 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAir-to-Air Channel Characterization for UAV Communications at 3.4 GHz
Apr 02, 2026Uncrewed Aerial Vehicle (UAV) networks require accurate Air-to-Air (A2A) channel models, but most existing work focuses on Air-to-Ground links and leaves the sub-6 GHz A2A channel poorly characterized. We present preliminary 3.4 GHz A2A channel measurements collected with a lightweight, reconfigurable, open-source channel sounder built from USRP B210 software-defined radios and a high-precision GNSS-disciplined oscillator mounted on two UAVs. Measurements were conducted at the AERPAW Lake Wheeler testbed using a spherical flight trajectory around a second drone to capture channel behavior over varying altitudes, elevation angles, and relative headings. From these data, we analyze fundamental channel properties, extract channel impulse responses, model fading behavior as a function of link geometry, and characterize fading statistics including RMS delay spread. The resulting dataset and analysis provide a more realistic basis for the design, emulation, and evaluation of physical-layer and MAC protocols for next-generation UAV communication networks.
Height-Dependent Spectrum Activity Measurements and Modeling: A Case Study with FM Radio Bands
Feb 24, 2026The increasing demand for wireless connectivity necessitates advanced spectrum modeling to enable efficient spectrum sharing for next-generation aerial communications. While traditional models often overlook vertical variations in signal behavior, this paper proposes a height-dependent propagation model using a helikite-mounted software-defined radio (SDR). We collected extensive measurement data across the 88 MHz to 6 GHz range in both urban and rural environments. As a case study to validate our methodology, we focus on the FM radio band, which allows us to use publicly available transmitter locations and transmit power levels to facilitate comparisons between analytical with measurement results. We identify a clear transition from non-line-of-sight (NLoS) to line-of-sight (LoS) regimes at a specific altitude threshold and propose an altitude-dependent path loss model that incorporates this transition. Our results demonstrate that the proposed model significantly outperforms the standard free space path loss (FSPL) model in complex urban topologies, providing a more accurate framework for altitude-aware spectrum prediction and management across emerging aerial wireless technologies and bands.
TransfoREM: Transformer aided 3D Radio Environment Mapping
Jan 23, 2026Providing reliable cellular connectivity to Unmanned Aerial Vehicles (UAV) is a key challenge, as existing terrestrial networks are deployed mainly for ground-level coverage. The cellular network coverage may be available for a limited range from the antenna side lobes, with poor connectivity further exacerbated by UAV flight dynamics. In this work, we propose TransfoREM, a 3D Radio Environment Map (REM) generation method that combines deterministic channel models and real-world data to map terrestrial network coverage at higher altitudes. At the core of our solution is a transformer model that translates radio propagation mapping into a sequence prediction task to construct REMs. Our results demonstrate that TransfoREM offers improved interpolation capability on real-world data compared against conventional Kriging and other machine learning (ML) techniques. Furthermore, TransfoREM is designed for holistic integration into cellular networks at the base station (BS) level, where it can build REMs, which can then be leveraged for enhanced resource allocation, interference management, and spatial spectrum utilization.
Collection: Datasets from AFAR Challenge
May 11, 2025



This paper presents a comprehensive real-world and Digital Twin (DT) dataset collected as part of the Find A Rover (AFAR) Challenge, organized by the NSF Aerial Experimentation and Research Platform for Advanced Wireless (AERPAW) testbed and hosted at the Lake Wheeler Field in Raleigh, North Carolina. The AFAR Challenge was a competition involving five finalist university teams, focused on promoting innovation in UAV-assisted radio frequency (RF) source localization. Participating teams were tasked with designing UAV flight trajectories and localization algorithms to detect the position of a hidden unmanned ground vehicle (UGV), also referred to as a rover, emitting wireless probe signals generated by GNU Radio. The competition was structured to evaluate solutions in a DT environment first, followed by deployment and testing in AERPAW's outdoor wireless testbed. For each team, the UGV was placed at three different positions, resulting in a total of 30 datasets, 15 collected in a DT simulation environment and 15 in a physical outdoor testbed. Each dataset contains time-synchronized measurements of received signal strength (RSS), received signal quality (RSQ), GPS coordinates, UAV velocity, and UAV orientation (roll, pitch, and yaw). Data is organized into structured folders by team, environment (DT and real-world), and UGV location. The dataset supports research in UAV-assisted RF source localization, air-to-ground (A2G) wireless propagation modeling, trajectory optimization, signal prediction, autonomous navigation, and DT validation. With approximately 300k time-synchronized samples collected from real-world experiments, the dataset provides a substantial foundation for training and evaluating deep learning (DL) models. Overall, the AFAR dataset serves as a valuable resource for advancing robust, real-world solutions in UAV-enabled wireless communications and sensing systems.
