 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Spectrum Awareness for Radio Dynamic Zones Using Kriging and Matrix Completion
Mar 11, 2026Radio Dynamic Zones (RDZs) are geographically defined areas specifically allocated for testing new wireless technologies. It is essential to safeguard the regular spectrum users outside the zones from the interference caused by the deployed equipment within this zone. Previous works have utilized sparse reference signal received power (RSRP) measurements collected by unmanned aerial vehicles (UAVs) to construct a dense 3D radio map through ordinary Kriging. In this work, we illustrate that matrix completion can outperform ordinary Kriging. We partitioned a 2D area of interest into small square grids where each grid corresponds to a single entry of a matrix. The matrix completion algorithm learns the global structure of the radio environment map by leveraging the low-rank property of propagation maps. Additionally, we illustrate that the simple Kriging and trans-Gaussian Kriging yield better results when the density of known measurements is lower. Earlier works of RSRP prediction involved a training dataset at a single altitude. In this work, we also show that performance can be improved by utilizing a combined dataset from multiple altitudes.
* Published in IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), 2024
UAV-Based 3D Spectrum Sensing: Insights on Altitude, Bandwidth, Trajectory, and Effective Antenna Patterns on REM Reconstruction
Mar 11, 2026Spectrum sensing and the generation of 3D Radio Environment Maps (REMs) are essential for enabling spectrum sharing within cognitive radio networks. While Uncrewed Aerial Vehicles (UAVs) offer high-mobility 3D sensing, REM accuracy is challenged by dynamic flight behaviors, where fluctuations in UAV speed and direction introduce measurement inconsistencies. Furthermore, the structural influence of the airframe itself impacts the onboard antenna's radiation characteristics. In this paper, we present a comprehensive analysis of REM reconstruction at various altitudes, using real-world data from a fixed base station tower and a ground-vehicle source. We evaluate diverse reconstruction methodologies, including Kriging (simple, ordinary, and trans-Gaussian), matrix completion, and Gaussian process regression (GPR) for recovery from sparse samples. Our results indicate that simple Kriging and GPR remain more robust under extreme sample sparsity. We also propose a framework to enhance reconstruction accuracy in deep-shadowed regions by decomposing the REM into distinct smooth and deep-shadowed spatial components. We further investigate how REM reconstruction performance is influenced by physical and UAV-related external parameters. First, we demonstrate that the impact of UAV altitude on accuracy follows a tri-phasic trend: an initial performance gain up to $h_1$, a performance dip between $h_1$ and $h_2$, and a final stage of increasing accuracy. Additionally, we show that performance improves with increased spectrum bandwidth. Second, our analysis of UAV trajectories reveals that the variance of shadow fading exhibits a non-monotonic trend, peaking at both very low and mid-high elevation angles. Finally, we demonstrate that antenna pattern calibration from in-field measurements significantly enhances REM reconstruction accuracy by accounting for shadowing induced by the UAV airframe.
Height-Dependent Spectrum Activity Measurements and Modeling: A Case Study with FM Radio Bands
Feb 24, 2026The increasing demand for wireless connectivity necessitates advanced spectrum modeling to enable efficient spectrum sharing for next-generation aerial communications. While traditional models often overlook vertical variations in signal behavior, this paper proposes a height-dependent propagation model using a helikite-mounted software-defined radio (SDR). We collected extensive measurement data across the 88 MHz to 6 GHz range in both urban and rural environments. As a case study to validate our methodology, we focus on the FM radio band, which allows us to use publicly available transmitter locations and transmit power levels to facilitate comparisons between analytical with measurement results. We identify a clear transition from non-line-of-sight (NLoS) to line-of-sight (LoS) regimes at a specific altitude threshold and propose an altitude-dependent path loss model that incorporates this transition. Our results demonstrate that the proposed model significantly outperforms the standard free space path loss (FSPL) model in complex urban topologies, providing a more accurate framework for altitude-aware spectrum prediction and management across emerging aerial wireless technologies and bands.
