 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoors in the Sky: Detection, Localization and Classification of Aerial Vehicles using Laser Mesh
Nov 14, 2021
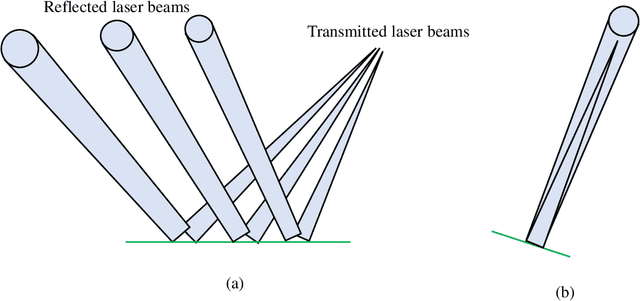
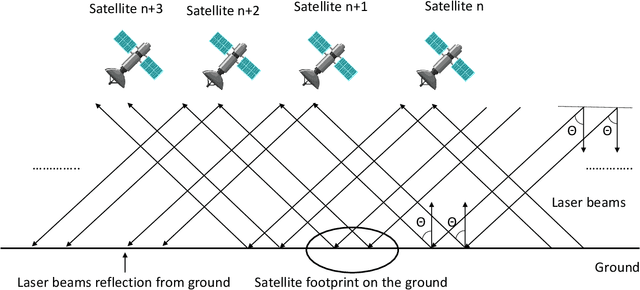
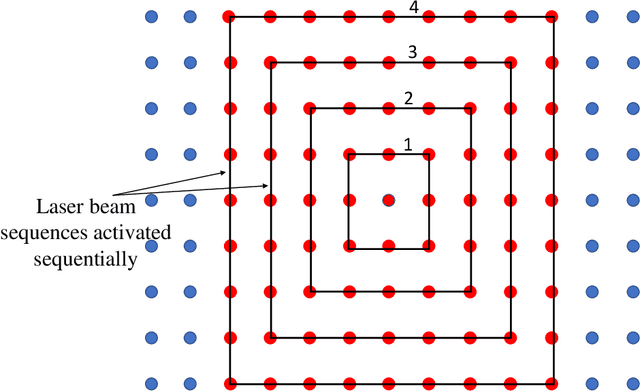
The stealth technology and unmanned aerial vehicles (UAVs) are expected to dominate current and future aerial warfare. The radar systems at their maximum operating ranges, however, are not always able to detect stealth and small UAVs mainly due to their small radar cross-sections and/or low altitudes. In this paper, a novel technique as an alternative to radar technology is proposed. The proposed approach is based on creating a mesh structure of laser beams initiated from aerial platforms towards the ground. The laser mesh acts as a virtual net in the sky. Any aerial vehicle disrupting the path of the laser beams are detected and subsequently localized and tracked. As an additional feature, steering of the beams can be used for increased coverage and improved localization and classification performance. A database of different types of aerial vehicles is created artificially based on Gaussian distributions. The database is used to develop several machine learning (ML) models using different algorithms to classify a target. Overall, we demonstrated through simulations that our proposed model achieves simultaneous detection, classification, localization, and tracking of a target.
Experimental Study of Outdoor UAV Localization and Tracking using Passive RF Sensing
Sep 03, 2021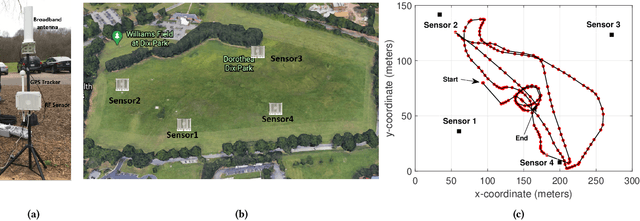

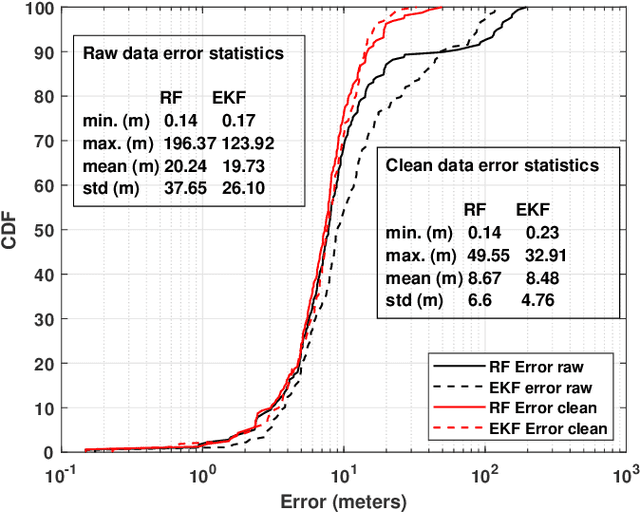
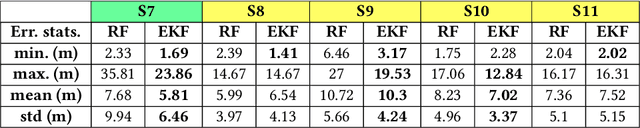
Extensive use of unmanned aerial vehicles (UAVs) is expected to raise privacy and security concerns among individuals and communities. In this context, the detection and localization of UAVs will be critical for maintaining safe and secure airspace in the future. In this work, Keysight N6854A radio frequency (RF) sensors are used to detect and locate a UAV by passively monitoring the signals emitted from the UAV. First, the Keysight sensor detects the UAV by comparing the received RF signature with various other UAVs' RF signatures in the Keysight database using an envelope detection algorithm. Afterward, time difference of arrival (TDoA) based localization is performed by a central controller using the sensor data, and the drone is localized with some error. To mitigate the localization error, implementation of an extended Kalman filter~(EKF) is proposed in this study. The performance of the proposed approach is evaluated on a realistic experimental dataset. EKF requires basic assumptions on the type of motion throughout the trajectory, i.e., the movement of the object is assumed to fit some motion model~(MM) such as constant velocity (CV), constant acceleration (CA), and constant turn (CT). In the experiments, an arbitrary trajectory is followed, therefore it is not feasible to fit the whole trajectory into a single MM. Consequently, the trajectory is segmented into sub-parts and a different MM is assumed in each segment while building the EKF model. Simulation results demonstrate an improvement in error statistics when EKF is used if the MM assumption aligns with the real motion.
60 GHz Outdoor Propagation Measurements and Analysis Using Facebook Terragraph Radios
Sep 02, 2021
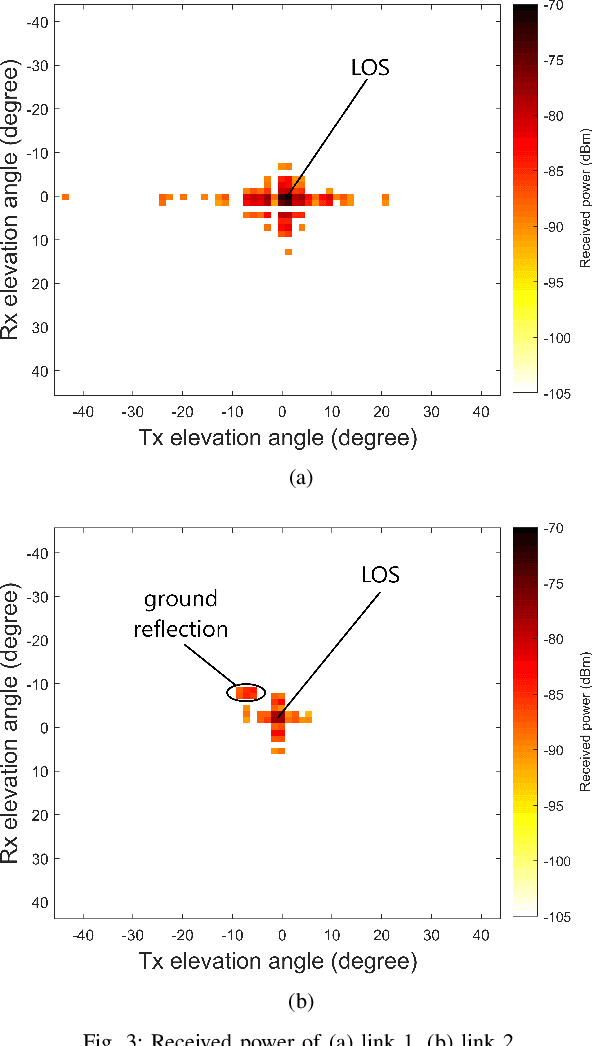
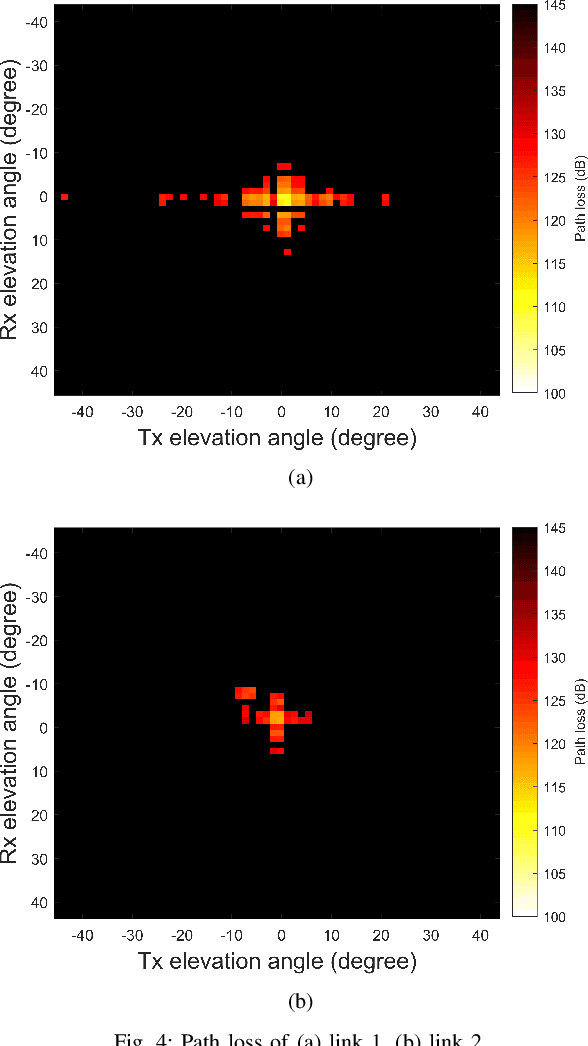

The high attenuation of millimeter-wave (mmWave) would significantly reduce the coverage areas, and hence it is critical to study the propagation characteristics of mmWave in multiple deployment scenarios. In this work, we investigated the propagation and scattering behavior of 60 GHz mmWave signals in outdoor environments at a travel distance of 98 m for an aerial link (rooftop to rooftop), and 147 m for a ground link (light-pole to light-pole). Measurements were carried out using Facebook Terragraph (TG) radios. Results include received power, path loss, signal-to-noise ratio (SNR), and root mean square (RMS) delay spread for all beamforming directions supported by the antenna array. Strong line-of-sight (LOS) propagation exists in both links. We also observed rich multipath components (MPCs) due to edge scatterings in the aerial link, while only LOS and ground reflection MPCs in the other link.
Channel Rank Improvement in Urban Drone Corridors Using Passive Intelligent Reflectors
Aug 04, 2021



Multiple-input multiple-output (MIMO) techniques can help in scaling the achievable air-to-ground (A2G) channel capacity while communicating with drones. However, spatial multiplexing with drones suffers from rank deficient channels due to the unobstructed line-of-sight (LoS), especially in millimeter-wave (mmWave) frequencies that use narrow beams. One possible solution is utilizing low-cost and low-complexity metamaterial-based intelligent reflecting surfaces (IRS) to enrich the multipath environment, taking into account that the drones are restricted to fly only within well-defined drone corridors. A hurdle with this solution is placing the IRSs optimally. In this study, we propose an approach for IRS placement with a goal to improve the spatial multiplexing gains, and hence to maximize the average channel capacity in a predefined drone corridor. Our results at 6 GHz, 28 GHz and 60 GHz show that the proposed approach increases the average rates for all frequency bands for a given drone corridor, when compared with the environment where there are no IRSs present, and IRS-aided channels perform close to each other at sub-6 and mmWave bands.