 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Aug 06, 2024Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure
Nov 16, 2023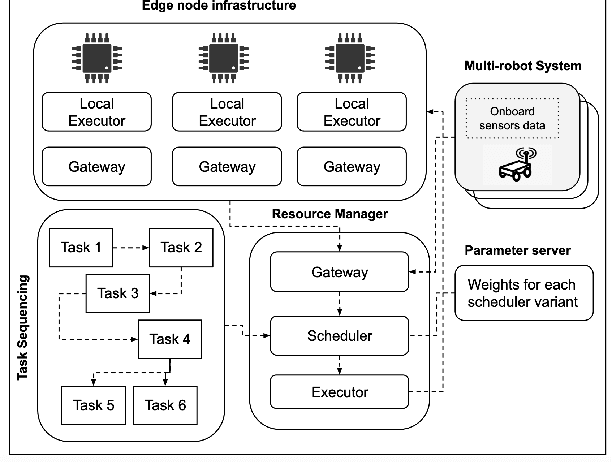
To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency.
Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks
Nov 16, 2023We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems.
Mobile Robot Control and Autonomy Through Collaborative Simulation Twin
Mar 10, 2023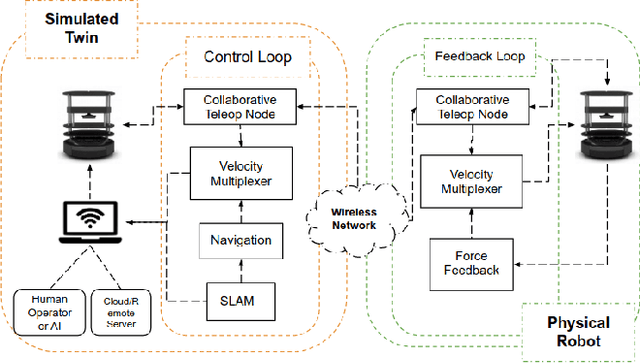
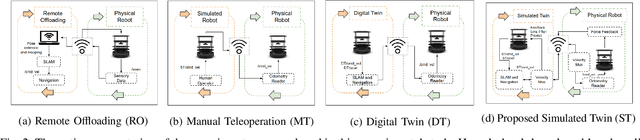
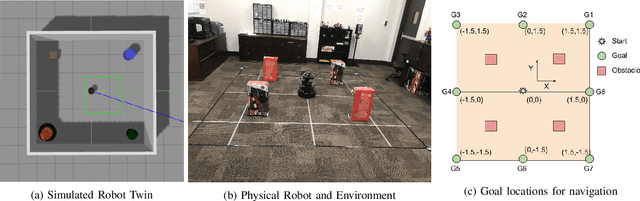
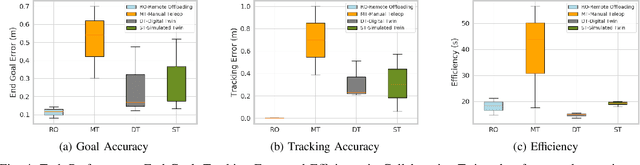
When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. This paper introduces a novel collaborative Simulation Twin (ST) strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaborative twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by ST's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing (or offloading), and digital twin approaches.
Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots
Oct 29, 2022Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes.