 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of 3D Antenna Radiation Pattern in UAV Air-to-Ground Path Loss Modeling and RSRP-based Localization in Rural Area
Jul 24, 2023Ensuring reliable and seamless wireless connectivity for unmanned aerial vehicles (UAVs) has emerged as a critical requirement for a wide range of applications. The increasing deployment of UAVs has increased the significance of cellular-connected UAVs (C-UAVs) in enabling beyond-visual line of sight (BVLOS) communications. To ensure the successful operation of C-UAVs within existing terrestrial networks, it is vital to understand the distinctive characteristics associated with air-to-ground signal propagation. In this paper, we investigate the impact of 3D antenna patterns on a UAV air-to-ground path loss model, utilizing datasets obtained from a measurement campaign. We conducted UAV experiments in a rural area at various fixed heights, while also characterizing the 3D antenna radiation pattern by using an anechoic chamber facility. By analyzing reference signal received power (RSRP) using path loss models that account for antenna patterns, we observed that our measurement results, obtained at different UAV heights, aligned well with the two-ray path loss model when incorporating the measured antenna pattern. we propose an RSRP-based localization algorithm at a UAV that takes into account antenna patterns in both offline and online scenarios. Through our experimentation dataset, we show that incorporating measured antenna patterns significantly enhances the source localization accuracy.
RF SSSL by an Autonomous UAV with Two-Ray Channel Model and Dipole Antenna Patterns
May 28, 2023Advancements in unmanned aerial vehicle (UAV) technology have led to their increased utilization in various commercial and military applications. One such application is signal source search and localization (SSSL) using UAVs, which offers significant benefits over traditional ground-based methods due to improved RF signal reception at higher altitudes and inherent autonomous 3D navigation capabilities. Nevertheless, practical considerations such as propagation models and antenna patterns are frequently neglected in simulation-based studies in the literature. In this work, we address these limitations by using a two-ray channel model and a dipole antenna pattern to develop a simulator that more closely represents real-world radio signal strength (RSS) observations at a UAV. We then examine and compare the performance of previously proposed linear least square (LLS) based localization techniques using UAVs for SSSL. Localization of radio frequency (RF) signal sources is assessed based on two main criteria: 1) achieving the highest possible accuracy and 2) localizing the target as quickly as possible with reasonable accuracy. Various mission types, such as those requiring precise localization like identifying hostile troops, and those demanding rapid localization like search and rescue operations during disasters, have been previously investigated. In this paper, the efficacy of the proposed localization approaches is examined based on these two main localization requirements through computer simulations.
RF Signal Source Search and Localization Using an Autonomous UAV with Predefined Waypoints
Jan 17, 2023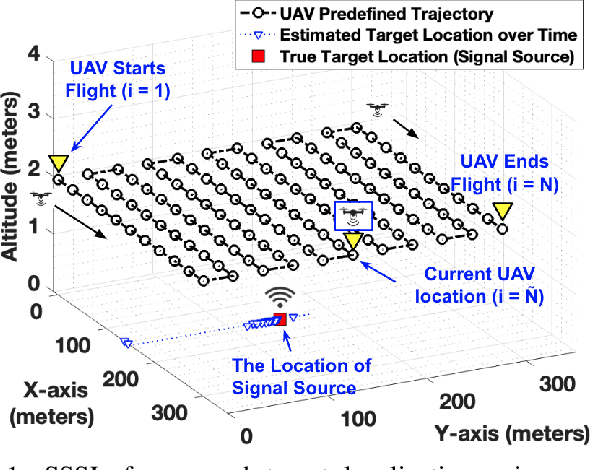
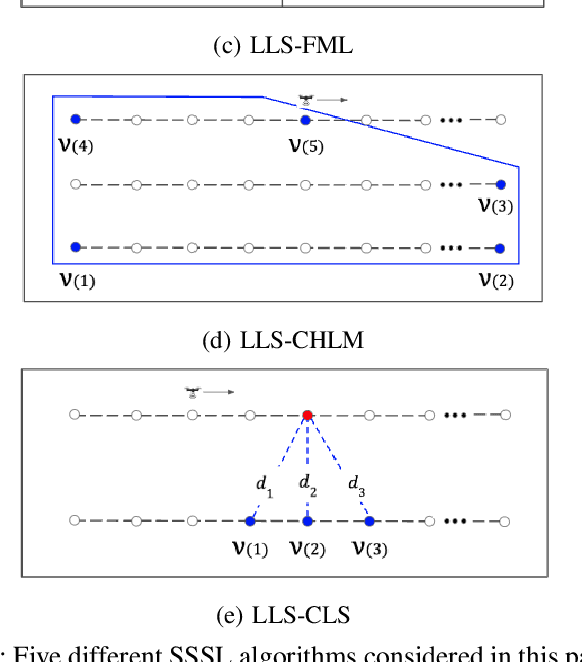
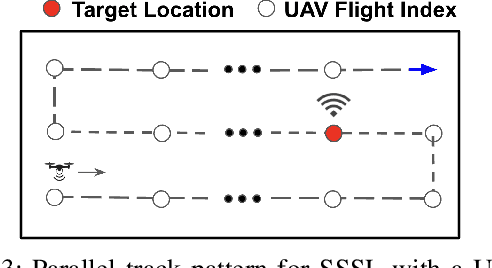
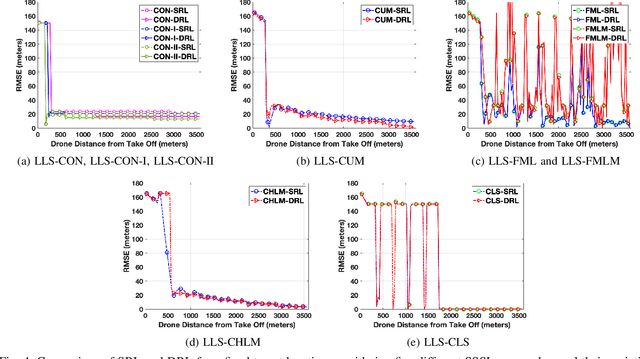
Localization of a radio frequency (RF) signal source has various use cases, ranging from search and rescue, identification and deactivation of jammers, and tracking hostile activity near borders or on the battlefield. The use of unmanned aerial vehicles (UAVs) for signal source search and localization (SSSL) can have significant advantages when compared to terrestrial-based approaches, due to the ease of capturing RF signals at higher altitudes and the autonomous 3D navigation capabilities of UAVs. However, the limited flight duration of UAVs due to battery constraints, as well as limited computational resources on board of lightweight UAVs introduce challenges for SSSL. In this paper, we study various SSSL techniques using a UAV with predefined waypoints. A linear least square (LLS) based localization scheme is considered with enhanced reference selection due to its relatively lower computational complexity. Five different LLS localization algorithms are proposed and studied for selecting anchor positions to be used for localization as the UAV navigates through an area. The performance of each algorithm is measured in two ways: 1) real-time positioning accuracy during the ongoing UAV flight, and 2) long-term accuracy measured at the end of the UAV flight. We compare and analyze the performance of the proposed approaches using computer simulations in terms of accuracy, UAV flight distance, and reliability.