Digital Twins for Supporting AI Research with Autonomous Vehicle Networks
Apr 01, 2024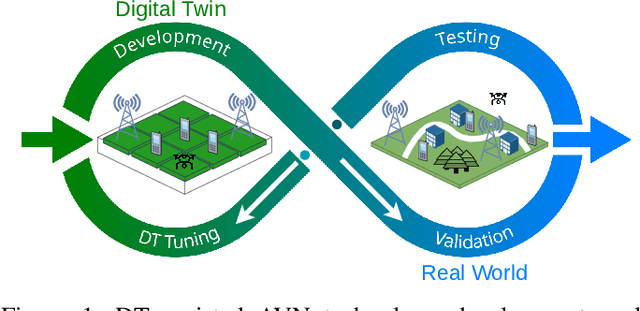
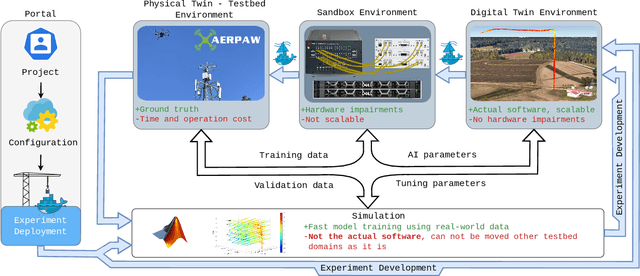
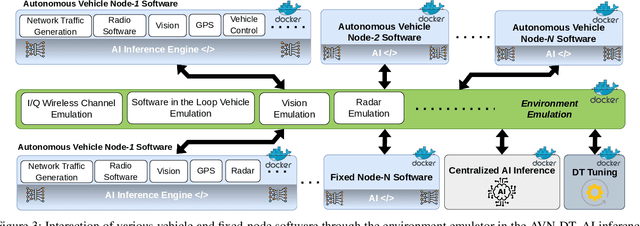
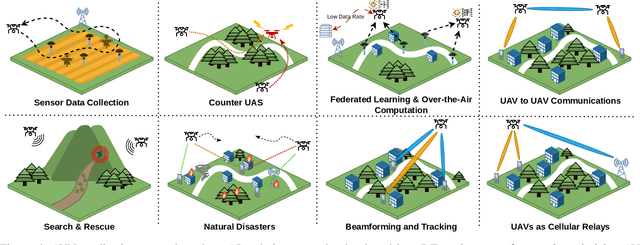
Digital twins (DTs), which are virtual environments that simulate, predict, and optimize the performance of their physical counterparts, are envisioned to be essential technologies for advancing next-generation wireless networks. While DTs have been studied extensively for wireless networks, their use in conjunction with autonomous vehicles with programmable mobility remains relatively under-explored. In this paper, we study DTs used as a development environment to design, deploy, and test artificial intelligence (AI) techniques that use real-time observations, e.g. radio key performance indicators, for vehicle trajectory and network optimization decisions in an autonomous vehicle networks (AVN). We first compare and contrast the use of simulation, digital twin (software in the loop (SITL)), sandbox (hardware-in-the-loop (HITL)), and physical testbed environments for their suitability in developing and testing AI algorithms for AVNs. We then review various representative use cases of DTs for AVN scenarios. Finally, we provide an example from the NSF AERPAW platform where a DT is used to develop and test AI-aided solutions for autonomous unmanned aerial vehicles for localizing a signal source based solely on link quality measurements. Our results in the physical testbed show that SITL DTs, when supplemented with data from real-world (RW) measurements and simulations, can serve as an ideal environment for developing and testing innovative AI solutions for AVNs.
Kriging-Based 3-D Spectrum Awareness for Radio Dynamic Zones Using Aerial Spectrum Sensors
Jul 12, 2023



Radio dynamic zones (RDZs) are geographical areas within which dedicated spectrum resources are monitored and controlled to enable the development and testing of new spectrum technologies. Real-time spectrum awareness within an RDZ is critical for preventing interference with nearby incumbent users of the spectrum. In this paper, we consider a 3D RDZ scenario and propose to use unmanned aerial vehicles (UAVs) equipped with spectrum sensors to create and maintain a 3D radio map of received signal power from different sources within the RDZ. In particular, we introduce a 3D Kriging interpolation technique that uses realistic 3D correlation models of the signal power extracted from extensive measurements carried out at the NSF AERPAW platform. Using C-Band signal measurements by a UAV at altitudes between 30 m-110 m, we first develop realistic propagation models on air-to-ground path loss, shadowing, spatial correlation, and semi-variogram, while taking into account the knowledge of antenna radiation patterns and ground reflection. Subsequently, we generate a 3D radio map of a signal source within the RDZ using the Kriging interpolation and evaluate its sensitivity to the number of measurements used and their spatial distribution. Our results show that the proposed 3D Kriging interpolation technique provides significantly better radio maps when compared with an approach that assumes perfect knowledge of path loss.