Reliability of Wi-Fi, LTE, and 5G-Based UAV RC Links in ISM Bands: Uplink Interference Asymmetry Analysis and HARQ Design
Jul 27, 2025Command and control of uncrewed aerial vehicles (UAVs) is often realized through air-to-ground (A2G) remote control (RC) links that operate in ISM bands. While wireless fidelity (Wi-Fi) technology is commonly used for UAV RC links, ISM-based long-term evolution (LTE) and fifth-generation (5G) technologies have also been recently considered for the same purpose. A major problem for UAV RC links in the ISM bands is that other types of interference sources, such as legacy Wi-Fi and Bluetooth transmissions, may degrade the link quality. Such interference problems are a higher concern for the UAV in the air than the RC unit on the ground due to the UAV being in line-of-sight (LoS) with a larger number of interference sources. To obtain empirical evidence of the asymmetric interference conditions in downlink (DL) and uplink (UL), we first conducted a measurement campaign using a helikite platform in urban and rural areas at NC State University. The results from this measurement campaign show that the aggregate interference can be up to 16.66 dB at higher altitudes up to 170 m, compared with the interference observed at a ground receiver. As a result of this asymmetric UL interference, lost hybrid automatic repeat request (HARQ) indicators (ACK/NACK) in the UL may degrade the DL throughput. To investigate this, we study various HARQ mechanisms, including HARQ Type-I with no combining, HARQ Type-I with chase combining, HARQ Type-III with incremental redundancy, and burst transmission with chase combining. To evaluate the impact of asymmetric UL interference on throughput performance, we consider three steps of evaluation process: 1) standalone physical DL shared channel (PDSCH) throughput evaluation with perfect ACK/NACK assumption; 2) standalone physical UL control channel (PUCCH) decoding reliability evaluation; and 3) PDSCH DL throughput evaluation with asymmetric UL ACK/NACK transmission.
Altitude-Dependent Cellular Spectrum Occupancy: from Measurements to Stochastic Geometry Models
Nov 09, 2024The growing demand for aerial connectivity with unmanned aerial vehicles (UAVs) across diverse settings, ranging from urban to rural scenarios, requires developing a better understanding of spectrum occupancy at aerial corridors. In particular, understanding the altitude-dependent behavior of spectrum occupancy in cellular networks, which could be used in the future for enabling beyond visual line of sight (BVLOS) UAV connectivity, is critical. While there are existing models for characterizing altitude-dependent interference in the literature, they are not validated with data and need to be compared with real-world measurements. To address these gaps, in this paper, we conduct cellular spectrum occupancy measurements at various sub-6 GHz bands for altitudes up to 300 meters, in both urban and rural environments. To model the spectrum occupancy measurements, we introduce two different approaches: a theoretical model utilizing stochastic geometry with altitude-dependent factors (SOSGAD), and a ray-tracing model tailored to site-specific line of sight (LOS) and non-LOS scenarios. We analyze the asymptotic behavior of the SOSGAD model as the UAV altitude increases. Through comparative analysis, we assess the effectiveness of the SOSGAD and ray-tracing models for characterizing actual spectrum occupancy as a function of altitude. Our results show that the proposed SOSGAD model can be tuned to closely characterize the real-world spectrum occupancy behavior as the UAV altitude increases.
