the research-to-implementation gap, the Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) offers open-source tools, reference experiments, and hardware to facilitate and evaluate the development of wireless research in controlled digital twin environments and live testbed flights. The inaugural AERPAW Challenge, "Find a Rover," was issued to spark collaborative efforts and test the platform's capabilities. The task involved localizing a narrowband wireless signal, with teams given ten minutes to find the "rover" within a twenty-acre area. By engaging in this exercise, researchers can validate the platform's value as a tool for innovation in wireless communications research within aerial robotics. This paper recounts the methods and experiences of the top three teams in automating and rapidly locating a wireless signal by automating and controlling an aerial drone in a realistic testbed scenario.
Model-based Deep Learning for Rate Split Multiple Access in Vehicular Communications
May 02, 2024



Rate split multiple access (RSMA) has been proven as an effective communication scheme for 5G and beyond, especially in vehicular scenarios. However, RSMA requires complicated iterative algorithms for proper resource allocation, which cannot fulfill the stringent latency requirement in resource constrained vehicles. Although data driven approaches can alleviate this issue, they suffer from poor generalizability and scarce training data. In this paper, we propose a fractional programming (FP) based deep unfolding (DU) approach to address resource allocation problem for a weighted sum rate optimization in RSMA. By carefully designing the penalty function, we couple the variable update with projected gradient descent algorithm (PGD). Following the structure of PGD, we embed few learnable parameters in each layer of the DU network. Through extensive simulation, we have shown that the proposed model-based neural networks has similar performance as optimal results given by traditional algorithm but with much lower computational complexity, less training data, and higher resilience to test set data and out-of-distribution (OOD) data.
Exploring Communication Technologies, Standards, and Challenges in Electrified Vehicle Charging
Mar 25, 2024

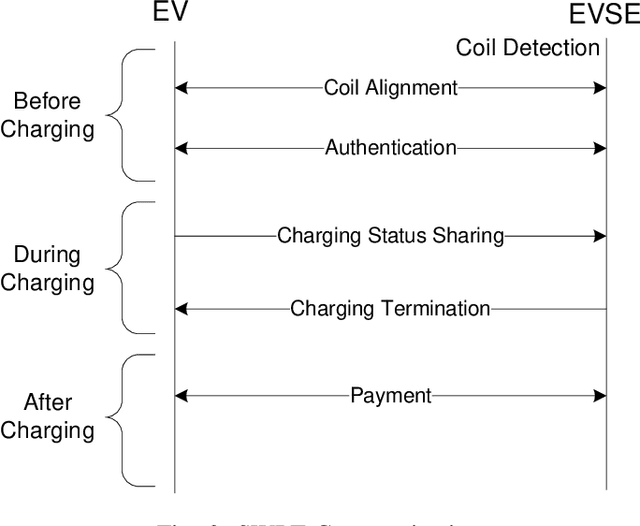
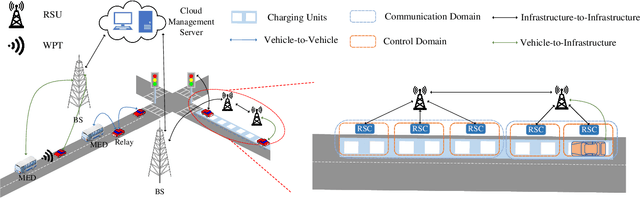
As public awareness of environmental protection continues to grow, the trend of integrating more electric vehicles (EVs) into the transportation sector is rising. Unlike conventional internal combustion engine (ICE) vehicles, EVs can minimize carbon emissions and potentially achieve autonomous driving. However, several obstacles hinder the widespread adoption of EVs, such as their constrained driving range and the extended time required for charging. One alternative solution to address these challenges is implementing dynamic wireless power transfer (DWPT), charging EVs in motion on the road. Moreover, charging stations with static wireless power transfer (SWPT) infrastructure can replace existing gas stations, enabling users to charge EVs in parking lots or at home. This paper surveys the communication infrastructure for static and dynamic wireless charging in electric vehicles. It encompasses all communication aspects involved in the wireless charging process. The architecture and communication requirements for static and dynamic wireless charging are presented separately. Additionally, a comprehensive comparison of existing communication standards is provided. The communication with the grid is also explored in detail. The survey gives attention to security and privacy issues arising during communications. In summary, the paper addresses the challenges and outlines upcoming trends in communication for EV wireless charging.