SDR-Based 5G NR C-Band I/Q Monitoring and Surveillance in Urban Area Using a Helikite
Mar 03, 2023In this paper, we report experimental results in collectting and processing 5G NR I/Q samples in the 3.7~GHz C-band by using software-defined radio (SDR)-mounted helikite. We use MATLAB's 5G toolbox to post-process the collected data, to obtain the synchronization signal block (SSB) from the I/Q samples and then go through the cell search, synchronization procedures, and reference signal received power (RSRP) and reference signal received quality (RSRQ) calculation. We plot these performance metrics for various physical cell identities as a function of the helikite's altitude. Furthermore, building on our experience with the collected and post-processed data, we discuss potential vulnerabilities of 5G NR systems to surveillance, jamming attacks, and post quantum era attacks.
LTE I/Q Data Set for UAV Propagation Modeling, Communication, and Navigation Research
Mar 03, 2023Recently, unmanned aerial vehicles (UAVs) have been receiving significant attention due to their wide range of potential application areas. To support UAV use cases with beyond visual line of sight (BVLOS) and autonomous flights, cellular networks can serve as ground connectivity points, and they can provide remote control and payload communication for UAV links. However, there are limited data sets to study the coverage of cellular technologies for UAV flights at different altitudes and develop machine learning (ML) techniques for improving UAV communication and navigation. In this article, we present raw LTE I/Q sample data sets from physical field experiments in the Lake Wheeler farm area of the NSF AERPAW experimentation platform. We fly a UAV that carries a software-defined radio (SDR) at altitudes ranging from 30~m to 110~m and collect raw I/Q samples from an SDR-based LTE base station on the ground operating at 3.51 GHz. We adopt a standard metadata format for reproducing the results from the collected data sets. The post-processing of raw I/Q samples using MATLAB's 4G LTE toolbox is described and various representative results are provided. In the end, we discuss the possible ways that our provided data set, post-processing sample code, and sample experiment code for collecting I/Q measurements and vehicle control can be used by other ML researchers in the future.