UAV Corridor Coverage Analysis with Base Station Antenna Uptilt and Strongest Signal Association
Mar 27, 2024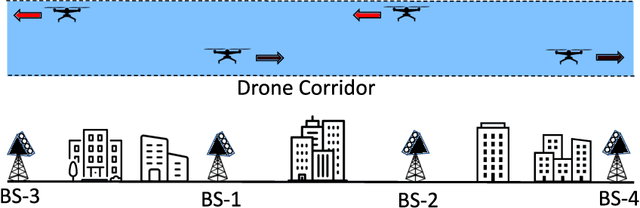
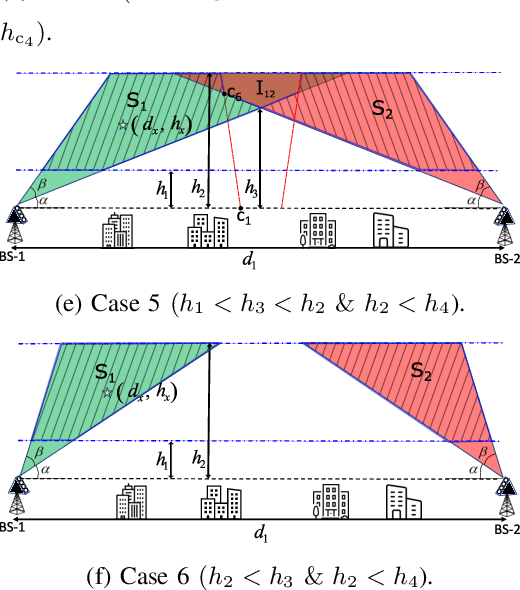
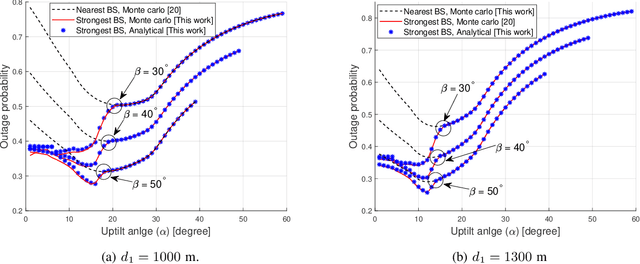
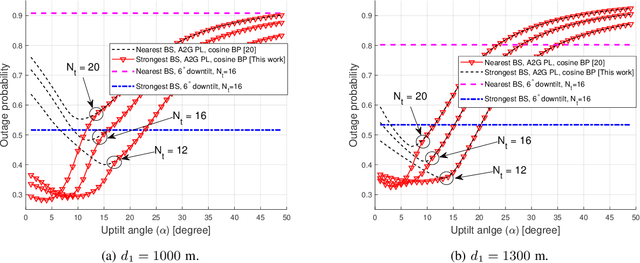
Unmanned aerial vehicle (UAV) corridors are sky lanes where UAVs fly through safely between their origin and destination. To ensure the successful operation of UAV corridors, beyond visual line of sight (BVLOS) wireless connectivity within the corridor is crucial. One promising solution to support this is the use of cellular-connected UAV (C-UAV) networks, which offer long-range and seamless wireless coverage. However, conventional terrestrial base stations (BSs) that typically employ down-tilted sector antennas to serve ground users are not ideally suited to serve the aerial vehicles positioned above the BSs. In our previous work, we focused on studying the optimal uptilt angle of BS antennas to maximize the wireless coverage probability in UAV corridors. However, the association of BSs with UAVs was restricted to the nearest BS association, which limits the potential coverage benefits. In this paper, we address this limitation by considering the strongest BS signal association in UAV corridors, which enables enhanced coverage within the corridor compared to the nearest BS association. The strongest BS association allows UAVs to connect with the second nearest BSs while also accounting for interference from the third nearest BSs. Closed-form expression analysis and simulation results show that the strongest BSs association in UAV corridors yields a superior coverage probability when compared to the nearest BS association.
Impact of 3D Antenna Radiation Pattern in UAV Air-to-Ground Path Loss Modeling and RSRP-based Localization in Rural Area
Jul 24, 2023Ensuring reliable and seamless wireless connectivity for unmanned aerial vehicles (UAVs) has emerged as a critical requirement for a wide range of applications. The increasing deployment of UAVs has increased the significance of cellular-connected UAVs (C-UAVs) in enabling beyond-visual line of sight (BVLOS) communications. To ensure the successful operation of C-UAVs within existing terrestrial networks, it is vital to understand the distinctive characteristics associated with air-to-ground signal propagation. In this paper, we investigate the impact of 3D antenna patterns on a UAV air-to-ground path loss model, utilizing datasets obtained from a measurement campaign. We conducted UAV experiments in a rural area at various fixed heights, while also characterizing the 3D antenna radiation pattern by using an anechoic chamber facility. By analyzing reference signal received power (RSRP) using path loss models that account for antenna patterns, we observed that our measurement results, obtained at different UAV heights, aligned well with the two-ray path loss model when incorporating the measured antenna pattern. we propose an RSRP-based localization algorithm at a UAV that takes into account antenna patterns in both offline and online scenarios. Through our experimentation dataset, we show that incorporating measured antenna patterns significantly enhances the source localization accuracy.
Kriging-Based 3-D Spectrum Awareness for Radio Dynamic Zones Using Aerial Spectrum Sensors
Jul 12, 2023



Radio dynamic zones (RDZs) are geographical areas within which dedicated spectrum resources are monitored and controlled to enable the development and testing of new spectrum technologies. Real-time spectrum awareness within an RDZ is critical for preventing interference with nearby incumbent users of the spectrum. In this paper, we consider a 3D RDZ scenario and propose to use unmanned aerial vehicles (UAVs) equipped with spectrum sensors to create and maintain a 3D radio map of received signal power from different sources within the RDZ. In particular, we introduce a 3D Kriging interpolation technique that uses realistic 3D correlation models of the signal power extracted from extensive measurements carried out at the NSF AERPAW platform. Using C-Band signal measurements by a UAV at altitudes between 30 m-110 m, we first develop realistic propagation models on air-to-ground path loss, shadowing, spatial correlation, and semi-variogram, while taking into account the knowledge of antenna radiation patterns and ground reflection. Subsequently, we generate a 3D radio map of a signal source within the RDZ using the Kriging interpolation and evaluate its sensitivity to the number of measurements used and their spatial distribution. Our results show that the proposed 3D Kriging interpolation technique provides significantly better radio maps when compared with an approach that assumes perfect knowledge of path loss.
RF SSSL by an Autonomous UAV with Two-Ray Channel Model and Dipole Antenna Patterns
May 28, 2023Advancements in unmanned aerial vehicle (UAV) technology have led to their increased utilization in various commercial and military applications. One such application is signal source search and localization (SSSL) using UAVs, which offers significant benefits over traditional ground-based methods due to improved RF signal reception at higher altitudes and inherent autonomous 3D navigation capabilities. Nevertheless, practical considerations such as propagation models and antenna patterns are frequently neglected in simulation-based studies in the literature. In this work, we address these limitations by using a two-ray channel model and a dipole antenna pattern to develop a simulator that more closely represents real-world radio signal strength (RSS) observations at a UAV. We then examine and compare the performance of previously proposed linear least square (LLS) based localization techniques using UAVs for SSSL. Localization of radio frequency (RF) signal sources is assessed based on two main criteria: 1) achieving the highest possible accuracy and 2) localizing the target as quickly as possible with reasonable accuracy. Various mission types, such as those requiring precise localization like identifying hostile troops, and those demanding rapid localization like search and rescue operations during disasters, have been previously investigated. In this paper, the efficacy of the proposed localization approaches is examined based on these two main localization requirements through computer simulations.
LTE I/Q Data Set for UAV Propagation Modeling, Communication, and Navigation Research
Mar 03, 2023Recently, unmanned aerial vehicles (UAVs) have been receiving significant attention due to their wide range of potential application areas. To support UAV use cases with beyond visual line of sight (BVLOS) and autonomous flights, cellular networks can serve as ground connectivity points, and they can provide remote control and payload communication for UAV links. However, there are limited data sets to study the coverage of cellular technologies for UAV flights at different altitudes and develop machine learning (ML) techniques for improving UAV communication and navigation. In this article, we present raw LTE I/Q sample data sets from physical field experiments in the Lake Wheeler farm area of the NSF AERPAW experimentation platform. We fly a UAV that carries a software-defined radio (SDR) at altitudes ranging from 30~m to 110~m and collect raw I/Q samples from an SDR-based LTE base station on the ground operating at 3.51 GHz. We adopt a standard metadata format for reproducing the results from the collected data sets. The post-processing of raw I/Q samples using MATLAB's 4G LTE toolbox is described and various representative results are provided. In the end, we discuss the possible ways that our provided data set, post-processing sample code, and sample experiment code for collecting I/Q measurements and vehicle control can be used by other ML researchers in the future.