A Millimeter-Wave Software-Defined Radio for Wireless Experimentation
Feb 16, 2023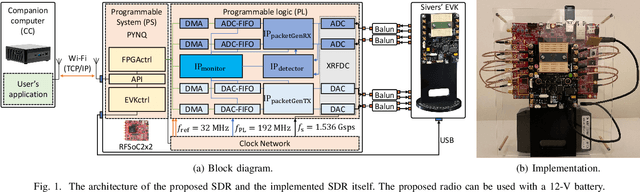
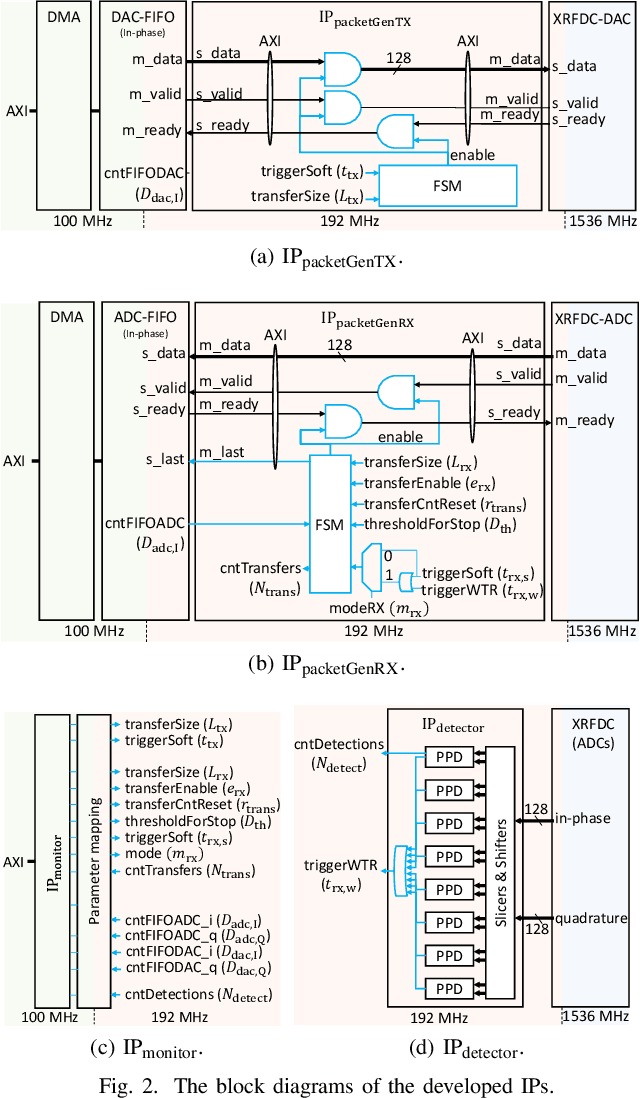
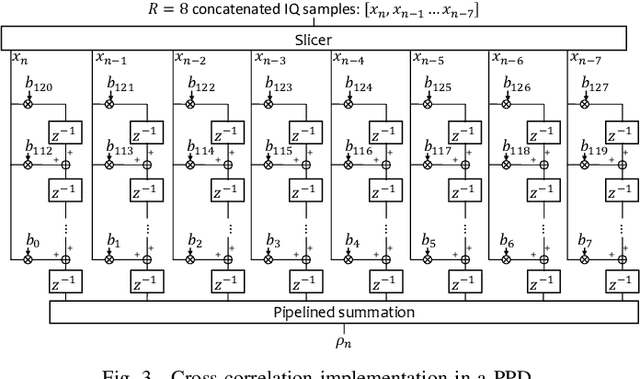
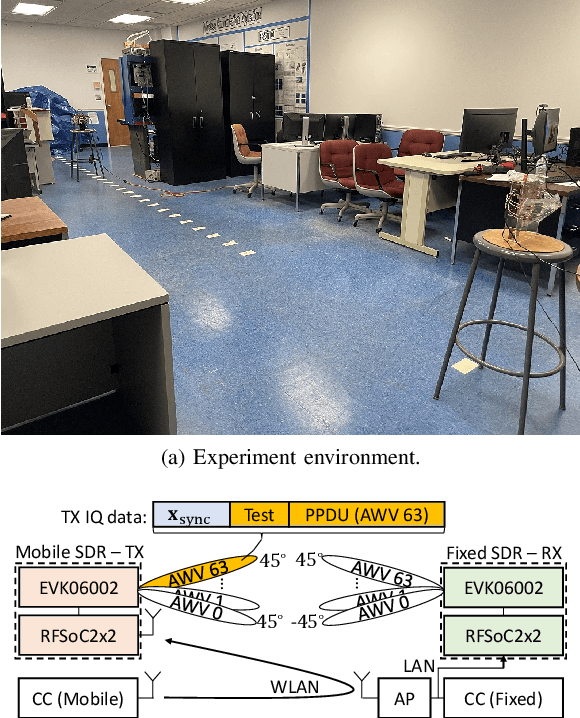
In this study, we propose a low-cost and portable millimeter-wave software-defined radio (SDR) for wireless experimentation in the 60 GHz band. The proposed SDR uses Xilinx RFSoC2x2 and Sivers EVK06002 homodyne transceiver and provides a TCP/IP-based interface for companion computer (CC)-based baseband signal processing. To address the large difference between the processing speed of the CC and the sample rate of analog-to-digital converters, we propose a method, called waveform-triggered reception (WTR), where a hard-coded block detects a special trigger waveform to acquire a pre-determined number of IQ samples upon the detection. We also introduce a buffer mechanism to support discontinuous transmissions. By utilizing the WTR along with discontinuous transmissions, we conduct a beam sweeping experiment, where we evaluate 4096 beam pairs rapidly without compromising the flexibility of the CC-based processing. We also generate a dataset that allows one to calculate physical layer parameters such as signal-to-noise ratio and channel frequency response for a given pair of transmit and receive beam indices.
Distributed Robust Geocast Multicast Routing for Inter-Vehicle Communication
Mar 31, 2022



Numerous protocols for geocast have been proposed in literature. It has been shown that explicit route setup approaches perform poorly with VANETs due to limited route lifetime and frequent network fragmentation. The broadcast based approaches have considerable redundancy and add significantly to the overhead of the protocol. A completely distributed and robust geocast approach is presented in this paper, that is resilient to frequent topology changes and network fragmentation. A distance-based backoff algorithm is used to reduce the number of hops and a novel mechanism to reduce redundant broadcasts is introduced. The performance of the proposed protocol is evaluated for various scenarios and compared with simple flooding and a protocol based on explicit route setup.
* 12 pages